Teleoperation and Visualization Interfaces for In-Space Operations Will Pryor, Balazs P
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Virtual and Augmented Reality in Marketing
Virtual and Augmented Reality in Marketing Laura Håkansson Thesis Tietojenkäsittelyn Koulutusohjelma 2018 Authors Group Laura Håkansson HETI15KIM The title of your thesis Number of Virtual and Augmented Reality in Marketing pages and appendices 56 Supervisors Heikki Hietala This thesis serves as an introduction to Virtual and Augmented Reality and explains how these two different technologies can be used in marketing. I work in marketing and have been following the evolvement of both VR and AR for a few years now. I was personally very curious to learn about how these have been implemented in marketing in the past, and what they will look like in the future, and if there are any reoccurring themes, for both VR and AR, that work best with a specific product or service. I spent a year reading the latest news and articles about various VR/AR marketing campaigns, and about the updates on these technologies that kept coming almost monthly. I also participated in different VR/AR-themed events in Helsinki to try out headsets and new AR apps, and to listen to the experts view on the potential of VR and AR. I wanted to create clear guidelines on which technology to use and how, depending on the product or service being marketed, but realized during my research that this was not possible. VR and AR are still in development, but evolving at a very fast pace, and right now it’s important to just bravely test them out without worrying about failing. I give plenty of examples in this thesis that will hopefully encourage marketers to start experimenting now, because we will see some really advanced VR and AR/MR in a few years, and those with the most experience will have great advantage in the marketing field. -

12.2% 116,000 125M Top 1% 154 4,200
We are IntechOpen, the world’s leading publisher of Open Access books Built by scientists, for scientists 4,200 116,000 125M Open access books available International authors and editors Downloads Our authors are among the 154 TOP 1% 12.2% Countries delivered to most cited scientists Contributors from top 500 universities Selection of our books indexed in the Book Citation Index in Web of Science™ Core Collection (BKCI) Interested in publishing with us? Contact [email protected] Numbers displayed above are based on latest data collected. For more information visit www.intechopen.com Chapter 4 Waveguide-Type Head-Mounted Display System for AR Application Munkh-Uchral Erdenebat,Munkh-Uchral Erdenebat, Young-Tae Lim,Young-Tae Lim, Ki-Chul Kwon,Ki-Chul Kwon, Nyamsuren DarkhanbaatarNyamsuren Darkhanbaatar and Nam KimNam Kim Additional information is available at the end of the chapter http://dx.doi.org/10.5772/intechopen.75172 Abstract Currently, a lot of institutes and industries are working on the development of the virtual reality and augmented reality techniques, and these techniques have been recognized as the determination for the direction of the three-dimensional display development in the near future. In this chapter, we mainly discussed the design and application of several wearable head-mounted display (HMD) systems with the waveguide structure using the in- and out-couplers which are fabricated by the diffractive optical elements or holo - graphic volume gratings. Although the structure is simple, the waveguide-type HMDs are very efficient, especially in the practical applications, especially in the augmented reality applications, which make the device light-weighted. -

Hate in Social VR New Challenges Ahead for the Next Generation of Social Media
Hate in Social VR New Challenges Ahead for the Next Generation of Social Media Sections 1 Introduction: ADL and New Technologies 5 Cautionary Tales: Hate, Bias, and Harassment in Video Games, Social Media, and the Tech 2 Hopes and Fears for the Future of Social Virtual Industry Reality 6 Sexism, Racism, and Anti-Semitism in Social VR 3 Social VR: Industry Overview and Technological Today Affordances 7 What Comes Next for Social VR? 4 Hopeful Futures: Equity, Justice, and VR 8 Bibliography 9 Appendix: Codes of Conduct and Content Reporting and Moderation in Social VR 1 / 65 INTRODUCTION: ADL AND NEW TECHNOLOGIES The timeless mission of the Anti-Defamation League (ADL) is to stop the defamation of the Jewish people and secure justice and fair treatment to all. The mission of ADL’s Center for Technology and Society is to ask the question “How do we secure justice and fair treatment for all in a digital environment?” Since 1985, when it published its report on “Electronic Bulletin Boards of Hate,” ADL has been at the forefront of evaluating how new technologies can be used for good and misused to promote hate and harassment in society. At the same time, ADL has worked with technology companies to show them how they can address these issues and work to make the communities their products foster more respectful and inclusive. We continue this work today alongside Silicon Valley giants such as Facebook, Twitter, Google, Microsoft, Reddit, and others. This report represents a forward-looking review of the hopes and issues raised by the newest ecosystem of community fostering technology products: social virtual reality, or social VR. -

Haptic Augmented Reality 10 Taxonomy, Research Status, and Challenges
Haptic Augmented Reality 10 Taxonomy, Research Status, and Challenges Seokhee Jeon, Seungmoon Choi, and Matthias Harders CONTENTS 10.1 Introduction ..................................................................................................227 10.2 Taxonomies ...................................................................................................229 10.2.1 Visuo-Haptic Reality–Virtuality Continuum ...................................229 10.2.2 Artificial Recreation and Augmented Perception ............................. 232 10.2.3 Within- and Between-Property Augmentation ................................. 233 10.3 Components Required for Haptic AR ..........................................................234 10.3.1 Interface for Haptic AR ....................................................................234 10.3.2 Registration between Real and Virtual Stimuli ................................236 10.3.3 Rendering Algorithm for Augmentation ..........................................237 10.3.4 Models for Haptic AR.......................................................................238 10.4 Stiffness Modulation.....................................................................................239 10.4.1 Haptic AR Interface ..........................................................................240 10.4.2 Stiffness Modulation in Single-Contact Interaction .........................240 10.4.3 Stiffness Modulation in Two-Contact Squeezing .............................243 10.5 Application: Palpating Virtual Inclusion in Phantom -

Project Final Report
FP7-RSME-262160 PROJECT FINAL REPORT Publishable summary Grant Agreement number: 262160 Project acronym: Digital Ocean Project title: Integrated multimedia mixed reality system, of real time virtual diving, by web teleoperated underwater data collecting robots, diffused online and through a network of submersible simulation devices. Funding Scheme: Capacities - RSME Period covered: from 1st of January 2011 to 31st of December 2012. Name of the scientific representative of the project’s co-ordinator: Antonio Dinis Title and organisation: President, VirtualDive Tel: +33(0)1 34 62 83 89 E-mail: [email protected] Project website address: www.digitalocean.eu 1 FP7-RSME-262160 EXECUTIVE SUMMARY Introduction and rationale. 70% of our planet is covered by water and the very survival of more than 50% of humanity is conditioned by oceans. Nevertheless, only 0,4% of this population have ever seen, through actual diving, what exists under the sea, beneath water’s hiding surfaces. 25 million people are considered practicing as they dive, in average, a week per year. They come essentially from Europe and from the US, are generally middle class males averaging 35 years old and are motivated by adventurous aspects of diving. The number remains practically stable. Women, children, handicapped and seniors are barely accounted for in diving. Diving remains a risky, expensive and complicated activity for the majority of people, especially in emerging markets. In such conditions, the contribution of the diving community to the discovery of undersea or to global awareness of challenges facing the oceans remains limited. There is a sense of urgency about offering to the public, ways to discover by themselves, how oceans – earth’s fragile life support system, are being neglected, irreversibly polluted and impoverished. -

Meaning–Making in Extended Reality Senso E Virtualità
Meaning–Making in Extended Reality Senso e Virtualità edited by Federico Biggio Victoria Dos Santos Gianmarco Thierry Giuliana Contributes by Antonio Allegra, Federico Biggio, Mila Bujic,´ Valentino Catricalà Juan Chen, Kyle Davidson, Victoria Dos Santos, Ruggero Eugeni Gianmarco Thierry Giuliana, Mirko Lino, Alexiev Momchil Claudio Paolucci, Mattia Thibault, Oguz˘ ‘Oz’ Buruk Humberto Valdivieso, Ugo Volli, Nannan Xi, Zhe Xue Aracne editrice www.aracneeditrice.it [email protected] Copyright © MMXX Gioacchino Onorati editore S.r.l. – unipersonale www.gioacchinoonoratieditore.it [email protected] via Vittorio Veneto, Canterano (RM) () ---- No part of this book may be reproduced by print, photoprint, microfilm, microfiche, or any other means, without publisher’s authorization. Ist edition: June Table of Contents 9 Introduction Federico Biggio, Victoria Dos Santos, Gianmarco Thierry Giuliana Part I Making Sense of the Virtual 21 Archeologia semiotica del virtuale Ugo Volli 43 Una percezione macchinica: realtà virtuale e realtà aumentata tra simulacri e protesi dell’enunciazione Claudio Paolucci 63 Technologically Modified Self–Centred Worlds. Modes of Pres- ence as Effects of Sense in Virtual, Augmented, Mixed and Extend- ed Reality Valentino Catricalà, Ruggero Eugeni 91 Towards a Semiotics of Augmented Reality Federico Biggio 113 Deconstructing the Experience. Meaning–Making in Virtual Reality Between and Beyond Games and Films Gianmarco Thierry Giuliana, Alexiev Momchil 7 8 Table of Contents 143 The Digital and the Spiritual: Validating Religious Experience Through Virtual Reality Victoria Dos Santos 165 Role–play, culture, and identity in virtual space. Semiotics of digital interactions Kyle Davidson 189 Tecnica, virtualità e paura. Su una versione dell’angoscia contem- poranea Antonio Allegra Part II Extended Spaces and Realities 207 VRBAN. -

Introduction to Virtual Reality
Intelligent Systems, Control and Automation: Science and Engineering Volume 64 Series Editor S. G. Tzafestas For further volumes: http://www.springer.com/series/6259 Matjazˇ Mihelj • Janez Podobnik Haptics for Virtual Reality and Teleoperation 123 Matjazˇ Mihelj Janez Podobnik Faculty of Electrical Engineering Faculty of Electrical Engineering University of Ljubljana University of Ljubljana Ljubljana Ljubljana Slovenia Slovenia ISBN 978-94-007-5717-2 ISBN 978-94-007-5718-9 (eBook) DOI 10.1007/978-94-007-5718-9 Springer Dordrecht Heidelberg New York London Library of Congress Control Number: 2012951397 Ó Springer Science?Business Media Dordrecht 2012 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publisher’s location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. -

Applications of Haptic Systems in Virtual Environments: a Brief Review
Chapter 13 Applications of Haptic Systems in Virtual Environments: A Brief Review Alma G. Rodríguez Ramírez, Francesco J. García Luna, Osslan Osiris Vergara Villegas and Manuel Nandayapa Abstract Haptic systems and virtual environments represent two innovative technologies that have been attractive for the development of applications where the immersion of the user is the main concern. This chapter presents a brief review about applications of haptic systems in virtual environments. Virtual environments will be considered either virtual reality (VR) or augmented reality (AR) by their virtual nature. Even if AR is usually considered an extension of VR, since most of the augmentations of reality are computer graphics, the nature of AR is also virtual and will be taken as a virtual environment. The applications are divided in two main categories, training and assistance. Each category has subsections for the use of haptic systems in virtual environments in education, medicine, and industry. Finally, an alternative category of entertainment is also discussed. Some repre- sentative research on each area of application isPROOF described to analyze and to discuss which are the trends and challenges related to the applications of haptic systems in virtual environments. Keywords Haptic systems Á Virtual environments Á Augmented reality Virtual reality 13.1 Introduction Humans are in constant interaction with different environments. The interaction is possible through the sense of sight, touch, taste, hearing, and smell. Basic knowledgeREVISED is learned through the five senses. Particularly, sight, hearing, and touch are essential to acquire knowledge based on the fact that people learn best when they see, hear, and do (Volunteer Development 4H-CLUB-100 2016). -

Download File
SUPPORTING MULTI-USER INTERACTION IN CO-LOCATED AND REMOTE AUGMENTED REALITY BY IMPROVING REFERENCE PERFORMANCE AND DECREASING PHYSICAL INTERFERENCE Ohan Oda Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences COLUMBIA UNIVERSITY 2016 © 2016 Ohan Oda All rights reserved ABSTRACT Supporting Multi-User Interaction in Co-Located and Remote Augmented Reality by Improving Reference Performance and Decreasing Physical Interference Ohan Oda One of the most fundamental components of our daily lives is social interaction, ranging from simple activities, such as purchasing a donut in a bakery on the way to work, to complex ones, such as instructing a remote colleague how to repair a broken automobile. While we inter- act with others, various challenges may arise, such as miscommunication or physical interference. In a bakery, a clerk may misunderstand the donut at which a customer was pointing due to the uncertainty of their finger direction. In a repair task, a technician may remove the wrong bolt and accidentally hit another user while replacing broken parts due to unclear instructions and lack of attention while communicating with a remote advisor. This dissertation explores techniques for supporting multi-user 3D interaction in aug- mented reality in a way that addresses these challenges. Augmented Reality (AR) refers to inter- actively overlaying geometrically registered virtual media on the real world. In particular, we address how an AR system can use overlaid graphics to assist users in referencing local objects accurately and remote objects efficiently, and prevent co-located users from physically interfer- ing with each other. -

Virtual Fixtures in VR – Perceptual Overlays for Assisted Teleoperation, Teleprogramming and Learning
International Conference on Artificial Reality and Telexistence Eurographics Symposium on Virtual Environments (2018) G. Bruder, S. Cobb, and S. Yoshimoto (Editors) Virtual Fixtures in VR – Perceptual Overlays for Assisted Teleoperation, Teleprogramming and Learning D. Krupke1;2 , J. Zhang2 and F. Steinicke1 1University of Hamburg, HCI, Germany 2University of Hamburg, TAMS, Germany Figure 1: The red line indicates a recorded trajectory of a single trial during the experiment, where the gripper is teleoperated to grasp the blue sphere on the left and to move it to the green goal zone on the right precisely and fast. In the experiment effects of visual and haptic assistance at difficult passages are examined. Abstract Current advances in mixed reality (MR) technology achieves both, making the sensations more immersive and plausible, but also increase the utilization of these technologies in robotics. Their low-cost and the low effort to integrate such a system in complex facilities makes them interesting for industrial application. We present an efficient implementation of “virtual fixtures” [BR92] and the evaluation in a task of three different difficulties. Finally, it is discussed if the method is successfully implemented without real physical barriers and if human performance is effected in teleoperation or teleprogramming of industrial robots. CCS Concepts • Human-centered computing → Virtual reality; • Computer systems organization → External interfaces for robotics; 1. Introduction system as a master-slave control system and presented images of the remote site to the operator meanwhile the movements of the Building and using tools for enhancing and improving our capa- operator were physically constraint in different ways. Current de- bilities is part of the human nature. -

Web-Based Indoor Positioning System Using QR-Codes As Mark- Ers
Instructor Giullio Jacucci, Petri Savolainen Web-based indoor positioning system using QR-codes as mark- ers Zhen Shi Helsinki November 5, 2020 Master of Computer Science UNIVERSITY OF HELSINKI Department of Computer Science HELSINGIN YLIOPISTO — HELSINGFORS UNIVERSITET — UNIVERSITY OF HELSINKI Tiedekunta — Fakultet — Faculty Laitos — Institution — Department Faculty of Science Department of Computer Science Tekijä — Författare — Author Zhen Shi Työn nimi — Arbetets titel — Title Web-based indoor positioning system using QR-codes as markers Oppiaine — Läroämne — Subject Computer Science Työn laji — Arbetets art — Level Aika — Datum — Month and year Sivumäärä — Sidoantal — Number of pages Master of Computer Science November 5, 2020 40 pages + 0 appendix pages Tiivistelmä — Referat — Abstract Location tracking has been quite an important tool in our daily life. The outdoor location tracking can easily be supported by GPS. However, the technology of tracking smart device users indoor position is not at the same maturity level as outdoor tracking. AR technology could enable the tracking on users indoor location by scanning the AR marker with their smart devices. However, due to several limitations (capacity, error tolerance, etc.) AR markers are not widely adopted. Therefore, not serving as a good candidate to be a tracking marker. This paper carries out a research question whether QR code can replace the AR marker as the tracking marker to detect smart devices’ user indoor position. The paper has discussed the research question by researching the background of the QR code and AR technology. According to the research, QR code should be a suitable choice to implement as a tracking marker. Comparing to the AR marker, QR code has a better capacity, higher error tolerance, and widely adopted. -
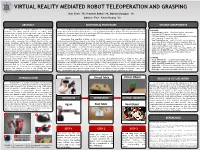
Virtual Reality Mediated Robot Teleoperation and Grasping
VIRTUAL REALITY MEDIATED ROBOT TELEOPERATION AND GRASPING Kun Chen ‘18, Prawesh Dahal ’18, Mariam Avagyan ‘18 Advisor: Prof. Kevin Huang ‘12 ABSTRACT METHODS & PROCEDURE SYSTEM COMPONENTS Teleoperation, or robotic operation at a distance, First, the Unity Game Engine was used to create our virtual environment with a table, objects (small boxes), and HARDWARE: leverages the many physical benefits of robots while hands. All created items were game objects, i.e. they followed basic rules of physics. The User can enter the virtual • Rethink Sawyer robot -- a high performance automation simultaneously bringing human high-level control and decision workspace and see the virtual objects by wearing the HTC Vive Headset. When the User wears Manus gloves and moves robot arm with 7 degrees of freedom (Fig. 1A) making into the loop. Poor viewing angles, occlusions, and their hands, virtual hands in Unity move accordingly. • HTC Vive Headset -- a virtual reality headset that allows the delays are several factors that can inhibit the visual realism and user to move in 3D space (Fig. 1B) usability of teleoperation. Furthermore, poor translation of Information flow from ROS to Unity: In order to make it possible for the robot, Sawyer, to visualize the real • Vive Tracking Dev ices -- small attachable motion tracking human motion commands into resultant robotic action can environment and identify real objects on the table, two ELP USB cameras were used along with the right-hand camera accessories. Provide wrist position and orientation (Fig. 1C) impede immersion, particularly for architectures wherein the in the Sawyer. Using AR_Track_Alvar package, AR tags with different IDs and sizes were generated and attached to • Manus Data Gloves -- virtual reality gloves.