Arxiv:1710.02996V5 [Math.CO] 21 May 2018 Solutions of Problem II Such That A1 + A2 + ··· + an = 3N − 6, and Triangulations of N-Gons
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Islamic Geometric Ornaments in Istanbul
►SKETCH 2 CONSTRUCTIONS OF REGULAR POLYGONS Regular polygons are the base elements for constructing the majority of Islamic geometric ornaments. Of course, in Islamic art there are geometric ornaments that may have different genesis, but those that can be created from regular polygons are the most frequently seen in Istanbul. We can also notice that many of the Islamic geometric ornaments can be recreated using rectangular grids like the ornament in our first example. Sometimes methods using rectangular grids are much simpler than those based or regular polygons. Therefore, we should not omit these methods. However, because methods for constructing geometric ornaments based on regular polygons are the most popular, we will spend relatively more time explor- ing them. Before, we start developing some concrete constructions it would be worthwhile to look into a few issues of a general nature. As we have no- ticed while developing construction of the ornament from the floor in the Sultan Ahmed Mosque, these constructions are not always simple, and in order to create them we need some knowledge of elementary geometry. On the other hand, computer programs for geometry or for computer graphics can give us a number of simpler ways to develop geometric fig- ures. Some of them may not require any knowledge of geometry. For ex- ample, we can create a regular polygon with any number of sides by rotat- ing a point around another point by using rotations 360/n degrees. This is a very simple task if we use a computer program and the only knowledge of geometry we need here is that the full angle is 360 degrees. -

Framing Cyclic Revolutionary Emergence of Opposing Symbols of Identity Eppur Si Muove: Biomimetic Embedding of N-Tuple Helices in Spherical Polyhedra - /
Alternative view of segmented documents via Kairos 23 October 2017 | Draft Framing Cyclic Revolutionary Emergence of Opposing Symbols of Identity Eppur si muove: Biomimetic embedding of N-tuple helices in spherical polyhedra - / - Introduction Symbolic stars vs Strategic pillars; Polyhedra vs Helices; Logic vs Comprehension? Dynamic bonding patterns in n-tuple helices engendering n-fold rotating symbols Embedding the triple helix in a spherical octahedron Embedding the quadruple helix in a spherical cube Embedding the quintuple helix in a spherical dodecahedron and a Pentagramma Mirificum Embedding six-fold, eight-fold and ten-fold helices in appropriately encircled polyhedra Embedding twelve-fold, eleven-fold, nine-fold and seven-fold helices in appropriately encircled polyhedra Neglected recognition of logical patterns -- especially of opposition Dynamic relationship between polyhedra engendered by circles -- variously implying forms of unity Symbol rotation as dynamic essential to engaging with value-inversion References Introduction The contrast to the geocentric model of the solar system was framed by the Italian mathematician, physicist and philosopher Galileo Galilei (1564-1642). His much-cited phrase, " And yet it moves" (E pur si muove or Eppur si muove) was allegedly pronounced in 1633 when he was forced to recant his claims that the Earth moves around the immovable Sun rather than the converse -- known as the Galileo affair. Such a shift in perspective might usefully inspire the recognition that the stasis attributed so widely to logos and other much-valued cultural and heraldic symbols obscures the manner in which they imply a fundamental cognitive dynamic. Cultural symbols fundamental to the identity of a group might then be understood as variously moving and transforming in ways which currently elude comprehension. -

Polygon Review and Puzzlers in the Above, Those Are Names to the Polygons: Fill in the Blank Parts. Names: Number of Sides
Polygon review and puzzlers ÆReview to the classification of polygons: Is it a Polygon? Polygons are 2-dimensional shapes. They are made of straight lines, and the shape is "closed" (all the lines connect up). Polygon Not a Polygon Not a Polygon (straight sides) (has a curve) (open, not closed) Regular polygons have equal length sides and equal interior angles. Polygons are named according to their number of sides. Name of Degree of Degree of triangle total angles regular angles Triangle 180 60 In the above, those are names to the polygons: Quadrilateral 360 90 fill in the blank parts. Pentagon Hexagon Heptagon 900 129 Names: number of sides: Octagon Nonagon hendecagon, 11 dodecagon, _____________ Decagon 1440 144 tetradecagon, 13 hexadecagon, 15 Do you see a pattern in the calculation of the heptadecagon, _____________ total degree of angles of the polygon? octadecagon, _____________ --- (n -2) x 180° enneadecagon, _____________ icosagon 20 pentadecagon, _____________ These summation of angles rules, also apply to the irregular polygons, try it out yourself !!! A point where two or more straight lines meet. Corner. Example: a corner of a polygon (2D) or of a polyhedron (3D) as shown. The plural of vertex is "vertices” Test them out yourself, by drawing diagonals on the polygons. Here are some fun polygon riddles; could you come up with the answer? Geometry polygon riddles I: My first is in shape and also in space; My second is in line and also in place; My third is in point and also in line; My fourth in operation but not in sign; My fifth is in angle but not in degree; My sixth is in glide but not symmetry; Geometry polygon riddles II: I am a polygon all my angles have the same measure all my five sides have the same measure, what general shape am I? Geometry polygon riddles III: I am a polygon. -
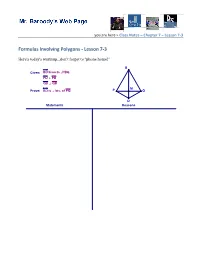
Formulas Involving Polygons - Lesson 7-3
you are here > Class Notes – Chapter 7 – Lesson 7-3 Formulas Involving Polygons - Lesson 7-3 Here’s today’s warmup…don’t forget to “phone home!” B Given: BD bisects ∠PBQ PD ⊥ PB QD ⊥ QB M Prove: BD is ⊥ bis. of PQ P Q D Statements Reasons Honors Geometry Notes Today, we started by learning how polygons are classified by their number of sides...you should already know a lot of these - just make sure to memorize the ones you don't know!! Sides Name 3 Triangle 4 Quadrilateral 5 Pentagon 6 Hexagon 7 Heptagon 8 Octagon 9 Nonagon 10 Decagon 11 Undecagon 12 Dodecagon 13 Tridecagon 14 Tetradecagon 15 Pentadecagon 16 Hexadecagon 17 Heptadecagon 18 Octadecagon 19 Enneadecagon 20 Icosagon n n-gon Baroody Page 2 of 6 Honors Geometry Notes Next, let’s look at the diagonals of polygons with different numbers of sides. By drawing as many diagonals as we could from one diagonal, you should be able to see a pattern...we can make n-2 triangles in a n-sided polygon. Given this information and the fact that the sum of the interior angles of a polygon is 180°, we can come up with a theorem that helps us to figure out the sum of the measures of the interior angles of any n-sided polygon! Baroody Page 3 of 6 Honors Geometry Notes Next, let’s look at exterior angles in a polygon. First, consider the exterior angles of a pentagon as shown below: Note that the sum of the exterior angles is 360°. -

( ) Methods for Construction of Odd Number Pointed
Daniel DOBRE METHODS FOR CONSTRUCTION OF ODD NUMBER POINTED POLYGONS Abstract: The purpose of this paper is to present methods for constructing of polygons with an odd number of sides, although some of them may not be built only with compass and straightedge. Odd pointed polygons are difficult to construct accurately, though there are relatively simple ways of making a good approximation which are accurate within the normal working tolerances of design practitioners. The paper illustrates rather complicated constructions to produce unconstructible polygons with an odd number of sides, constructions that are particularly helpful for engineers, architects and designers. All methods presented in this paper provide practice in geometric representations. Key words: regular polygon, pentagon, heptagon, nonagon, hendecagon, pentadecagon, heptadecagon. 1. INTRODUCTION n – number of sides; Ln – length of a side; For a specialist inured to engineering graphics, plane an – apothem (radius of inscribed circle); and solid geometries exert a special fascination. Relying R – radius of circumscribed circle. on theorems and relations between linear and angular sizes, geometry develops students' spatial imagination so 2. THREE - POINT GEOMETRY necessary for understanding other graphic discipline, descriptive geometry, underlying representations in The construction for three point geometry is shown engineering graphics. in fig. 1. Given a circle with center O, draw the diameter Construction of regular polygons with odd number of AD. From the point D as center and, with a radius in sides, just by straightedge and compass, has preoccupied compass equal to the radius of circle, describe an arc that many mathematicians who have found ingenious intersects the circle at points B and C. -

Farey Error Correcting Coding Text, Data and Images
International Journal of Applied Engineering Research ISSN 0973-4562 Volume 14, Number 9 (2019) pp. 2207-2211 © Research India Publications. http://www.ripublication.com Farey Error Correcting Coding Text, Data and Images Poornima M1 , S. Jagannathan2, R Chandrasekhar3, S.T. Kumara4 1 Mathematics Department , SJB Institute of Technology, Bangalore, Karnataka, India. 2 Computer Science & Engineering Department, Nagarjuna College of Engineering & Technology, Bangalore, Karnataka, India. 3 MCA Department, PESIT Research, Bangalore, Karnataka, India. 4 A P S College of Engineering, Bangalore, 560082, Karnataka, India. Abstract: 2. PRINCIPLES AND AXIOMS OF THE FAREY SEQUENCE A new scheme for encryption and decryption of plain text, data and the coding of medical images through Farey Farey Sequences for Farey1...Farey8 which are irreducible or Sequence is brought in the paper. It proposes the reduced simple decimal division quantities in [0, 1] for a given n is arithmetic point representations and more of integer and given below. whole number point implementations. The test case and Farey1 = [ 0/1, 1/1 ] outcomes are explained in the section 4 and 5. Farey2 = [ 0/1, ½, 1/1 ] Keywords: Error correcting codes, image coding, reduced arithmetic floating point, fixed point, digital signal Farey3 = [ 0/1, 1/3, ½, 2/3, 1/1 ] processing and farey sequences Farey4 = [0/1, ¼, 1/3, ½, 2/3, ¾, 1/1] Farey5 = [ 0/1,1/5 ,1/4, 1/3, 2/5, 1/2 ,3/5, 2/3, 4/5, 1/1] 1. INTRODUCTION The efficacy of Farey sequence applications for error correcting codes and image processing are brings out in the Farey6 = [ 0/1, 1/6,/5, ¼, 1/3, 2/5, ½, 3/5, 2/3, ¾, 4/5, paper. -

Polygons and Convexity
Geometry Week 4 Sec 2.5 to ch. 2 test section 2.5 Polygons and Convexity Definitions: convex set – has the property that any two of its points determine a segment contained in the set concave set – a set that is not convex concave concave convex convex concave Definitions: polygon – a simple closed curve that consists only of segments side of a polygon – one of the segments that defines the polygon vertex – the endpoint of the side of a polygon 1 angle of a polygon – an angle with two properties: 1) its vertex is a vertex of the polygon 2) each side of the angle contains a side of the polygon polygon not a not a polygon (called a polygonal curve) polygon Definitions: polygonal region – a polygon together with its interior equilateral polygon – all sides have the same length equiangular polygon – all angels have the same measure regular polygon – both equilateral and equiangular Example: A square is equilateral, equiangular, and regular. 2 diagonal – a segment that connects 2 vertices but is not a side of the polygon C B C B D A D A E AC is a diagonal AC is a diagonal AB is not a diagonal AD is a diagonal AB is not a diagonal Notation: It does not matter which vertex you start with, but the vertices must be listed in order. Above, we have square ABCD and pentagon ABCDE. interior of a convex polygon – the intersection of the interiors of is angles exterior of a convex polygon – union of the exteriors of its angles 3 Polygon Classification Number of sides Name of polygon 3 triangle 4 quadrilateral 5 pentagon 6 hexagon 7 heptagon 8 octagon -

Multidimensional Farey Partitions by Arnaldo Nogueira a and Bruno
Indag. Mathem., N.S., 17 (3), 437-456 September 25, 2006 Multidimensional Farey partitions by Arnaldo Nogueira a and Bruno Sevennec b a Institut de Math~matiques de Luminy, 163, avenue de Luminy, 13288 Marseille, Cedex 9, France b Unit~ de MathOmatiques Pures etAppliquOes, Ecole Normale Sup&ieure de Lyon, 46, allOe d'Italie, 69364 Lyon, Cedex 7, France Communicated by Prof. R. Tijdeman at the meeting of October 31, 2005 ABSTRACT The linear action of SLfn, Z+) induces lattice partitions on the (n - 1)-dimensional simplex An-b The notion of Farev partition raises naturally from a matricial interpretation of the arithmetical Farey sequence of order r. Such sequence is unique and, consequently, the Fareypartition of order r on Al is unique. In higher dimension no generalized Farey partition is unique. Nevertheless in dimension 3 the number of triangles in the various generalized Farey partitions is always the same which fails to be true in dimension n > 3. Concerning Diophantine approximations, it turns out that the vertices of an n-dimensional Farey partition of order r are the radial projections of the lattice points in Zn~ N [0, r] n whose coordinates are relatively prime. Moreover, we obtain sequences of multidimensional Farey partitions which converge pointwisely. 1. INTRODUCTION The Farey or intermediate fractions are our motivation. We introduce the notion of matricial Farey tree, where matrices of the unimodular group replace the fractions. The matricial approach generalizes to higher dimension the so-called Farey sequence of order r (Hardy and Wright [6, p. 23]). For r 6 N = {1, 2 ... -

Farey Fractions
U.U.D.M. Project Report 2017:24 Farey Fractions Rickard Fernström Examensarbete i matematik, 15 hp Handledare: Andreas Strömbergsson Examinator: Jörgen Östensson Juni 2017 Department of Mathematics Uppsala University Farey Fractions Uppsala University Rickard Fernstr¨om June 22, 2017 1 1 Introduction The Farey sequence of order n is the sequence of all reduced fractions be- tween 0 and 1 with denominator less than or equal to n, arranged in order of increasing size. The properties of this sequence have been thoroughly in- vestigated over the years, out of intrinsic interest. The Farey sequences also play an important role in various more advanced parts of number theory. In the present treatise we give a detailed development of the theory of Farey fractions, following the presentation in Chapter 6.1-2 of the book MNZ = I. Niven, H. S. Zuckerman, H. L. Montgomery, "An Introduction to the Theory of Numbers", fifth edition, John Wiley & Sons, Inc., 1991, but filling in many more details of the proofs. Note that the definition of "Farey sequence" and "Farey fraction" which we give below is apriori different from the one given above; however in Corollary 7 we will see that the two definitions are in fact equivalent. 2 Farey Fractions and Farey Sequences We will assume that a fraction is the quotient of two integers, where the denominator is positive (every rational number can be written in this way). A reduced fraction is a fraction where the greatest common divisor of the 3:5 7 numerator and denominator is 1. E.g. is not a fraction, but is both 4 8 a fraction and a reduced fraction (even though we would normally say that 3:5 7 −1 0 = ). -

Volume 2 Shape and Space
Volume 2 Shape and Space Colin Foster Introduction Teachers are busy people, so I’ll be brief. Let me tell you what this book isn’t. • It isn’t a book you have to make time to read; it’s a book that will save you time. Take it into the classroom and use ideas from it straight away. Anything requiring preparation or equipment (e.g., photocopies, scissors, an overhead projector, etc.) begins with the word “NEED” in bold followed by the details. • It isn’t a scheme of work, and it isn’t even arranged by age or pupil “level”. Many of the ideas can be used equally well with pupils at different ages and stages. Instead the items are simply arranged by topic. (There is, however, an index at the back linking the “key objectives” from the Key Stage 3 Framework to the sections in these three volumes.) The three volumes cover Number and Algebra (1), Shape and Space (2) and Probability, Statistics, Numeracy and ICT (3). • It isn’t a book of exercises or worksheets. Although you’re welcome to photocopy anything you wish, photocopying is expensive and very little here needs to be photocopied for pupils. Most of the material is intended to be presented by the teacher orally or on the board. Answers and comments are given on the right side of most of the pages or sometimes on separate pages as explained. This is a book to make notes in. Cross out anything you don’t like or would never use. Add in your own ideas or references to other resources. -

Tessellations: Lessons for Every Age
TESSELLATIONS: LESSONS FOR EVERY AGE A Thesis Presented to The Graduate Faculty of The University of Akron In Partial Fulfillment of the Requirements for the Degree Master of Science Kathryn L. Cerrone August, 2006 TESSELLATIONS: LESSONS FOR EVERY AGE Kathryn L. Cerrone Thesis Approved: Accepted: Advisor Dean of the College Dr. Linda Saliga Dr. Ronald F. Levant Faculty Reader Dean of the Graduate School Dr. Antonio Quesada Dr. George R. Newkome Department Chair Date Dr. Kevin Kreider ii ABSTRACT Tessellations are a mathematical concept which many elementary teachers use for interdisciplinary lessons between math and art. Since the tilings are used by many artists and masons many of the lessons in circulation tend to focus primarily on the artistic part, while overlooking some of the deeper mathematical concepts such as symmetry and spatial sense. The inquiry-based lessons included in this paper utilize the subject of tessellations to lead students in developing a relationship between geometry, spatial sense, symmetry, and abstract algebra for older students. Lesson topics include fundamental principles of tessellations using regular polygons as well as those that can be made from irregular shapes, symmetry of polygons and tessellations, angle measurements of polygons, polyhedra, three-dimensional tessellations, and the wallpaper symmetry groups to which the regular tessellations belong. Background information is given prior to the lessons, so that teachers have adequate resources for teaching the concepts. The concluding chapter details results of testing at various age levels. iii ACKNOWLEDGEMENTS First and foremost, I would like to thank my family for their support and encourage- ment. I would especially like thank Chris for his patience and understanding. -
Parallelogram Rhombus Nonagon Hexagon Icosagon Tetrakaidecagon Hexakaidecagon Quadrilateral Ellipse Scalene T
Call List parallelogram rhombus nonagon hexagon icosagon tetrakaidecagon hexakaidecagon quadrilateral ellipse scalene triangle square rectangle hendecagon pentagon dodecagon decagon trapezium / trapezoid right triangle equilateral triangle circle octagon heptagon isosceles triangle pentadecagon triskaidecagon Created using www.BingoCardPrinter.com B I N G O parallelogram tetrakaidecagon square dodecagon circle rhombus hexakaidecagon rectangle decagon octagon Free trapezium / nonagon quadrilateral heptagon Space trapezoid right isosceles hexagon hendecagon ellipse triangle triangle scalene equilateral icosagon pentagon pentadecagon triangle triangle Created using www.BingoCardPrinter.com B I N G O pentagon rectangle pentadecagon triskaidecagon hexakaidecagon equilateral scalene nonagon parallelogram circle triangle triangle isosceles Free trapezium / octagon triangle Space square trapezoid ellipse heptagon rhombus tetrakaidecagon icosagon right decagon hendecagon dodecagon hexagon triangle Created using www.BingoCardPrinter.com B I N G O right decagon triskaidecagon hendecagon dodecagon triangle trapezium / scalene pentagon square trapezoid triangle circle Free tetrakaidecagon octagon quadrilateral ellipse Space isosceles parallelogram hexagon hexakaidecagon nonagon triangle equilateral pentadecagon rectangle icosagon heptagon triangle Created using www.BingoCardPrinter.com B I N G O equilateral trapezium / pentagon pentadecagon dodecagon triangle trapezoid rectangle rhombus quadrilateral nonagon octagon isosceles Free scalene hendecagon