Glossary of Common Gis and Gps Terms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Algebra I Chapter 1. Basic Facts from Set Theory 1.1 Glossary of Abbreviations
Notes: c F.P. Greenleaf, 2000-2014 v43-s14sets.tex (version 1/1/2014) Algebra I Chapter 1. Basic Facts from Set Theory 1.1 Glossary of abbreviations. Below we list some standard math symbols that will be used as shorthand abbreviations throughout this course. means “for all; for every” • ∀ means “there exists (at least one)” • ∃ ! means “there exists exactly one” • ∃ s.t. means “such that” • = means “implies” • ⇒ means “if and only if” • ⇐⇒ x A means “the point x belongs to a set A;” x / A means “x is not in A” • ∈ ∈ N denotes the set of natural numbers (counting numbers) 1, 2, 3, • · · · Z denotes the set of all integers (positive, negative or zero) • Q denotes the set of rational numbers • R denotes the set of real numbers • C denotes the set of complex numbers • x A : P (x) If A is a set, this denotes the subset of elements x in A such that •statement { ∈ P (x)} is true. As examples of the last notation for specifying subsets: x R : x2 +1 2 = ( , 1] [1, ) { ∈ ≥ } −∞ − ∪ ∞ x R : x2 +1=0 = { ∈ } ∅ z C : z2 +1=0 = +i, i where i = √ 1 { ∈ } { − } − 1.2 Basic facts from set theory. Next we review the basic definitions and notations of set theory, which will be used throughout our discussions of algebra. denotes the empty set, the set with nothing in it • ∅ x A means that the point x belongs to a set A, or that x is an element of A. • ∈ A B means A is a subset of B – i.e. -

Topological Paths, Cycles and Spanning Trees in Infinite Graphs
Topological Paths, Cycles and Spanning Trees in Infinite Graphs Reinhard Diestel Daniela K¨uhn Abstract We study topological versions of paths, cycles and spanning trees in in- finite graphs with ends that allow more comprehensive generalizations of finite results than their standard notions. For some graphs it turns out that best results are obtained not for the standard space consist- ing of the graph and all its ends, but for one where only its topological ends are added as new points, while rays from other ends are made to converge to certain vertices. 1Introduction This paper is part of an on-going project in which we seek to explore how standard facts about paths and cycles in finite graphs can best be generalized to infinite graphs. The basic idea is that such generalizations can, and should, involve the ends of an infinite graph on a par with its other points (vertices or inner points of edges), both as endpoints of paths and as inner points of paths or cycles. To implement this idea we define paths and cycles topologically: in the space G consisting of a graph G together with its ends, we consider arcs (homeomorphic images of [0, 1]) instead of paths, and circles (homeomorphic images of the unit circle) instead of cycles. The topological version of a spanning tree, then, will be a path-connected subset of G that contains its vertices and ends but does not contain any circles. Let us look at an example. The double ladder L shown in Figure 1 has two ends, and its two sides (the top double ray R and the bottom double ray Q) will form a circle D with these ends: in the standard topology on L (to be defined later), every left-going ray converges to ω, while every right- going ray converges to ω. -

The Boundary Manifold of a Complex Line Arrangement
Geometry & Topology Monographs 13 (2008) 105–146 105 The boundary manifold of a complex line arrangement DANIEL CCOHEN ALEXANDER ISUCIU We study the topology of the boundary manifold of a line arrangement in CP2 , with emphasis on the fundamental group G and associated invariants. We determine the Alexander polynomial .G/, and more generally, the twisted Alexander polynomial associated to the abelianization of G and an arbitrary complex representation. We give an explicit description of the unit ball in the Alexander norm, and use it to analyze certain Bieri–Neumann–Strebel invariants of G . From the Alexander polynomial, we also obtain a complete description of the first characteristic variety of G . Comparing this with the corresponding resonance variety of the cohomology ring of G enables us to characterize those arrangements for which the boundary manifold is formal. 32S22; 57M27 For Fred Cohen on the occasion of his sixtieth birthday 1 Introduction 1.1 The boundary manifold Let A be an arrangement of hyperplanes in the complex projective space CPm , m > 1. Denote by V S H the corresponding hypersurface, and by X CPm V its D H A D n complement. Among2 the origins of the topological study of arrangements are seminal results of Arnol’d[2] and Cohen[8], who independently computed the cohomology of the configuration space of n ordered points in C, the complement of the braid arrangement. The cohomology ring of the complement of an arbitrary arrangement A is by now well known. It is isomorphic to the Orlik–Solomon algebra of A, see Orlik and Terao[34] as a general reference. -

The Fundamental Group and Seifert-Van Kampen's
THE FUNDAMENTAL GROUP AND SEIFERT-VAN KAMPEN'S THEOREM KATHERINE GALLAGHER Abstract. The fundamental group is an essential tool for studying a topo- logical space since it provides us with information about the basic shape of the space. In this paper, we will introduce the notion of free products and free groups in order to understand Seifert-van Kampen's Theorem, which will prove to be a useful tool in computing fundamental groups. Contents 1. Introduction 1 2. Background Definitions and Facts 2 3. Free Groups and Free Products 4 4. Seifert-van Kampen Theorem 6 Acknowledgments 12 References 12 1. Introduction One of the fundamental questions in topology is whether two topological spaces are homeomorphic or not. To show that two topological spaces are homeomorphic, one must construct a continuous function from one space to the other having a continuous inverse. To show that two topological spaces are not homeomorphic, one must show there does not exist a continuous function with a continuous inverse. Both of these tasks can be quite difficult as the recently proved Poincar´econjecture suggests. The conjecture is about the existence of a homeomorphism between two spaces, and it took over 100 years to prove. Since the task of showing whether or not two spaces are homeomorphic can be difficult, mathematicians have developed other ways to solve this problem. One way to solve this problem is to find a topological property that holds for one space but not the other, e.g. the first space is metrizable but the second is not. Since many spaces are similar in many ways but not homeomorphic, mathematicians use a weaker notion of equivalence between spaces { that of homotopy equivalence. -
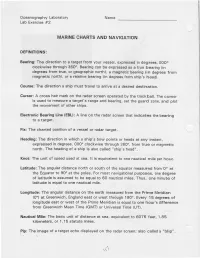
Marine Charts and Navigation
OceanographyLaboratory Name Lab Exercise#2 MARINECHARTS AND NAVIGATION DEFINITIONS: Bearing:The directionto a target from your vessel, expressedin degrees, 0OO" clockwise through 360". Bearingcan be expressedas a true bearing (in degreesfrom true, or geographicnorth), a magneticbearing (in degreesfrom magnetic north),or a relativebearing (in degreesfrom ship's head). Gourse:The directiona ship must travel to arrive at a desireddestination. Cursor:A cross hairmark on the radarscreen operated by the trackball.The cursor is used to measurea target'srange and bearing,set the guard zone,and plot the movementof other ships. ElectronicBearing Line (EBLI: A line on the radar screenthat indicates the bearing to a target. Fix: The charted positionof a vesselor radartarget. Heading:The directionin which a ship's bow pointsor headsat any instant, expressedin degrees,O0Oo clockwise through 360o,from true or magnetic north. The headingof a ship is alsocalled "ship's head". Knot: The unit of speedused at sea. lt is equivalentto one nauticalmile perhour. Latitude:The angulardistance north or south of the equatormeasured from O" at the Equatorto 9Ooat the poles.For most navigationalpurposes, one degree of latitudeis assumedto be equalto 60 nauticalmiles. Thus, one minute of latitude is equalto one nauticalmile. Longitude:The'angular distance on the earth measuredfrom the Prime Meridian (O') at Greenwich,England east or west through 180'. Every 15 degreesof longitudeeast or west of the PrimeMeridian is equalto one hour's difference from GreenwichMean Time (GMT)or Universal (UT). Time NauticalMile: The basic unit of distanceat sea, equivalentto 6076 feet, 1.85 kilometers,or 1.15 statutemiles. Pip:The imageof a targetecho displayedon the radarscreen; also calleda "blip". -

Angles, Azimuths and Bearings
Surveying & Measurement Angles, Azimuths and Bearings Introduction • Finding the locations of points and orientations of lines depends on measurements of angles and directions. • In surveying, directions are given by azimuths and bearings. • Angels measured in surveying are classified as . Horizontal angels . Vertical angles Introduction • Total station instruments are used to measure angels in the field. • Three basic requirements determining an angle: . Reference or starting line, . Direction of turning, and . Angular distance (value of the angel) Units of Angel Measurement In the United States and many other countries: . The sexagesimal system: degrees, minutes, and seconds with the last unit further divided decimally. (The circumference of circles is divided into 360 parts of degrees; each degree is further divided into minutes and seconds) • In Europe . Centesimal system: The circumference of circles is divided into 400 parts called gon (previously called grads) Units of Angel Measurement • Digital computers . Radians in computations: There are 2π radians in a circle (1 radian = 57.30°) • Mil - The circumference of a circle is divided into 6400 parts (used in military science) Kinds of Horizontal Angles • The most commonly measured horizontal angles in surveying: . Interior angles, . Angles to the right, and . Deflection angles • Because they differ considerably, the kind used must be clearly identified in field notes. Interior Angles • It is measured on the inside of a closed polygon (traverse) or open as for a highway. • Polygon: closed traverse used for boundary survey. • A check can be made because the sum of all angles in any polygon must equal • (n-2)180° where n is the number of angles. -

Appendix a to Higher Education Institution
APPENDIX A TO HIGHER EDUCATION INSTITUTION LICENSE AGREEMENT Education Products and Deployment Schedule Institutions may copy and deploy the Education Products up to the total number of users and/or quantity of licences below that corresponds to the option of Higher Education Institution Licence for which the applicable Annual Fee has been paid: 1. Site License Options: Higher Education Institution Agreement Options Option A Option B Option C Passes to Esri International User Conference 1 1 1 including Education GIS Conference Products included for Academic Use ArcGIS Online Organisations 25 @ 100 users 5 @ 100 users 5 @100 Users 1 @ 2,500 users 1 @ 500 users ArcGIS Named Users 0 Level 1 0 Level 1 0 Level 1 5000 Level 2 1000 Level 2 500 Level 2 ArcGIS Online credits 500 per Level 2 500 per Level 2 500 per Level 2 user user user (2.5 million) (500,000) (150,000) Apps for Office* - 5000 1000 500 Desktop (ArcMap/Pro), CityEngine etc. Advanced Advanced Advanced Apps for the Field* - 5000 Level 2 1000 Level 2 500 Level 2 Collector/Survey 123 etc. Tied to AGOL Org Tied to AGOL Org Tied to AGOL Org Apps for Community* – Yes Yes Yes Storymaps / OpenData Tied to AGOL Org Tied to AGOL Org Tied to AGOL Org ArcGIS Enterprise Advanced 10 Base 2 Base 1 Base Deployments Deployments Deployment ArcGIS Enterprise named Users 0 Level 1 0 Level 1 0 Level 1 5000 Level 2 1000 Level 2 500 Level 2 Developer Subscriptions – Enterprise Plan 100 20 10 https://developers.arcgis.com/pricing/ Additional User Pack NA 500 additional users for £500 plus VAT (Max of 3 -

Graph Manifolds and Taut Foliations Mark Brittenham1, Ramin Naimi, and Rachel Roberts2 Introduction
Graph manifolds and taut foliations 1 2 Mark Brittenham , Ramin Naimi, and Rachel Roberts UniversityofTexas at Austin Abstract. We examine the existence of foliations without Reeb comp onents, taut 1 1 foliations, and foliations with no S S -leaves, among graph manifolds. We show that each condition is strictly stronger than its predecessors, in the strongest p os- sible sense; there are manifolds admitting foliations of eachtyp e which do not admit foliations of the succeeding typ es. x0 Introduction Taut foliations have b een increasingly useful in understanding the top ology of 3-manifolds, thanks largely to the work of David Gabai [Ga1]. Many 3-manifolds admit taut foliations [Ro1],[De],[Na1], although some do not [Br1],[Cl]. To date, however, there are no adequate necessary or sucient conditions for a manifold to admit a taut foliation. This pap er seeks to add to this confusion. In this pap er we study the existence of taut foliations and various re nements, among graph manifolds. What we show is that there are many graph manifolds which admit foliations that are as re ned as wecho ose, but which do not admit foliations admitting any further re nements. For example, we nd manifolds which admit foliations without Reeb comp onents, but no taut foliations. We also nd 0 manifolds admitting C foliations with no compact leaves, but which do not admit 2 any C such foliations. These results p oint to the subtle nature b ehind b oth top ological and analytical assumptions when dealing with foliations. A principal motivation for this work came from a particularly interesting exam- ple; the manifold M obtained by 37/2 Dehn surgery on the 2,3,7 pretzel knot K . -

Ergodicity and Metric Transitivity
Chapter 25 Ergodicity and Metric Transitivity Section 25.1 explains the ideas of ergodicity (roughly, there is only one invariant set of positive measure) and metric transivity (roughly, the system has a positive probability of going from any- where to anywhere), and why they are (almost) the same. Section 25.2 gives some examples of ergodic systems. Section 25.3 deduces some consequences of ergodicity, most im- portantly that time averages have deterministic limits ( 25.3.1), and an asymptotic approach to independence between even§ts at widely separated times ( 25.3.2), admittedly in a very weak sense. § 25.1 Metric Transitivity Definition 341 (Ergodic Systems, Processes, Measures and Transfor- mations) A dynamical system Ξ, , µ, T is ergodic, or an ergodic system or an ergodic process when µ(C) = 0 orXµ(C) = 1 for every T -invariant set C. µ is called a T -ergodic measure, and T is called a µ-ergodic transformation, or just an ergodic measure and ergodic transformation, respectively. Remark: Most authorities require a µ-ergodic transformation to also be measure-preserving for µ. But (Corollary 54) measure-preserving transforma- tions are necessarily stationary, and we want to minimize our stationarity as- sumptions. So what most books call “ergodic”, we have to qualify as “stationary and ergodic”. (Conversely, when other people talk about processes being “sta- tionary and ergodic”, they mean “stationary with only one ergodic component”; but of that, more later. Definition 342 (Metric Transitivity) A dynamical system is metrically tran- sitive, metrically indecomposable, or irreducible when, for any two sets A, B n ∈ , if µ(A), µ(B) > 0, there exists an n such that µ(T − A B) > 0. -

MTH 304: General Topology Semester 2, 2017-2018
MTH 304: General Topology Semester 2, 2017-2018 Dr. Prahlad Vaidyanathan Contents I. Continuous Functions3 1. First Definitions................................3 2. Open Sets...................................4 3. Continuity by Open Sets...........................6 II. Topological Spaces8 1. Definition and Examples...........................8 2. Metric Spaces................................. 11 3. Basis for a topology.............................. 16 4. The Product Topology on X × Y ...................... 18 Q 5. The Product Topology on Xα ....................... 20 6. Closed Sets.................................. 22 7. Continuous Functions............................. 27 8. The Quotient Topology............................ 30 III.Properties of Topological Spaces 36 1. The Hausdorff property............................ 36 2. Connectedness................................. 37 3. Path Connectedness............................. 41 4. Local Connectedness............................. 44 5. Compactness................................. 46 6. Compact Subsets of Rn ............................ 50 7. Continuous Functions on Compact Sets................... 52 8. Compactness in Metric Spaces........................ 56 9. Local Compactness.............................. 59 IV.Separation Axioms 62 1. Regular Spaces................................ 62 2. Normal Spaces................................ 64 3. Tietze's extension Theorem......................... 67 4. Urysohn Metrization Theorem........................ 71 5. Imbedding of Manifolds.......................... -

POINT-COFINITE COVERS in the LAVER MODEL 1. Background Let
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 138, Number 9, September 2010, Pages 3313–3321 S 0002-9939(10)10407-9 Article electronically published on April 30, 2010 POINT-COFINITE COVERS IN THE LAVER MODEL ARNOLD W. MILLER AND BOAZ TSABAN (Communicated by Julia Knight) Abstract. Let S1(Γ, Γ) be the statement: For each sequence of point-cofinite open covers, one can pick one element from each cover and obtain a point- cofinite cover. b is the minimal cardinality of a set of reals not satisfying S1(Γ, Γ). We prove the following assertions: (1) If there is an unbounded tower, then there are sets of reals of cardinality b satisfying S1(Γ, Γ). (2) It is consistent that all sets of reals satisfying S1(Γ, Γ) have cardinality smaller than b. These results can also be formulated as dealing with Arhangel’ski˘ı’s property α2 for spaces of continuous real-valued functions. The main technical result is that in Laver’s model, each set of reals of cardinality b has an unbounded Borel image in the Baire space ωω. 1. Background Let P be a nontrivial property of sets of reals. The critical cardinality of P , denoted non(P ), is the minimal cardinality of a set of reals not satisfying P .A natural question is whether there is a set of reals of cardinality at least non(P ), which satisfies P , i.e., a nontrivial example. We consider the following property. Let X be a set of reals. U is a point-cofinite cover of X if U is infinite, and for each x ∈ X, {U ∈U: x ∈ U} is a cofinite subset of U.1 Having X fixed in the background, let Γ be the family of all point- cofinite open covers of X. -

A TEXTBOOK of TOPOLOGY Lltld
SEIFERT AND THRELFALL: A TEXTBOOK OF TOPOLOGY lltld SEI FER T: 7'0PO 1.OG 1' 0 I.' 3- Dl M E N SI 0 N A I. FIRERED SPACES This is a volume in PURE AND APPLIED MATHEMATICS A Series of Monographs and Textbooks Editors: SAMUELEILENBERG AND HYMANBASS A list of recent titles in this series appears at the end of this volunie. SEIFERT AND THRELFALL: A TEXTBOOK OF TOPOLOGY H. SEIFERT and W. THRELFALL Translated by Michael A. Goldman und S E I FE R T: TOPOLOGY OF 3-DIMENSIONAL FIBERED SPACES H. SEIFERT Translated by Wolfgang Heil Edited by Joan S. Birman and Julian Eisner @ 1980 ACADEMIC PRESS A Subsidiary of Harcourr Brace Jovanovich, Publishers NEW YORK LONDON TORONTO SYDNEY SAN FRANCISCO COPYRIGHT@ 1980, BY ACADEMICPRESS, INC. ALL RIGHTS RESERVED. NO PART OF THIS PUBLICATION MAY BE REPRODUCED OR TRANSMITTED IN ANY FORM OR BY ANY MEANS, ELECTRONIC OR MECHANICAL, INCLUDING PHOTOCOPY, RECORDING, OR ANY INFORMATION STORAGE AND RETRIEVAL SYSTEM, WITHOUT PERMISSION IN WRITING FROM THE PUBLISHER. ACADEMIC PRESS, INC. 11 1 Fifth Avenue, New York. New York 10003 United Kingdom Edition published by ACADEMIC PRESS, INC. (LONDON) LTD. 24/28 Oval Road, London NWI 7DX Mit Genehmigung des Verlager B. G. Teubner, Stuttgart, veranstaltete, akin autorisierte englische Ubersetzung, der deutschen Originalausgdbe. Library of Congress Cataloging in Publication Data Seifert, Herbert, 1897- Seifert and Threlfall: A textbook of topology. Seifert: Topology of 3-dimensional fibered spaces. (Pure and applied mathematics, a series of mono- graphs and textbooks ; ) Translation of Lehrbuch der Topologic. Bibliography: p. Includes index. 1.