Solving Linear First-Order Differential Equations Leonard Euler's Integrating Factor Method
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Introduction to Differential Equations
Introduction to Differential Equations Lecture notes for MATH 2351/2352 Jeffrey R. Chasnov k kK m m x1 x2 The Hong Kong University of Science and Technology The Hong Kong University of Science and Technology Department of Mathematics Clear Water Bay, Kowloon Hong Kong Copyright ○c 2009–2016 by Jeffrey Robert Chasnov This work is licensed under the Creative Commons Attribution 3.0 Hong Kong License. To view a copy of this license, visit http://creativecommons.org/licenses/by/3.0/hk/ or send a letter to Creative Commons, 171 Second Street, Suite 300, San Francisco, California, 94105, USA. Preface What follows are my lecture notes for a first course in differential equations, taught at the Hong Kong University of Science and Technology. Included in these notes are links to short tutorial videos posted on YouTube. Much of the material of Chapters 2-6 and 8 has been adapted from the widely used textbook “Elementary differential equations and boundary value problems” by Boyce & DiPrima (John Wiley & Sons, Inc., Seventh Edition, ○c 2001). Many of the examples presented in these notes may be found in this book. The material of Chapter 7 is adapted from the textbook “Nonlinear dynamics and chaos” by Steven H. Strogatz (Perseus Publishing, ○c 1994). All web surfers are welcome to download these notes, watch the YouTube videos, and to use the notes and videos freely for teaching and learning. An associated free review book with links to YouTube videos is also available from the ebook publisher bookboon.com. I welcome any comments, suggestions or corrections sent by email to [email protected]. -

Ordinary Differential Equations
Ordinary Differential Equations for Engineers and Scientists Gregg Waterman Oregon Institute of Technology c 2017 Gregg Waterman This work is licensed under the Creative Commons Attribution 4.0 International license. The essence of the license is that You are free to: Share copy and redistribute the material in any medium or format • Adapt remix, transform, and build upon the material for any purpose, even commercially. • The licensor cannot revoke these freedoms as long as you follow the license terms. Under the following terms: Attribution You must give appropriate credit, provide a link to the license, and indicate if changes • were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. No additional restrictions You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits. Notices: You do not have to comply with the license for elements of the material in the public domain or where your use is permitted by an applicable exception or limitation. No warranties are given. The license may not give you all of the permissions necessary for your intended use. For example, other rights such as publicity, privacy, or moral rights may limit how you use the material. For any reuse or distribution, you must make clear to others the license terms of this work. The best way to do this is with a link to the web page below. To view a full copy of this license, visit https://creativecommons.org/licenses/by/4.0/legalcode. -

3 Runge-Kutta Methods
3 Runge-Kutta Methods In contrast to the multistep methods of the previous section, Runge-Kutta methods are single-step methods — however, with multiple stages per step. They are motivated by the dependence of the Taylor methods on the specific IVP. These new methods do not require derivatives of the right-hand side function f in the code, and are therefore general-purpose initial value problem solvers. Runge-Kutta methods are among the most popular ODE solvers. They were first studied by Carle Runge and Martin Kutta around 1900. Modern developments are mostly due to John Butcher in the 1960s. 3.1 Second-Order Runge-Kutta Methods As always we consider the general first-order ODE system y0(t) = f(t, y(t)). (42) Since we want to construct a second-order method, we start with the Taylor expansion h2 y(t + h) = y(t) + hy0(t) + y00(t) + O(h3). 2 The first derivative can be replaced by the right-hand side of the differential equation (42), and the second derivative is obtained by differentiating (42), i.e., 00 0 y (t) = f t(t, y) + f y(t, y)y (t) = f t(t, y) + f y(t, y)f(t, y), with Jacobian f y. We will from now on neglect the dependence of y on t when it appears as an argument to f. Therefore, the Taylor expansion becomes h2 y(t + h) = y(t) + hf(t, y) + [f (t, y) + f (t, y)f(t, y)] + O(h3) 2 t y h h = y(t) + f(t, y) + [f(t, y) + hf (t, y) + hf (t, y)f(t, y)] + O(h3(43)). -

Runge-Kutta Scheme Takes the Form K1 = Hf (Tn, Yn); K2 = Hf (Tn + Αh, Yn + Βk1); (5.11) Yn+1 = Yn + A1k1 + A2k2
Approximate integral using the trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ))] ; t = t + h: n+1 n 2 n n n+1 n+1 n+1 n Use Euler's method to approximate Y (tn+1) ≈ Y (tn) + hf (tn; Y (tn)) in trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ) + hf (t ; Y (t )))] : n+1 n 2 n n n+1 n n n Hence the modified Euler's scheme 8 K1 = hf (tn; yn) > h <> y = y + [f (t ; y ) + f (t ; y + hf (t ; y ))] , K2 = hf (tn+1; yn + K1) n+1 n 2 n n n+1 n n n > K1 + K2 :> y = y + n+1 n 2 5.3.1 Modified Euler Method Numerical solution of Initial Value Problem: dY Z tn+1 = f (t; Y ) , Y (tn+1) = Y (tn) + f (t; Y (t)) dt: dt tn Use Euler's method to approximate Y (tn+1) ≈ Y (tn) + hf (tn; Y (tn)) in trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ) + hf (t ; Y (t )))] : n+1 n 2 n n n+1 n n n Hence the modified Euler's scheme 8 K1 = hf (tn; yn) > h <> y = y + [f (t ; y ) + f (t ; y + hf (t ; y ))] , K2 = hf (tn+1; yn + K1) n+1 n 2 n n n+1 n n n > K1 + K2 :> y = y + n+1 n 2 5.3.1 Modified Euler Method Numerical solution of Initial Value Problem: dY Z tn+1 = f (t; Y ) , Y (tn+1) = Y (tn) + f (t; Y (t)) dt: dt tn Approximate integral using the trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ))] ; t = t + h: n+1 n 2 n n n+1 n+1 n+1 n Hence the modified Euler's scheme 8 K1 = hf (tn; yn) > h <> y = y + [f (t ; y ) + f (t ; y + hf (t ; y ))] , K2 = hf (tn+1; yn + K1) n+1 n 2 n n n+1 n n n > K1 + K2 :> y = y + n+1 n 2 5.3.1 Modified Euler Method Numerical solution of Initial Value Problem: dY Z tn+1 = -

The Original Euler's Calculus-Of-Variations Method: Key
Submitted to EJP 1 Jozef Hanc, [email protected] The original Euler’s calculus-of-variations method: Key to Lagrangian mechanics for beginners Jozef Hanca) Technical University, Vysokoskolska 4, 042 00 Kosice, Slovakia Leonhard Euler's original version of the calculus of variations (1744) used elementary mathematics and was intuitive, geometric, and easily visualized. In 1755 Euler (1707-1783) abandoned his version and adopted instead the more rigorous and formal algebraic method of Lagrange. Lagrange’s elegant technique of variations not only bypassed the need for Euler’s intuitive use of a limit-taking process leading to the Euler-Lagrange equation but also eliminated Euler’s geometrical insight. More recently Euler's method has been resurrected, shown to be rigorous, and applied as one of the direct variational methods important in analysis and in computer solutions of physical processes. In our classrooms, however, the study of advanced mechanics is still dominated by Lagrange's analytic method, which students often apply uncritically using "variational recipes" because they have difficulty understanding it intuitively. The present paper describes an adaptation of Euler's method that restores intuition and geometric visualization. This adaptation can be used as an introductory variational treatment in almost all of undergraduate physics and is especially powerful in modern physics. Finally, we present Euler's method as a natural introduction to computer-executed numerical analysis of boundary value problems and the finite element method. I. INTRODUCTION In his pioneering 1744 work The method of finding plane curves that show some property of maximum and minimum,1 Leonhard Euler introduced a general mathematical procedure or method for the systematic investigation of variational problems. -
Numerical Stability; Implicit Methods
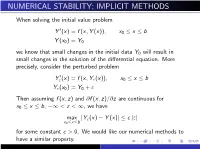
NUMERICAL STABILITY; IMPLICIT METHODS When solving the initial value problem 0 Y (x) = f (x; Y (x)); x0 ≤ x ≤ b Y (x0) = Y0 we know that small changes in the initial data Y0 will result in small changes in the solution of the differential equation. More precisely, consider the perturbed problem 0 Y"(x) = f (x; Y"(x)); x0 ≤ x ≤ b Y"(x0) = Y0 + " Then assuming f (x; z) and @f (x; z)=@z are continuous for x0 ≤ x ≤ b; −∞ < z < 1, we have max jY"(x) − Y (x)j ≤ c j"j x0≤x≤b for some constant c > 0. We would like our numerical methods to have a similar property. Consider the Euler method yn+1 = yn + hf (xn; yn) ; n = 0; 1;::: y0 = Y0 and then consider the perturbed problem " " " yn+1 = yn + hf (xn; yn ) ; n = 0; 1;::: " y0 = Y0 + " We can show the following: " max jyn − ynj ≤ cbj"j x0≤xn≤b for some constant cb > 0 and for all sufficiently small values of the stepsize h. This implies that Euler's method is stable, and in the same manner as was true for the original differential equation problem. The general idea of stability for a numerical method is essentially that given above for Eulers's method. There is a general theory for numerical methods for solving the initial value problem 0 Y (x) = f (x; Y (x)); x0 ≤ x ≤ b Y (x0) = Y0 If the truncation error in a numerical method has order 2 or greater, then the numerical method is stable if and only if it is a convergent numerical method. -

New Dirac Delta Function Based Methods with Applications To
New Dirac Delta function based methods with applications to perturbative expansions in quantum field theory Achim Kempf1, David M. Jackson2, Alejandro H. Morales3 1Departments of Applied Mathematics and Physics 2Department of Combinatorics and Optimization University of Waterloo, Ontario N2L 3G1, Canada, 3Laboratoire de Combinatoire et d’Informatique Math´ematique (LaCIM) Universit´edu Qu´ebec `aMontr´eal, Canada Abstract. We derive new all-purpose methods that involve the Dirac Delta distribution. Some of the new methods use derivatives in the argument of the Dirac Delta. We highlight potential avenues for applications to quantum field theory and we also exhibit a connection to the problem of blurring/deblurring in signal processing. We find that blurring, which can be thought of as a result of multi-path evolution, is, in Euclidean quantum field theory without spontaneous symmetry breaking, the strong coupling dual of the usual small coupling expansion in terms of the sum over Feynman graphs. arXiv:1404.0747v3 [math-ph] 23 Sep 2014 2 1. A method for generating new representations of the Dirac Delta The Dirac Delta distribution, see e.g., [1, 2, 3], serves as a useful tool from physics to engineering. Our aim here is to develop new all-purpose methods involving the Dirac Delta distribution and to show possible avenues for applications, in particular, to quantum field theory. We begin by fixing the conventions for the Fourier transform: 1 1 g(y) := g(x) eixy dx, g(x)= g(y) e−ixy dy (1) √2π √2π Z Z To simplify the notation we denote integration over the real line by the absence of e e integration delimiters. -

Leonhard Euler: His Life, the Man, and His Works∗
SIAM REVIEW c 2008 Walter Gautschi Vol. 50, No. 1, pp. 3–33 Leonhard Euler: His Life, the Man, and His Works∗ Walter Gautschi† Abstract. On the occasion of the 300th anniversary (on April 15, 2007) of Euler’s birth, an attempt is made to bring Euler’s genius to the attention of a broad segment of the educated public. The three stations of his life—Basel, St. Petersburg, andBerlin—are sketchedandthe principal works identified in more or less chronological order. To convey a flavor of his work andits impact on modernscience, a few of Euler’s memorable contributions are selected anddiscussedinmore detail. Remarks on Euler’s personality, intellect, andcraftsmanship roundout the presentation. Key words. LeonhardEuler, sketch of Euler’s life, works, andpersonality AMS subject classification. 01A50 DOI. 10.1137/070702710 Seh ich die Werke der Meister an, So sehe ich, was sie getan; Betracht ich meine Siebensachen, Seh ich, was ich h¨att sollen machen. –Goethe, Weimar 1814/1815 1. Introduction. It is a virtually impossible task to do justice, in a short span of time and space, to the great genius of Leonhard Euler. All we can do, in this lecture, is to bring across some glimpses of Euler’s incredibly voluminous and diverse work, which today fills 74 massive volumes of the Opera omnia (with two more to come). Nine additional volumes of correspondence are planned and have already appeared in part, and about seven volumes of notebooks and diaries still await editing! We begin in section 2 with a brief outline of Euler’s life, going through the three stations of his life: Basel, St. -

A Brief Introduction to Numerical Methods for Differential Equations
A Brief Introduction to Numerical Methods for Differential Equations January 10, 2011 This tutorial introduces some basic numerical computation techniques that are useful for the simulation and analysis of complex systems modelled by differential equations. Such differential models, especially those partial differential ones, have been extensively used in various areas from astronomy to biology, from meteorology to finance. However, if we ignore the differences caused by applications and focus on the mathematical equations only, a fundamental question will arise: Can we predict the future state of a system from a known initial state and the rules describing how it changes? If we can, how to make the prediction? This problem, known as Initial Value Problem(IVP), is one of those problems that we are most concerned about in numerical analysis for differential equations. In this tutorial, Euler method is used to solve this problem and a concrete example of differential equations, the heat diffusion equation, is given to demonstrate the techniques talked about. But before introducing Euler method, numerical differentiation is discussed as a prelude to make you more comfortable with numerical methods. 1 Numerical Differentiation 1.1 Basic: Forward Difference Derivatives of some simple functions can be easily computed. However, if the function is too compli- cated, or we only know the values of the function at several discrete points, numerical differentiation is a tool we can rely on. Numerical differentiation follows an intuitive procedure. Recall what we know about the defini- tion of differentiation: df f(x + h) − f(x) = f 0(x) = lim dx h!0 h which means that the derivative of function f(x) at point x is the difference between f(x + h) and f(x) divided by an infinitesimal h. -

Second Order Linear Differential Equations Y
Second Order Linear Differential Equations Second order linear equations with constant coefficients; Fundamental solutions; Wronskian; Existence and Uniqueness of solutions; the characteristic equation; solutions of homogeneous linear equations; reduction of order; Euler equations In this chapter we will study ordinary differential equations of the standard form below, known as the second order linear equations : y″ + p(t) y′ + q(t) y = g(t). Homogeneous Equations : If g(t) = 0, then the equation above becomes y″ + p(t) y′ + q(t) y = 0. It is called a homogeneous equation. Otherwise, the equation is nonhomogeneous (or inhomogeneous ). Trivial Solution : For the homogeneous equation above, note that the function y(t) = 0 always satisfies the given equation, regardless what p(t) and q(t) are. This constant zero solution is called the trivial solution of such an equation. © 2008, 2016 Zachary S Tseng B-1 - 1 Second Order Linear Homogeneous Differential Equations with Constant Coefficients For the most part, we will only learn how to solve second order linear equation with constant coefficients (that is, when p(t) and q(t) are constants). Since a homogeneous equation is easier to solve compares to its nonhomogeneous counterpart, we start with second order linear homogeneous equations that contain constant coefficients only: a y″ + b y′ + c y = 0. Where a, b, and c are constants, a ≠ 0. A very simple instance of such type of equations is y″ − y = 0 . The equation’s solution is any function satisfying the equality t y″ = y. Obviously y1 = e is a solution, and so is any constant multiple t −t of it, C1 e . -

Oscillation-Free Method for Semilinear Diffusion Equations Under
Oscillation-free method for semilinear diffusion equations under noisy initial conditions R. C. Harwooda,∗, Likun Zhangb, V. S. Manoranjanc aDepartment of Mathematics, George Fox University, Newberg, OR 97132, USA bDepartment of Physics and Center for Nonlinear Dynamics, University of Texas at Austin, Austin, TX 78712, USA cDepartment of Mathematics, Washington State University, Pullman, WA 99164, USA Abstract Noise in initial conditions from measurement errors can create unwanted oscillations which propagate in numerical solutions. We present a technique of prohibiting such oscillation errors when solving initial-boundary-value problems of semilinear diffusion equations. Symmetric Strang splitting is applied to the equation for solving the linear diffusion and nonlinear remainder separately. An oscillation-free scheme is developed for overcoming any oscillatory behavior when numerically solving the linear diffusion portion. To demonstrate the ills of stable oscillations, we compare our method using a weighted implicit Euler scheme to the Crank-Nicolson method. The oscillation-free feature and stability of our method are analyzed through a local linearization. The accuracy of our oscillation-free method is proved and its usefulness is further verified through solving a Fisher-type equation where oscillation-free solutions are successfully produced in spite of random errors in the initial conditions. Keywords: numerical oscillations, splitting methods, finite difference, Euler method, reaction-diffusion, semilinear parabolic partial differential equation arXiv:1607.07433v1 [math.NA] 23 Jul 2016 1. Introduction Before analyzing numerical methods for stability it is necessary that the equations they solve be well-posed and stable themselves. In this paper, we consider the ∗Corresponding author Email addresses: [email protected] (R. -

5 Mar 2009 a Survey on the Inverse Integrating Factor
A survey on the inverse integrating factor.∗ Isaac A. Garc´ıa (1) & Maite Grau (1) Abstract The relation between limit cycles of planar differential systems and the inverse integrating factor was first shown in an article of Giacomini, Llibre and Viano appeared in 1996. From that moment on, many research articles are devoted to the study of the properties of the inverse integrating factor and its relation with limit cycles and their bifurcations. This paper is a summary of all the results about this topic. We include a list of references together with the corresponding related results aiming at being as much exhaustive as possible. The paper is, nonetheless, self-contained in such a way that all the main results on the inverse integrating factor are stated and a complete overview of the subject is given. Each section contains a different issue to which the inverse integrating factor plays a role: the integrability problem, relation with Lie symmetries, the center problem, vanishing set of an inverse integrating factor, bifurcation of limit cycles from either a period annulus or from a monodromic ω-limit set and some generalizations. 2000 AMS Subject Classification: 34C07, 37G15, 34-02. Key words and phrases: inverse integrating factor, bifurcation, Poincar´emap, limit cycle, Lie symmetry, integrability, monodromic graphic. arXiv:0903.0941v1 [math.DS] 5 Mar 2009 1 The Euler integrating factor The method of integrating factors is, in principle, a means for solving ordinary differential equations of first order and it is theoretically important. The use of integrating factors goes back to Leonhard Euler. Let us consider a first order differential equation and write the equation in the Pfaffian form ω = P (x, y) dy Q(x, y) dx =0 .