Very Large Telescope Paranal Science Operations VIRCAM/VISTA User Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The European Southern Observatory Your Talk
The European Southern Observatory Your talk Your name Overview What is astronomy? ESO history What is ESO? La Silla VLT ALMA E-ELT ESO Visitor Centre | 9 October 2013 Why are we here? What is astronomy? And what it all is good for? ESO Visitor Centre | 9 October 2013 What is astronomy? Astronomy is the study of all celestial objects. It is the study of almost every property of the Universe from stars, planets and comets to the largest cosmological structures and phenomena; across the entire electromagnetic spectrum and more. It is the study of all that has been, all there is and all that there ever will be. From the effects of the smallest atoms to the appearance of the Universe on the largest scales. ESO Visitor Centre | 9 October 2013 Astronomy in the ancient world Astronomy is the oldest of the natural sciences, dating back to antiquity, with its origins in the religious, mythological, and astrological practices of the ancient civilisations. Early astronomy involved observing the regular patterns of the motions of visible celestial objects, especially the Sun, Moon, stars and naked eye observations of the planets. The changing position of the Sun along the horizon or the changing appearances of stars in the course of the year was used to establish agricultural or ritual calendars. ESO Visitor Centre | 9 October 2013 Astronomy in the ancient world Australian Aboriginals belong to the oldest continuous culture in the world, stretching back some 50 000 years… It is said that they were the first astronomers. “Emu in the sky” at Kuringai National Park, Sydney -Circa unknown ESO Visitor Centre | 9 October 2013 Astronomy in the ancient world Goseck Circle Mnajdra Temple Complex c. -

8. Adaptive Optics 299
8. Adaptive Optics 299 8.1 Introduction Adaptive Optics is absolutely essential for OWL, to concentrate the light for spectroscopy and imaging and to reach the diffraction limit on-axis or over an extended FoV. In this section we present a progressive implementation plan based on three generation of Adaptive Optics systems and, to the possible extent, the corresponding expected performance. The 1st generation AO − Single Conjugate, Ground Layer, and distributed Multi-object AO − is essentially based on Natural Guide Stars (NGSs) and makes use of the M6 Adaptive Mirror included in the Telescope optical path. The 2nd generation AO is also based on NGSs but includes a second deformable mirror (M5) conjugated at 7-8 km – Multi-Conjugate Adaptive Optics − or a post focus mirror conjugated to the telescope pupil with a much higher density of actuators -tweeter- in the case of EPICS. The 3rd generation AO makes use of single or multiple Laser Guide Stars, preferably Sodium LGSs, and should provide higher sky coverage, better Strehl ratio and correction at shorter wavelengths. More emphasis in the future will be given to the LGS assisted AO systems after having studied, simulated and demonstrated the feasibility of the proposed concepts. The performance presented for the AO systems is based on advances from today's technology in areas where we feel confident that such advances will occur (e.g. the sizes of the deformable mirrors). Even better performance could be achieved if other technologies advance at the same rate as in the past (e.g. the density of actuators for deformable mirrors). -

Position Sensing in Adaptive Optics
Position sensing in Adaptive Optics Christopher Saunter Durham University Centre for Advanced Instrumentation Durham Smart Imaging Durham Smart Imaging Active Opt ics Adappptive Optics Durham Smart Imaging Active Optics • Relaxing the mechanical rigidity of a telescope support structure • CiihillidiCompensating with actively aligned mirrors • Massive weight and cost savings over a rigid bodyyp telescope – the onlyyp practical wa y of building ELTs. • Slow – 1Hz or less Durham Smart Imaging Active Optics Sensing • Live sensing from starlight • Live sensing from a calibration source • Pre-generated look-up table of distortion vs. ppgg,pointing angle, temperature etc • CitiCritica lfl for segmen te d m irror te lescopes Durham Smart Imaging Active Optics Image credit: Robert Wagner / MAGIC / http://wwwmagic.mppmu.mpg.de/ Durham Smart Imaging Active Opt ics Adappptive Optics Durham Smart Imaging Adaptive Optics An AO system measures dynamic turbulence with a wavefront sensor and corrects it with a deformable mirror or spatial light modltdulator Durham Smart Imaging Applications of AO • Astronomy – AO is fully integral to current VLTs and future ELTs • Ophthalmology – Retinal imaging, measuring distortions • High power lasers – Intra-cavity wavefront shaping. e.g. Vulcan fusion laser (ICF) • Optical drive pickups • Microscopy • Free space optical communication • Military Durham Smart Imaging Wavefront sensors • There are many types of wavefront sensors • Shack Hartmann, Curvature, Pyramid, Point Diffraction Interferometer, Lateral Shearing -

VLT Telescope Control Software Installation and Commissioning (Pdf
VLT Telescope Control Software installation and commissioning. K. Wirenstrand, G. Chiozzi, R. Karban European Southern Observatory Karl-Schwarzschild-Strasse 2, 85748 Garching, Germany e-mail: [email protected], [email protected], [email protected] ABSTRACT Out of the four VLT Unit Telescopes, three have had first light and of those, one is in full scientific operation. So the VLT style Telescope Control Software is in regular operation on three out of four originally foreseen telescopes, and is being installed and tested on the fourth. In fact, it is actually installed and successfully operating on a whole family of ESO telescopes: the NTT, the 3.6m La Silla, the Seeing monitor telescopes on Paranal and La Silla. That means that this software is installed and running on a total of eight telescopes of different kinds, for the moment. The three Auxiliary telescopes of the VLT interferometer and the VLT Survey Telescope, now in the development phase, will join the family. Another member of the family is the Simulation Telescope, called "Control Model", at ESO headquarters in Garching. Although it cannot look at the sky (it is pure electronics and software: no mechanics and no optics) it has been, and still is, of great value. It can be reconfigured to emulate any of the actual telescopes and it is used for off-line testing of new software releases and to analyse and fix problem reports and change requests submitted from observation sites, without disturbing operation. It is also used to test instrumentation software and its interfaces with the TCS before the actual integration at the telescope. -

The Vlt Survey Telescope (Vst) Is Now a Few Months from Its Completion
TTHEHE VLVLTT SSURURVEYVEY TTELESCOPEELESCOPE:: AA SSTTAATUSTUS RREPOREPORTT THE VLT SURVEY TELESCOPE (VST) IS NOW A FEW MONTHS FROM ITS COMPLETION. THIS PAPER BRIEFLY REVIEWS THE PROJECT, ACCOUNTS FOR ITS CURRENT STATUS, ANTICIPATES THE CALENDAR OF FUTURE MILE- STONES UP TO FIRST LIGHT, AND LISTS THE SCIENTIFIC PROGRAMMES FOR THE OBSERVING TIME GUARANTEED TO THE OAC BY ESO FOR PROCUREMENT OF THE TELESCOPE. MASSIMO CAPACCIOLI1,21,2, DARIO MANCINI2, GIORGIOIORGIO SEDMAK3 1DEPARTMENT OF PHYSICAL SCIENCES, UNIVERSITY OF NAPLES “FEDERICO II”, NAPLES, ITALY 2INAF – CAPODIMONTE ASTRONOMICAL OBSERVATORY, NAPLES, ITALY 3DEPARTMENT OF ASTRONOMY, UNIVERSITY OF TRIESTE, TRIESTE, ITALY HE VLTSURVEY TELESCOPE > 5 Mega-Euros observing facility, leading in (VST; Capaccioli et al. 2003a,b) science and capable of boosting the growth is a 2.61-m diameter imaging of the OAC community. A constraint to be telescope conceived for the duly considered was the una tantum nature of Paranal Observatory to support the grant, which strongly suggested that it TtheT VLT through its wide-field capabilities would not support a regular flow of resources and to perform stand-alone survey projects. for operations and maintenance. It features a f/5.5 modified Ritchey-Chretien As a result, in July 1997 the Capodimonte optical layout, a two-lens wide-field correc- Observatory was able to present to ESO a sci- tor, with the dewar window acting as a third entific and technical proposal envisaging the lens and an optional atmospheric dispersion design, construction, and installation at the compensator, an active primary mirror, a dou- Cerro Paranal Observatory, of a new technol- ble-hexapod driven secondary mirror, and an ogy telescope with a medium aperture, spe- alt-azimuth mounting. -

Design and Manufacture of Mirrors, and Active Optics Buddy Martin
Design and manufacture of mirrors, and active optics Buddy Martin Steward Observatory Mirror Lab 1 Outline • What makes a good mirror? • Modern mirror concepts – thin solid mirrors – segmented mirrors – lightweight mirrors • Honeycomb mirrors – design – casting • Optical manufacture – requirements – aside on active optics and model fitting – fabrication • machining • polishing – measurement • interferometry • null correctors • GMT measurements 2 What makes a good mirror? (mechanical) • Fundamental requirement is to deliver a good wavefront to focal plane in almost all conditions. – Hold its shape to a fraction of a wavelength on large scales – Be smooth to a small fraction of a wavelength on small scales – Contribute little to local seeing (temperature gradients in air) • Stiffness against wind: bending stiffness ∝ Et3 – E = Young’s modulus, t = thickness • Stiffness against gravity: bending stiffness ∝ Et 2 / ρ – This puts a premium on low mass. cross-section of an 8.4 m honeycomb mirror for the Giant Magellan Telescope 3 What makes a good mirror? (thermal) • Thermal distortion: displacement = α ΔT t for “swelling” curvature = α ΔT / t for bending – α = thermal expansion coefficient, ΔT = temperature variation within mirror • “Mirror seeing” ∝ T − T a ir ≈ dTair dt ⋅τ – dTair/dt = rate of change of air temperature 2 – τ = mirror’s thermal time constant ∝ cρt / k • c = specific heat, k = thermal conductivity, t = thickness – Becomes a problem for T - Tair > ~0.3 K, τ > ~1 hr – For glass or glass-ceramics, want t < 5 cm • Bottom line: Mirror should be stiff & light, have low thermal expansion & short thermal time constant. 4 Optical telescopes 12 LBT 10 Keck VLT (4), Gemini (2), Subaru 8 MMT, Magellan (2) 6 Palomar 200 inch diameter (m) diameter 4 Mt. -

Download Chapter 3 Sample Pages
eyesskies_95.indd 553 2008-07-08 12:24:18 TECHNOLOGY TO 3 THE RESCUE ESO’S NEW TECHNOLOGY Progress in telescopic astronomy would have come to a grinding TELESCOPE The octagonal enclosure housing the European halt in the second half of the twentieth century if it weren’t for the Southern Observatory’s 3.6-metre New Technology digital revolution. Powerful computers have enabled a wealth of Telescope (NTT) at Cerro La Silla in northern Chile was a technological breakthrough new technologies that have resulted in the construction of giant when completed in 1989. The telescope chamber is venti- telescopes, perched on high mountaintops with monolithic or lated by a system of fl aps that makes the air fl ow smoothly segmented mirrors as large as swimming pools. Astronomers across the mirror, resulting in very sharp images. The NTT was also a testbed for have even devised clever ways of undoing the distorting effects fully computer-controlled alt-azimuth mounts, thin of atmospheric turbulence and of combining individual telescope mirrors, and active optics. mirrors into virtual behemoths with unsurpassed eyesight. The optical wizardry of 21st century telescope building has ushered in a completely new era of ground-based astronomical discovery. 45 eyesskies_95.indd 545 2008-07-08 12:23:26 “ Just as modern cars don’t look like Model T-Fords, current telescopes look very different from traditional instruments” THE NEW TECHNOLOGY Just as modern cars don’t look like Model T-Fords, current telescopes look very differ- TELESCOPE PEERS INTO A ent from traditional instruments like the 5-metre Hale Telescope. -

The Case for Irish Membership of the European Southern Observatory Prepared by the Institute of Physics in Ireland June 2014
The Case for Irish Membership of the European Southern Observatory Prepared by the Institute of Physics in Ireland June 2014 The Case for Irish Membership of the European Southern Observatory Contents Summary 2 European Southern Observatory Overview 3 European Extremely Large Telescope 5 Summary of ESO Telescopes and Instrumentation 6 Technology Development at ESO 7 Big Data and Energy-Efficient Computing 8 Return to Industry 9 Ireland and Space Technologies 10 Astrophysics and Ireland 13 Undergraduate Teaching 15 Outreach and Astronomy 17 Education and Training 19 ESO Membership Fee 20 Conclusions 22 References 24 1 Summary The European Southern Observatory (ESO) is universally acknowledged as being the world leading facility for observational astronomy. The astrophysics community in Ireland is united in calling for Irish membership of ESO believing that this action would strongly support the Irish government’s commitment to its STEM (science, technology, engineering and maths) agenda. An essential element of the government’s plans for the Irish economy is to substantially grow its high-tech business sector. Physics is a core part of that base, with 86,000 jobs in Ireland in this sector1 while astrophysics, in particular, is a key driver both of science interest and especially of innovation. To support this agenda, Irish scientists and engineers need access to the best research facilities and with this access comes the benefits of spin-off technology, contracts and the jobs which this can bring. ESO is currently expanding its membership to include Brazil and is considering some eastern European countries. The cost of membership will increase as more states join and as Ireland’s GDP increases. -

Adaptive Optics Facility – Control Strategy and First On-Sky Results of the Acquisition Sequence
Adaptive Optics Facility – control strategy and first on-sky results of the acquisition sequence P-Y Madec1, J. Kolb, S. Oberti, J. Paufique, P. La Penna, W. Hackenberg, H. Kuntschner, J. Argomedo, M. Kiekebusch, R. Donaldson, M. Suarez, R. Arsenault European Southern Observatory, Karl Schwarzschild Str 2, D-85748 Garching ABSTRACT The Adaptive Optics Facility is an ESO project aiming at converting Yepun, one of the four 8m telescopes in Paranal, into an adaptive telescope. This is done by replacing the current conventional secondary mirror of Yepun by a Deformable Secondary Mirror (DSM) and attaching four Laser Guide Star (LGS) Units to its centerpiece. In the meantime, two Adaptive Optics (AO) modules have been developed incorporating each four LGS WaveFront Sensors (WFS) and one tip- tilt sensor used to control the DSM at 1 kHz frame rate. The four LGS Units and one AO module (GRAAL) have already been assembled on Yepun. Besides the technological challenge itself, one critical area of AOF is the AO control strategy and its link with the telescope control, including Active Optics used to shape M1. Another challenge is the request to minimize the overhead due to AOF during the acquisition phase of the observation. This paper presents the control strategy of the AOF. The current control of the telescope is first recalled, and then the way the AO control makes the link with the Active Optics is detailed. Lab results are used to illustrate the expected performance. Finally, the overall AOF acquisition sequence is presented as well as first results obtained on sky with GRAAL. -

ESO Calendar 2019
ESO Calendar 2019 European Southern Observatory Cover January February March April May June Rendering of the Extremely Large Telescope The Small Magellanic Cloud The Cat’s Paw and the Lobster Nebulae APEX and snowy Chajnantor VISTA’s cosmic view A sky full of galaxies ALMA’s dramatic surroundings This artist’s impression displays the Extremely One of our closest neighbours, the Small Magellanic This spectacular image from the VLT Survey The slumbering Atacama Pathfinder Experiment The Visible and Infrared Survey Telescope for This image contains a plethora of astronomical ALMA is a revolutionary astronomical telescope, Large Telescope (ELT) in all its grandeur. Sitting Cloud (SMC), is a dwarf irregular galaxy 200 000 Telescope (VST) shows the Cat’s Paw (upper right) (APEX) telescope sits beneath reddened skies in Astronomy (VISTA) is located at ESO’s Paranal treats. A subtle grouping of 1000 yellowish galaxies comprising an array of 66 giant antennas observing atop Cerro Armazones, 3046 m up in the Chilean light-years away. In the southern hemisphere, the and the Lobster (lower left) Nebulae. These vivid the snow covered Chajnantor landscape. Snow Observatory in Chile. The extreme altitude and arid cluster together near the centre of the frame. at millimetre and submillimetre wavelengths. It is Atacama Desert, the ELT’s mirror will be 39 metres SMC can be seen with the naked eye. The bright displays are sites of active star formation: photons blankets not only the ground, but also the many climate make for cloudless skies and excellent Combined with large quantities of hot gas and dark situated on the breathtaking Chajnantor Plateau, at in diameter: “the world’s biggest eye on the sky.” globular star cluster, 47 Tucanae, appears to the from hot young stars excite surrounding hydrogen peaks that encircle the Chilean plateau, which also viewing conditions. -
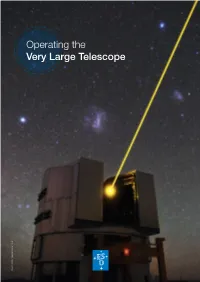
Operating the Very Large Telescope
Operating the Very Large Telescope Credit: ESO/B. Tafreshi (twanight.org) Introduction: From scientific idea to data legacy The Very Large Telescope (VLT) was built to allow European astronomers and their colleagues world- wide to perform ground-breaking research in obser- vational astronomy and cosmology. It provides them with state-of-the art facilities and instrumentation able to reach unprecedented combinations of sensi- tivity, sharpness and coverage of the ultraviolet, visible and infrared regions of the electromagnetic spectrum. More than thirteen years after science observations started, the potential of the VLT continues to be developed with innovative instrumentation and new capabilities that keep it in line with the increasing demands posed by forefront research. This ensures that it retains its leading position among ground- based astronomical facilities. Operating a complex facility like the VLT and making sure that it is able to fulfil its enormous potential is not an easy task. Its carefully designed operations scheme, which involves specialised groups of scien- tists and engineers both in Chile and in Europe, is Credit: ESO/B. Tafreshi (twanight.org) an essential component in the continued success of The ESO Very Large Telescope gets ready for a night of observing. the VLT. Science operations from end to end VLT science operations constitute a seamless pro- Germany, supported by databases that duplicate in- cess that starts when astronomers submit descrip- formation across the ocean, and other sophisticated tions of proposed observing projects intended to tools. address specific scientific objectives. After a competi- tive selection process in which the proposals are All the scientific data that are gathered and their as- peer-reviewed by experts from the community, the sociated calibrations are stored in the ESO Science approved projects are translated into a detailed de- Archive Facility. -

Key Words: Survey Telescopes, VISTA, VST, Survey Esocast Episode 74: Mapping the Southern Skies
Key words: Survey Telescopes, VISTA, VST, Survey ESOcast Episode 74: Mapping the Southern Skies 00:00 00:00 [Visuals start] [Visuals start] 1. Survey telescopes are designed to scan VST/VISTA footage/timelapses large areas of the sky quickly and deeply, looking for the rarest and most interesting astronomical objects. They use the latest technology on their scouting missions and produce huge amounts of data. ESO’s two dedicated survey telescopes are at work every clear night, carefully mapping the southern skies piece by piece. 00:32 00:00 ESOcast intro 2. This is the ESOcast! Cutting-edge science ESOcast introduction and life behind the scenes at ESO, the European Southern Observatory. 00:54 [Narrator] 3. VISTA and the VST — two powerful VST/VISTA footage survey telescopes: VISTA, the Visible and Infrared Survey Telescope for Astronomy, and the VST, the VLT Survey Telescope. 01:12 [Narrator] 4. Both telescopes are located at ESO’s Paranal Observatory Paranal Observatory in Chile and they are arguably the most powerful dedicated imaging survey telescopes in the world. 01:27 [Narrator] 5. Survey telescopes look for needles in VST/VISTA footage haystacks: rare astronomical objects, such as potentially dangerous near-Earth asteroids, hidden clusters, exploding stars and remote quasars. Unlike larger telescopes, which concentrate VISTA field, zoom in/zoom out on tiny parts of the sky in extreme detail, VISTA and the VST study broad areas of the sky. 02:00 [Narrator] 6. The resulting surveys produce huge Night sky with surveys archives of scientific data and pick up many interesting objects. These can then be studied in greater detail by much larger telescopes such as the neighbouring VLT.