What Artificial Neural Networks Can Learn from Animal Brains
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Φ-Features in Animal Cognition
φ-Features in Animal Cognition Chris Golston This paper argues that the core φ-features behind grammatical person, number, and gender are widely used in animal cognition and are in no way limited to humans or to communication. Based on this, it is hypothesized (i) that the semantics behind φ-features were fixed long before primates evolved, (ii) that most go back as far as far as vertebrates, and (iii) that some are shared with insects and plants. Keywords: animal cognition; gender; number; person 1. Introduction Bickerton claims that language is ill understood as a communication system: [F]or most of us, language seems primarily, or even exclusively, to be a means of communication. But it is not even primarily a means of communication. Rather, it is a system of representation, a means for sorting and manipulating the plethora of information that deluges us throughout our waking life. (Bickerton 1990: 5) As Berwick & Chomsky (2016: 102) put it recently “language is fundamentally a system of thought”. Since much of our system of representation seems to be shared with other animals, it has been argued that we should “search for the ancestry of language not in prior systems of animal communication, but in prior representational systems” (Bickerton 1990: 23). In support of this, I provide evidence that all the major φ-features are shared with primates, most with vertebrates, and some with plants; and that there are no φ-features whose semantics are unique to humans. Specifically human categories, including all things that vary across human cultures, seem to I’d like to thank Steve Adisasmito-Smith, Charles Ettner, Sean Fulop, Steven Moran, Nadine Müller, three anonymous reviewers for EvoLang, two anonymous reviewers for Biolinguistics and Kleanthes Grohmann for help in identifying weakness in earlier drafts, as well as audiences at California State University Fresno, Marburg Universität, and Universitetet i Tromsø for helpful discussion. -

Ecotourism As a Means of Encouraging Ecological Recovery in the Flinders Ranges, South Australia
ECOTOURISM AS A MEANS OF ENCOURAGING ECOLOGICAL RECOVERY IN THE FLINDERS RANGES, SOUTH AUSTRALIA By Emily Moskwa A thesis submitted in fulfilment of the degree of Doctor of Philosophy Discipline of Geographical and Environmental Studies School of Social Sciences Faculty of Humanities and Social Sciences The University of Adelaide May 2008 ii TABLE OF CONTENTS List of Figures………………………………………………………………………………….…….....v List of Tables…………………………………………………………………………………….….....vi Abstract………………………………………………………………………………………….……viii Acknowledgements…………………………………………………………………………….………ix Declaration……………………………………………………………………………………….……..x Section I: Preliminaries 1.0 INTRODUCTION .............................................................................. 2 1.1 Introduction ............................................................................................................... 2 1.2 Conceptual Basis for Thesis ...................................................................................... 2 1.3 Research Questions ................................................................................................... 3 1.4 Specific Objectives .................................................................................................... 5 1.5 Justifications for Research ........................................................................................ 6 1.6 Structure of the Thesis .............................................................................................. 8 1.7 Conclusion ................................................................................................................ -
![Downloaded by [New York University] at 06:54 14 August 2016 Classic Case Studies in Psychology](https://docslib.b-cdn.net/cover/8368/downloaded-by-new-york-university-at-06-54-14-august-2016-classic-case-studies-in-psychology-738368.webp)
Downloaded by [New York University] at 06:54 14 August 2016 Classic Case Studies in Psychology
Downloaded by [New York University] at 06:54 14 August 2016 Classic Case Studies in Psychology The human mind is both extraordinary and compelling. But this is more than a collection of case studies; it is a selection of stories that illustrate some of the most extreme forms of human behaviour. From the leader who convinced his followers to kill themselves to the man who lost his memory; from the boy who was brought up as a girl to the woman with several personalities, Geoff Rolls illustrates some of the most fundamental tenets of psychology. Each case study has provided invaluable insights for scholars and researchers, and amazed the public at large. Several have been the inspiration for works of fiction, for example the story of Kim Peek, the real Rain Man. This new edition features three new case studies, including the story of Charles Decker who was tried for the attempted murder of two people but acquitted on the basis of a neurological condition, and Dorothy Martin, whose persisting belief in an impending alien invasion is an illuminating example of cognitive dissonance. In addition, each case study is contextualized with more typical behaviour, while the latest thinking in each sub-field is also discussed. Classic Case Studies in Psychology is accessibly written and requires no prior knowledge of psychology, but simply an interest in the human condition. It is a book that will amaze, sometimes disturb, but above all enlighten its readers. Downloaded by [New York University] at 06:54 14 August 2016 Geoff Rolls is Head of Psychology at Peter Symonds College in Winchester and formerly a Research Fellow at Southampton University, UK. -

An Open Introduction to Logic
For All X The Lorain County Remix P.D. Magnus University at Albany, State University of New York and Cathal Woods Virginia Wesleyan University and J. Robert Loftis Lorain County Community College Licensed under a Creative Commons license. (Attribution-NonComercial-ShareAlike 4.0 International ) https://creativecommons.org/licenses/by-nc-sa/4.0/ This is version 0.1 of An Open Introduction to Logic. It is current as of December 22, 2017. © 2005{2017 by Cathal Woods, P.D. Magnus, and J. Robert Loftis. Some rights reserved. Licensed under a Creative Commons license. (Attribution-NonComercial-ShareAlike 4.0 International ) https://creativecommons.org/licenses/by-nc-sa/4.0/ This book incorporates material from An Introduction to Reasoning by Cathal Woods, available at sites.google.com/site/anintroductiontoreasoning/ and For All X by P.D. Magnus (version 1.27 [090604]), available at www.fecundity.com/logic. Introduction to Reasoning © 2007{2014 by Cathal Woods. Some rights reserved. Licensed under a Creative Commons license: Attribution-NonCommercial-ShareAlike 3.0 Unported. http://creativecommons.org/licenses/by-nc-sa/3.0/ For All X © 2005{2010 by P.D. Magnus. Some rights reserved. Licensed under a Creative Commons license: Attribution ShareAlike http://creativecommons.org/licenses/by-sa/3.0/ J. Robert Loftis compiled this edition and wrote original material for it. He takes full responsibility for any mistakes remaining in this version of the text. Typesetting was carried out entirely in LATEX2". The style for typesetting proofs is based on fitch.sty (v0.4) by Peter Selinger, University of Ottawa. \When you come to any passage you don't understand, read it again: if you still don't understand it, read it again: if you fail, even after three readings, very likely your brain is getting a little tired. -

Current Topics of Business Policy Readings
Current Topics of Business Policy (E/A/M 21871, IBE 21149) Benito Arruñada Universitat Pompeu Fabra Readings Table of contents 1. Behavior — Due: week 1 2. Contracting — Due: week 2 3. Public sector reform — Due: week 3 4. Other topics — Due: week 4 5. Professional career — Due: TBA 6. E-business — Due: 1st class on e-business 7. Tools — Due: project preparation 1. Behavior — Due: week 1 References: Pinker, Steven (1997), “Standard Equipment,” chapter 1 of How the Mind Works, Norton, New York, 3-58. Stark, Rodney (1996), “Conversion and Christian Growth,” in The Rise of Christianity: A Sociologist Reconsiders History, Princeton University Press, Princeton, 2-27. Pinker, Steven (2002), The Blank Slate: The Modern Denial of Human Nature, Viking, New York, pp. on stereotypes (201-207). Mullainathan, Sendhil, and Andrei Shleifer (2005), “The Market for News,” American Economic Review, 95(4), 1031-53. Luscombe, Belinda (2013), “Confidence Woman,” Time, March 7. PENGUIN BOOKS Published by the Penguin Group Penguin Books Ltd, 27 Wrights Lane, London W8 5TZ, England Penguin Putnam Inc., 375 Hudson Street, New York, New York 10014, USA Penguin Books Australia Ltd, Ringwood, Victoria, Australia Penguin Books Canada Ltd, 10 Alcorn Avenue, Toronto, Ontario, Canada M4V 3B2 HOW Penguin Books (NZ) Ltd, 182-190 Wairau Road, Auckland 10, New Zealand Penguin Books Ltd, Registered Offices: Harmondsworth, Middlesex, England First published in the USA by W. W. Norton 1997 First published in Great Britain by Allen Lane The Penguin Press 1998 THE MIND Published -

FY 2018 Annual Report on Technology Transfer
Disclaimers Use of commercial and trade names does not imply approval or constitute endorsement by USDA. In accordance with Federal civil rights law and U.S. Department of Agriculture (USDA) civil rights regulations and policies, the USDA, its Agencies, offices, and employees, and institutions participating in or administering USDA programs are prohibited from discriminating based on race, color, national origin, religion, sex, gender identity (including gender expression), sexual orientation, disability, age, marital status, family/parental status, income derived from a public assistance program, political beliefs, or reprisal or retaliation for prior civil rights activity, in any program or activity conducted or funded by USDA (not all bases apply to all programs). Remedies and complaint filing deadlines vary by program or incident. Persons with disabilities who require alternative means of communication for program information (e.g., Braille, large print, audiotape, American Sign Language, etc.) should contact the responsible Agency or USDA's TARGET Center at (202) 720-2600 (voice and TTY) or contact USDA through the Federal Relay Service at (800) 877-8339. Additionally, program information may be made available in languages other than English. To file a program discrimination complaint, complete the USDA Program Discrimination Complaint Form, AD-3027, found online at How to File a Program Discrimination Complaint and at any USDA office or write a letter addressed to USDA and provide in the letter all of the information requested in the form. To request a copy of the complaint form, call (866) 632-9992. Submit your completed form or letter to USDA by: (1) mail: U.S. Department of Agriculture, Office of the Assistant Secretary for Civil Rights, 1400 Independence Avenue, SW, Washington, D.C. -
Deliver Us from Evil
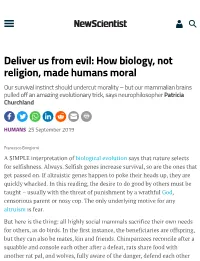
Deliver us from evil: How biology, not religion, made humans moral Our survival instinct should undercut morality – but our mammalian brains pulled off an amazing evolutionary trick, says neurophilosopher Patricia Churchland HUMANS 25 September 2019 Francesco Bongiorni A SIMPLE interpretation of biological evolution says that nature selects for selfishness. Always. Selfish genes increase survival, so are the ones that get passed on. If altruistic genes happen to poke their heads up, they are quickly whacked. In this reading, the desire to do good by others must be taught – usually with the threat of punishment by a wrathful God, censorious parent or nosy cop. The only underlying motive for any altruism is fear. But here is the thing: all highly social mammals sacrifice their own needs for others, as do birds. In the first instance, the beneficiaries are offspring, but they can also be mates, kin and friends. Chimpanzees reconcile after a squabble and console each other after a defeat, rats share food with another rat pal, and wolves, fully aware of the danger, defend each other against a grizzly bear. Male marmosets and chimpanzees have been observed to adopt orphaned young to whom they have no genetic connection. Early-hatched bluebirds help feed and guard their siblings in later broods. Humans do variants of all these things. Charles Darwin puzzled over this selflessness in his 1871 book The Descent of Man. Where does our moral sense, or conscience, something that seems to fly in the face of biology, come from? A century and a half on, advances in our understanding of evolution and neuroscience are serving up some intriguing answers. -
The Study of Instinct
The Study of Instinct Unraveling the neurobiological basis of behavior Outline • Part I: basic concepts in the study of the biological basis of behavior • Part II: modern tools for studying behavior • Part III: recent discoveries in the neurobiology of behavior; implications for human health. Motivation Outline • Part I: Basic concepts in the study of the biological basis of behavior • Part II: modern tools for studying behavior • Part III: recent discoveries in the neurobiology of behavior and implications for human health Basic concepts of behavior Behavior the total movements made by an intact animal. Innate or instinctive behaviors those that are not changed through learning. External and internal stimuli • external = things in our surrounding environment • internal = our “drives” and motivations (e.g. hunger, thirst) Two historical approaches to studying behavior Ethological approach • Pros: observe whole animal in natural environment. • Cons: subjective; lacks mechanistic insight. Neurophysiological approach • Pros: controlled experiments; rigorous and quantitative • Cons: Constrained, non- naturalistic conditions. The four Fs of evolution • Fighting • Fleeing • Feeding • And… Drive, homeostasis, and valence • Hunger, thirst, mating, sleep, thermoregulation, etc. are universal motivational drives. • Homeostasis: The regulation of biological systems such that internal conditions remain stable, at some predetermined “set point.” • Things that bring us closer to our set point take on a positive valence (good/pleasurable) • Things that move us away from our set points take on a negative valence (bad/unpleasant) Homeostasis, drive, and valence The hypothalamus contains circuits controlling our basic drives external stimuli • Hypothalamic neurons controlling basic drives integrate information from the brain and body. internal • Drive circuits coordinate the brain and stimuli body in order to produce adaptive behaviors. -
Miledown MCAT™ Review Sheets
MCAT REVIEW SHEETS Revised 2019 Please send questions or comments to: [email protected] Contents General Chemistry Biology 1 Atomic Structure 1 1 The Cell 25 2 The Periodic Table 2 2 Reproduction 26 3 Bonding and Chemical Interactions 3 3 Embryogenesis and Development 27 4 Compounds and Stoichiometry 4 4 Nervous System 28 5 Chemical Kinetics 5 5 Endocrine System 29 6 Equilibrium 6 6 Respiratory System 30 7 Thermochemistry 7 7 Cardiovascular System 31 8 The Gas Phase 8 8 Immune system 32 9 Solutions 9 9 Digestive System 33 10 Acids and Bases 10 10 Kidney and Skin 34 11 Oxidation-Reduction Reactions 11 11 Muscular System 35 12 Electrochemistry 12 12 Genetics and Evolution 36 Organic Chemistry Biochemistry 1 Nomenclature 13 1 Amino Acids, Peptides, and Proteins 37 2 Isomers 14 2 Enzymes 38 3 Bonding 15 3 Nonenzymatic Protein Function & Protein Analysis 39 4 Analyzing Organic Reactions 16 4 Carbohydrate Structure and Function 40 5 Alcohols 17 5 Lipid Structure and Function 41 6 Aldehydes and Ketones I 18 6 DNA and Biotechnology 42 7 Aldehydes and Ketones II 19 7 RNA and the Genetic Code 43 8 Carboxylic Acids 20 8 Biological Membranes 44 9 Carboxylic Acid Derivatives 21 9 Carbohydrate Metabolism I 45 10 N- and P-Containing Compounds 22 10 Carbohydrate Metabolism II 46 11 Spectroscopy 23 11 Lipid and Amino Acid Metabolism 47 12 Separations and Purifications 24 12 Bioenergetics and Regulation of Metabolism 48 i Behavioral Sciences Appendix 1 Biology and Behavior 49 A Organic Chemistry Common Names 73 2 Sensation and Perception 50 B The Heart -
The Development of Environmental Education Materials for Investigating Fire-Environment-Man Relationships: Final Report
DOCUMENT RESUME ) ED 157 713 SE 024 565 AUTHOR Hanselman, David L.; Reider, David A. TITLE The Development of Environmental EducatiOn Materials for Investigating Fire-Environment-Man Relationships: Final Report. IRSTITUTION Forest service (DOA)_ Washin'gtone D.C.: State Univ,-.? of New York, Syyacuse. Coll. of Forestry. )7. PUB DATE 78 MOTE 335p;; Not available in hard copy due.to,marginal legibility. of original document EDRS PRICE MF-$0.'83 Plus Postage. MC Not Available from EDRS. DESCRIPTORS Bibliographies; Conservation Education; *Cnrriculum Dev4lopment; *Discovery Learning; *Ecologi; *Environmental Education; *Fire Science Education; Forestry; Instructional Materials; Natural Resources; Simulation IDENTIFIERS Forest Fires; Forest Service Process Approach ABSTRACT This publication details the develogment and use of environmental education materials based on the United States Forest, Service HProcess Approach." This publication focuses on materials that teach the ecology and management of natural and man-made forest and brush fires. Alm, main body of the contents develop and document a 'rationale for environmental education and the process approach. In the sain body, a summary of the ecological_ effects of fire and tile' development andevaluation of the teaching materials is discussed. An __extensive bibliography is included. The appendices.-include:(1) the evalidifiiin-garvey-package and summary of_durveY responses; (2) a land use simulation game presently used in workshops on san-fire-environment relationships;; (3) a Slide/tape program script entitled "The Other Side of the Flame"; and (4) an analysis of simulation games. (MR) C O 0' **********************Ig************************************************ Reproductions supplied by iDRS are the best that can be made from the original document. *********************************************************************** U S DEPARTMENT "PERMISSION TO OF HEALTH. -

05614 Adcock Solutions Guide 04.Indd
Inside the mind of the consumer A guide to discovering what consumers really want Discover what consumers really want 2 A word from Phillip I love consumer psychology and behavioural science. Understanding the minds of consumers and shoppers has been my career for 25 years: It’s my passion. Throughout my career two questions the consumer mind. Inside the mind have always intrigued me: of the consumer is a straightforward reference guide to help you better • What do consumers really want? align your brand and business with • Why, when the answers are the mind of the consumer. Packed identified do so many brands with insights, advice and practical fail to deliver? tips, you can either read it all or just tap into the bits that interest you. With the consumer being the lifeblood of so many businesses, Between us, let’s make it better: we all know that we have to delight Better for our brands, better for them. But what do they really want? our businesses and better for How do we implicitly and the consumer. emotionally form meaningful affiliations with them? How can we improve our businesses to make a real difference for consumers? The answer lies in applying consumer psychology and Phillip Adcock behavioural science. In this guide Psychology & Behaviour I’ll explain some critical aspects of Change Consultant 3 Marginal gains When it comes to At the 2004 Olympic Games Great making things better, Britain won two cycling gold medals, their best performance since 1908. it’s not so much about Under Brailsford’s leadership, doing 1 thing much the cycling team continued to better, but more about improve, winning multiple world taking 100 things and championships in road, track, making each of them BMX and Mountain bike racing. -

The TELL-TALE BRAIN V. S. RAMACHANDRAN
The TELL-TALE BRAIN A Neuroscientist‘s Quest for What Makes Us Human V. S. RAMACHANDRAN W. W. NORTON & COMPANY NEW YORK LONDON Copyright © 2011 by V. S. Ramachandran All rights reserved Figure 7.1: Illustration from Animal Architecture by Karl von Frisch and Otto von Frisch, illustrations copyright © 1974 by Turid Holldobler, reprinted by permission of Harcourt, Inc. For information about permission to reproduce selections from this book, write to Permissions, W. W. Norton & Company, Inc., 500 Fifth Avenue, New York, NY 10110 Library of Congress Cataloging-in-Publication Data Ramachandran, V. S. The tell-tale brain: a neuroscientist‘s quest for what makes us human/ V. S. Ramachandran.—1st ed. p. cm. Includes bibliographical references. ISBN: 978-0-393-08058-2 1. Neurosciences—Popular works. 2. Neurology—Popular works. 3. Brain—Popular works. I. Title. RC351.A45 2011 616.8—dc22 2010044913 W. W. Norton & Company, Inc. 500 Fifth Avenue, New York, N.Y. 10110 www.wwnorton.com W. W. Norton & Company Ltd. Castle House, 75/76 Wells Street, London W1T 3QT For my mother, V. S. Meenakshi, and my father, V. M. Subramanian For Jaya Krishnan, Mani, and Diane And for my ancestral sage Bharadhwaja, who brought medicine down from the gods to mortals CONTENTS PREFACE ACKNOWLEDGMENTS INTRODUCTION NO MERE APE CHAPTER 1 PHANTOM LIMBS AND PLASTIC BRAINS CHAPTER 2 SEEING AND KNOWING CHAPTER 3 LOUD COLORS AND HOT BABES: SYNESTHESIA CHAPTER 4 THE NEURONS THAT SHAPED CIVILIZATION CHAPTER 5 WHERE IS STEVEN? THE RIDDLE OF AUTISM CHAPTER 6 THE POWER OF BABBLE: THE