Algorithm Theoretical Basis Document
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Doc.10100.Space Weather Manual FINAL DRAFT Version
Doc 10100 Manual on Space Weather Information in Support of International Air Navigation Approved by the Secretary General and published under his authority First Edition – 2018 International Civil Aviation Organization TABLE OF CONTENTS Page Chapter 1. Introduction ..................................................................................................................................... 1-1 1.1 General ............................................................................................................................................... 1-1 1.2 Space weather indicators .................................................................................................................... 1-1 1.3 The hazards ........................................................................................................................................ 1-2 1.4 Space weather mitigation aspects ....................................................................................................... 1-3 1.5 Coordinating the response to a space weather event ......................................................................... 1-3 Chapter 2. Space Weather Phenomena and Aviation Operations ................................................................. 2-1 2.1 General ............................................................................................................................................... 2-1 2.2 Geomagnetic storms .......................................................................................................................... -
National Space Weather Program Implementation Plan, 2Nd Edition, July 2000
National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ The National Space Weather Program The Implementation Plan 2nd Edition July 2000 National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ NATIONAL SPACE WEATHER PROGRAM COUNCIL Mr. Samuel P. Williamson, Chairman Federal Coordinator Dr. David L. Evans Department of Commerce Colonel Michael A. Neyland, USAF Department of Defense Mr. Robert E. Waldron Department of Energy Mr. James F. Devine Department of the Interior Mr. David Whatley Department of Transportation Dr. Edward J. Weiler National Aeronautics and Space Administration Dr. Margaret S. Leinen National Science Foundation Lt Col Michael R. Babcock, USAF, Executive Secretary Office of the Federal Coordinator for Meteorological Services and Supporting Research National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ NATIONAL SPACE WEATHER PROGRAM Implementation Plan 2nd Edition Prepared by the Committee for Space Weather for the National Space Weather Program Council Office of the Federal Coordinator for Meteorology FCM-P31-2000 Washington, DC July 2000 National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ FOREWORD We are pleased to present this Second Edition of the National Space Weather Program Implementation Plan. We published the program's Strategic Plan in 1995 and the first Implementation Plan in 1997. In the intervening period, we have made tremendous progress toward our goals but much work remains to be accomplished to achieve our ultimate goal of providing the space weather observations, forecasts, and warnings needed by our Nation. -

Where Is the Best Site on Earth? Domes A, B, C, and F, And
Where is the best site on Earth? Saunders et al. 2009, PASP, 121, 976-992 Where is the best site on Earth? Domes A, B, C and F, and Ridges A and B Will Saunders1;2, Jon S. Lawrence1;2;3, John W.V. Storey1, Michael C.B. Ashley1 1School of Physics, University of New South Wales 2Anglo-Australian Observatory 3Macquarie University, New South Wales [email protected] Seiji Kato, Patrick Minnis, David M. Winker NASA Langley Research Center Guiping Liu Space Sciences Lab, University of California Berkeley Craig Kulesa Department of Astronomy and Steward Observatory, University of Arizona Saunders et al. 2009, PASP, 121 976992 Received 2009 May 26; accepted 2009 July 13; published 2009 August 20 ABSTRACT The Antarctic plateau contains the best sites on earth for many forms of astronomy, but none of the existing bases was selected with astronomy as the primary motivation. In this paper, we try to systematically compare the merits of potential observatory sites. We include South Pole, Domes A, C and F, and also Ridge B (running NE from Dome A), and what we call `Ridge A' (running SW from Dome A). Our analysis combines satellite data, published results and atmospheric models, to compare the boundary layer, weather, aurorae, airglow, precipitable water vapour, thermal sky emission, surface temperature, and the free atmosphere, at each site. We ¯nd that all Antarctic sites are likely to be compromised for optical work by airglow and aurorae. Of the sites with existing bases, Dome A is easily the best overall; but we ¯nd that Ridge A o®ers an even better site. -
Response of the Total Electron Content at Brazilian Low Latitudes to Corotating Interaction Region and High‑Speed Streams During Solar Minimum 2008 Claudia M
Candido et al. Earth, Planets and Space (2018) 70:104 https://doi.org/10.1186/s40623-018-0875-8 FULL PAPER Open Access Response of the total electron content at Brazilian low latitudes to corotating interaction region and high‑speed streams during solar minimum 2008 Claudia M. N. Candido1,2*, Inez S. Batista2, Virginia Klausner3, Patricia M. de Siqueira Negreti2, Fabio Becker‑Guedes2, Eurico R. de Paula2, Jiankui Shi1 and Emilia S. Correia2,4 Abstract In this work, we investigate the Brazilian low-latitude ionospheric response to two corotating interaction regions (CIRs) and high-speed streams (HSSs) events during the solar minimum of solar cycle 23, in 2008. The studied inter‑ vals are enclosed in the whole heliospheric interval, studied by other authors, for distinct longitudinal sectors. CIRs/ HSSs are structures commonly observed during the descending and low solar activity, and they are related to the occurrence of coronal holes. These events cause weak-to-moderate recurrent geomagnetic storms characterized by negative excursions of the interplanetary magnetic feld, IMF_Bz, as well as long-duration auroral activity, consid‑ ered as a favorable scenario for continuous prompt penetration interplanetary electric feld (PPEF). In this study, we used the vertical total electron content (VTEC) calculated from GPS receivers database from the Brazilian Continu‑ ous Monitoring Network managed by the Brazilian Institute of Geography and Statistics. Moreover, we analyzed the F-layer peak height, hmF2 and the critical plasma frequency, foF2, taken from a Digisonde installed at the southern crest of the equatorial ionization anomaly, in Cachoeira Paulista, CP. It was observed that during the CIRs/HSSs-driven geomagnetic disturbances VTEC increased more than 120% over the quiet times averaged values, which is compa‑ rable to intense geomagnetic storms. -
Benchmark Geomagnetic Disturbance Event Description
Benchmark Geomagnetic Disturbance Event Description Project 2013-03 GMD Mitigation Standard Drafting Team May 12, 2016 NERC | Report Title | Report Date 1 of 23 Table of Contents Preface ........................................................................................................................................................................3 Introduction ................................................................................................................................................................4 Background .............................................................................................................................................................4 General Characteristics ...........................................................................................................................................4 Benchmark GMD Event Description ...........................................................................................................................5 Reference Geoelectric Field Amplitude ..................................................................................................................5 Reference Geomagnetic Field Waveshape .............................................................................................................5 Appendix I – Technical Considerations .......................................................................................................................8 Statistical Considerations ........................................................................................................................................8 -

Solar and Geomagnetic Activity During March 1989 and Later Honths and Their Consequences at Earth and in Near-Earth Space
SOLAR AND GEOMAGNETIC ACTIVITY DURING MARCH 1989 AND LATER HONTHS AND THEIR CONSEQUENCES AT EARTH AND IN NEAR-EARTH SPACE J. H. Allen (NOAA/NESDIS/NGDC) Spacecraft Charging Technology Conference Naval Postgraduate School, Monterey, California October 31-November 3, 1989 ABSTRACT From 6-20 March 1989 the large, complex sunspot group Region 5395 rotated across the visible disc of the Sun producing many large flares that bombdrded Earth with a variety of intense radiation although the energetic particle spectra were unusually "soft". Aurorae were observed worldwide at low latitudes. On 13/14 March a "Great" magnetic storm occurred for which Ap* = 279 and AA* = 450. By both measures, this event rates among the largest historical magnetic storms. Geostationary sate1 1 i tes became interpl anetary monitors when the magnetopause moved earthward of 6.5 Re. Ionospheric condi- ticns were extremely disturbed, affecting hf through X-band comnunications and the operation of satellites used for surveys and navigation. At lower altitudes there were problems with satellite drag and due to the large mag- netic field changes associated with field-a1 igned current sheets. We are seeking reports of satellite anomalies at all altitudes. Reports also have been received about effects of these Sol ar-Terrestria1 di sturbances on other technology at Earth and in near-Earth space. This presentation draws heavily on material in a shorter, summary paper "iri prgss" for "EOS" (Allen, et. al., 1989). Recent major solar activity since the abstract. was submitted happened in mid-August, late September, and mid-October 1989. These events and their consequences at Earth and in Space are covered briefly. -

Improvement of Global Ionospheric TEC Derivation with Multi-Source Data in Modip Latitude
atmosphere Article Improvement of Global Ionospheric TEC Derivation with Multi-Source Data in Modip Latitude Weizheng Fu 1,2 , Guanyi Ma 1,3,* , Weijun Lu 1,3 , Takashi Maruyama 4, Jinghua Li 1, Qingtao Wan 1, Jiangtao Fan 1 and Xiaolan Wang 1 1 National Astronomical Observatories, Chinese Academy of Sciences, Beijing 100101, China; [email protected] (W.F.); [email protected] (W.L.); [email protected] (J.L.); [email protected] (Q.W.); [email protected] (J.F.); [email protected] (X.W.). 2 Research Institute for Sustainable Humanosphere, Kyoto University, Uji, Kyoto 611-0011, Japan 3 School of Astronomy and Space Science, University of Chinese Academy of Sciences, Beijing 100049, China 4 National Institute of Information and Communications Technology, Tokyo 183-8795, Japan; [email protected] * Correspondence: [email protected] Abstract: Global ionospheric total electron content (TEC) is generally derived with ground-based Global Navigation Satellite System (GNSS) observations based on mathematical models in a solar- geomagnetic reference frame. However, ground-based observations are not well-distributed. There is a lack of observations over sparsely populated areas and vast oceans, where the accuracy of TEC derivation is reduced. Additionally, the modified dip (modip) latitude is more suitable than geomagnetic latitude for the ionosphere. This paper investigates the improvement of global TEC with multi-source data and modip latitude, and a simulation with International Reference Ionosphere (IRI) model is developed. Compared with using ground-based observations in geomagnetic latitude, the mean improvement was about 10.88% after the addition of space-based observations and the adoption Citation: Fu, W.; Ma, G.; Lu, W.; of modip latitude. -

Spatial and Seasonal Effects on the Delayed Ionospheric Response to Solar EUV Changes
Spatial and seasonal effects on the delayed ionospheric response to solar EUV changes Erik Schmölter1, Jens Berdermann1, Norbert Jakowski1, and Christoph Jacobi2 1German Aerospace Center, Kalkhorstweg 53, 17235 Neustrelitz, Germany 2Leipzig Institute for Meteorology, Universität Leipzig, Stephanstr. 3, 04103 Leipzig, Germany Correspondence: Erik Schmölter ([email protected]) Abstract. This study correlates different ionospheric parameters with the integrated solar EUV radiation to analyze the delayed ionospheric response, testing and improving upon previous studies on the ionospheric delay. Several time series of correlation coefficients and delays are presented to characterize the trend of the ionospheric delay from January 2011 to December 2013. The impact of the diurnal variations of ionospheric parameters in the analysis at an hourly resolution for fixed locations are 5 discussed and specified with calculations in different time scales and with comparison to solar and geomagnetic activity. An average delay for TEC of ≈ 18:7 hours and for foF2 of ≈ 18:6 hours is calculated at four European stations. The difference between northern and southern hemisphere is analyzed by comparisons with the Australian region. A seasonal variation of the delay between northern and southern hemisphere is calculated for TEC with ≈ 5 ± 0:7 hours and foF2 with ≈ 8 ± 0:8 hours. The latitudinal and longitudinal variability of the delay is analyzed for the European region, and found to be characterized by 10 a decrease in the delay from ≈ 21:5 hours at 30◦N to ≈ 19:0 hours at 70◦N for summer months. For winter months, a roughly constant delay of ≈ 19:5 hours is calculated. The results based on solar and ionospheric data at hourly resolution and the analysis of the delayed ionospheric response to solar EUV show the seasonal and latitudinal variations. -

Interhemispheric Comparison of GPS Phase Scintillation at High Latitudes During the Magnetic-Cloud-Induced Geomagnetic Storm of 5–7 April 2010
Ann. Geophys., 29, 2287–2304, 2011 www.ann-geophys.net/29/2287/2011/ Annales doi:10.5194/angeo-29-2287-2011 Geophysicae © Author(s) 2011. CC Attribution 3.0 License. Interhemispheric comparison of GPS phase scintillation at high latitudes during the magnetic-cloud-induced geomagnetic storm of 5–7 April 2010 P. Prikryl1, L. Spogli2, P. T. Jayachandran3, J. Kinrade4, C. N. Mitchell4, B. Ning5, G. Li5, P. J. Cilliers6, M. Terkildsen7, D. W. Danskin8, E. Spanswick9, E. Donovan9, A. T. Weatherwax10, W. A. Bristow11, L. Alfonsi2, G. De Franceschi2, V. Romano2, C. M. Ngwira6, and B. D. L. Opperman6 1Communications Research Centre Canada, Ottawa, ON, Canada 2Istituto Nazionale di Geofisica e Vulcanologia, Rome, Italy 3Physics Department, University of New Brunswick, Fredericton, NB, Canada 4Department of Electronic and Electrical Engineering, University of Bath, Bath, UK 5Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing, China 6South African National Space Agency, Hermanus, South Africa 7IPS Radio and Space Services, Bureau of Meteorology, Haymarket, NSW, Australia 8Geomagnetic Laboratory, Natural Resources Canada, ON, Canada 9Department of Physics and Astronomy, University of Calgary, AB, Canada 10Department of Physics and Astronomy, Siena College, Loudonville, NY, USA 11Geophysical Institute, University of Alaska Fairbanks, Fairbanks, AK, USA Received: 1 September 2011 – Revised: 2 December 2011 – Accepted: 9 December 2011 – Published: 21 December 2011 Abstract. Arrays of GPS Ionospheric Scintillation and TEC while it was significantly higher in Cambridge Bay (77.0◦ N; Monitors (GISTMs) are used in a comparative scintillation 310.1◦ E) than at Mario Zucchelli (80.0◦ S; 307.7◦ E). In the study focusing on quasi-conjugate pairs of GPS receivers in polar cap, when the interplanetary magnetic field (IMF) was the Arctic and Antarctic. -
Prediction of Geomagnetically Induced Currents
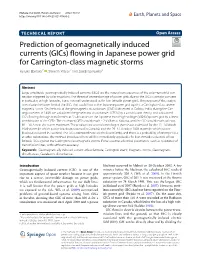
Ebihara et al. Earth, Planets and Space (2021) 73:163 https://doi.org/10.1186/s40623-021-01493-2 TECHNICAL REPORT Open Access Prediction of geomagnetically induced currents (GICs) fowing in Japanese power grid for Carrington-class magnetic storms Yusuke Ebihara1* , Shinichi Watari2 and Sandeep Kumar3 Abstract Large-amplitude geomagnetically induced currents (GICs) are the natural consequences of the solar–terrestrial con- nection triggered by solar eruptions. The threat of severe damage of power grids due to the GICs is a major concern, in particular, at high latitudes, but is not well understood as for low-latitude power grids. The purpose of this study is to evaluate the lower limit of the GICs that could fow in the Japanese power grid against a Carrington-class severe magnetic storm. On the basis of the geomagnetic disturbances (GMDs) observed at Colaba, India, during the Car- rington event in 1859, we calculated the geoelectric disturbances (GEDs) by a convolution theory, and calculated GICs fowing through transformers at 3 substations in the Japanese extra-high-voltage (500-kV) power grid by a linear combination of the GEDs. The estimated GEDs could reach ~ 2.5 V/km at Kakioka, and the GICs could reach, at least, 89 30 A near the storm maximum. These values are several times larger than those estimated for the 13–14 March 1989± storm (in which power blackout occurred in Canada), and the 29–31 October 2003 storm (in which power blackout occurred in Sweden). The GICs estimated here are the lower limits, and there is a probability of stronger GICs at other substations. -

Introduction to Geomagnetic Fields
INTRODUCTION TO GEOMAGNETIC FIELDS Second Edition WALLACE H. CAMPBELL PUBLISHED BY THE PRESS SYNDICATE OF THE UNIVERSITY OF CAMBRIDGE The Pitt Building, Trumpington Street, Cambridge, United Kingdom CAMBRIDGE UNIVERSITY PRESS The Edinburgh Building, Cambridge CB2 2RU, UK 40 West 20th Street, New York, NY 10011-4211, USA 477 Williamstown Road, Port Melbourne, VIC 3207, Australia Ruizde Alarc´on 13, 28014 Madrid, Spain Dock House, The Waterfront, Cape Town 8001, South Africa http://www.cambridge.org C Wallace H. Campbell 1997, 2003 This book is in copyright. Subject to statutory exception and to the provisions of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published 1997 Second edition 2003 Printed in the United Kingdom at the University Press, Cambridge Typefaces Times Roman 10/13 pt and Stone Sans System LATEX2ε [] A catalog record for this book is available from the British Library Library of Congress Cataloging in Publication data ISBN 0 521 82206 8 hardback ISBN 0 521 52953 0 paperback Contents Preface page ix Acknowledgements xii 1 The Earth’s main field 1 1.1 Introduction 1 1.2 Magnetic Components 4 1.3 Simple Dipole Field 8 1.4 Full Representation of the Main Field 15 1.5 Features of the Main Field 34 1.6 Charting the Field 41 1.7 Field Values for Modeling 47 1.8 Earth’s Interior as a Source 51 1.9 Paleomagnetism 58 1.10 Planetary Fields 62 1.11 Main Field Summary 63 1.12 Exercises 65 2 Quiet-time field variations and dynamo -
Beidou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal B2b (Version 1.0)
China Satellite Navigation Office 2020 BeiDou Navigation Satellite System Signal In Space Interface Control Document Open Service Signal B2b (Version 1.0) China Satellite Navigation Office July, 2020 China Satellite Navigation Office 2020 TABLE OF CONTENTS 1 Statement ····························································································· 1 2 Scope ·································································································· 2 3 BDS Overview ······················································································· 3 3.1 Space Constellation ········································································· 3 3.2 Coordinate System ·········································································· 3 3.3 Time System ················································································· 4 4 Signal Characteristics ··············································································· 5 4.1 Signal Structure ·············································································· 5 4.2 Signal Modulation ··········································································· 5 4.3 Logic Levels ·················································································· 6 4.4 Signal Polarization ·········································································· 6 4.5 Carrier Phase Noise ········································································· 6 4.6 Spurious ·······················································································