Boundary Layers for Discrete Kinetic Models: Multicomponent Mixtures, Polyatomic Molecules, Bimolecular Reactions, and Quantum Kinetic Equations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Physics/9803005
UWThPh-1997-52 27. Oktober 1997 History and outlook of statistical physics 1 Dieter Flamm Institut f¨ur Theoretische Physik der Universit¨at Wien, Boltzmanngasse 5, 1090 Vienna, Austria Email: [email protected] Abstract This paper gives a short review of the history of statistical physics starting from D. Bernoulli’s kinetic theory of gases in the 18th century until the recent new developments in nonequilibrium kinetic theory in the last decades of this century. The most important contributions of the great physicists Clausius, Maxwell and Boltzmann are sketched. It is shown how the reversibility and the recurrence paradox are resolved within Boltzmann’s statistical interpretation of the second law of thermodynamics. An approach to classical and quantum statistical mechanics is outlined. Finally the progress in nonequilibrium kinetic theory in the second half of this century is sketched starting from the work of N.N. Bogolyubov in 1946 up to the progress made recently in understanding the diffusion processes in dense fluids using computer simulations and analytical methods. arXiv:physics/9803005v1 [physics.hist-ph] 4 Mar 1998 1Paper presented at the Conference on Creativity in Physics Education, on August 23, 1997, in Sopron, Hungary. 1 In the 17th century the physical nature of the air surrounding the earth was es- tablished. This was a necessary prerequisite for the formulation of the gas laws. The invention of the mercuri barometer by Evangelista Torricelli (1608–47) and the fact that Robert Boyle (1627–91) introduced the pressure P as a new physical variable where im- portant steps. Then Boyle–Mariotte’s law PV = const. -

Transitions Still to Be Made Philip Ball
impacts Transitions still to be made Philip Ball A collection of many particles all interacting according to simple, local rules can show behaviour that is anything but simple or predictable. Yet such systems constitute most of the tangible Universe, and the theories that describe them continue to represent one of the most useful contributions of physics. hysics in the twentieth century will That such a versatile discipline as statisti- probably be remembered for quantum cal physics should have remained so well hid- Pmechanics, relativity and the Standard den that only aficionados recognize its Model of particle physics. Yet the conceptual importance is a puzzle for science historians framework within which most physicists to ponder. (The topic has, for example, in operate is not necessarily defined by the first one way or another furnished 16 Nobel of these and makes reference only rarely to the prizes in physics and chemistry.) Perhaps it second two. The advances that have taken says something about the discipline’s place in cosmology, high-energy physics and humble beginnings, stemming from the quantum theory are distinguished in being work of Rudolf Clausius, James Clerk important not only scientifically but also Maxwell and Ludwig Boltzmann on the philosophically, and surely that is why they kinetic theory of gases. In attempting to have impinged so forcefully on the derive the gas laws of Robert Boyle and consciousness of our culture. Joseph Louis Gay-Lussac from an analysis of But the central scaffold of modern the energy and motion of individual physics is a less familiar construction — one particles, Clausius was putting thermody- that does not bear directly on the grand ques- namics on a microscopic basis. -

Kinetic Theory of Gases and Thermodynamics
Kinetic Theory of Gases Thermodynamics State Variables Kinetic Theory of Gases and Thermodynamics Zeroth law of thermodynamics Reversible and Irreversible processes Bedanga Mohanty First law of Thermodynamics Second law of Thermodynamics School of Physical Sciences Entropy NISER, Jatni, Orissa Thermodynamic Potential Course on Kinetic Theory of Gasses and Thermodynamics - P101 Third Law of Thermodynamics Phase diagram 1/112 Principles of thermodynamics, thermodynamic state, extensive/intensive variables. internal energy, Heat, work First law of thermodynamics, heat engines Second law of thermodynamics, entropy Thermodynamic potentials References: Thermodynamics, kinetic theory and statistical thermodynamics by Francis W. Sears, Gerhard L. Salinger Thermodynamics and introduction to thermostatistics, Herbert B. Callen Heat and Thermodynamics: an intermediate textbook by Mark W. Zemansky and Richard H. Dittman About 5-7 Tutorials One Quiz (10 Marks) and 2 Assignments (5 Marks) End Semester Exam (40 Marks) Course Content Suppose to be 12 lectures. Kinetic Theory of Gases Kinetic Theory of Gases Thermodynamics State Variables Zeroth law of thermodynamics Reversible and Irreversible processes First law of Thermodynamics Second law of Thermodynamics Entropy Thermodynamic Potential Third Law of Thermodynamics Phase diagram 2/112 internal energy, Heat, work First law of thermodynamics, heat engines Second law of thermodynamics, entropy Thermodynamic potentials References: Thermodynamics, kinetic theory and statistical thermodynamics by Francis W. Sears, Gerhard L. Salinger Thermodynamics and introduction to thermostatistics, Herbert B. Callen Heat and Thermodynamics: an intermediate textbook by Mark W. Zemansky and Richard H. Dittman About 5-7 Tutorials One Quiz (10 Marks) and 2 Assignments (5 Marks) End Semester Exam (40 Marks) Course Content Suppose to be 12 lectures. -

2. Classical Gases
2. Classical Gases Our goal in this section is to use the techniques of statistical mechanics to describe the dynamics of the simplest system: a gas. This means a bunch of particles, flying around in a box. Although much of the last section was formulated in the language of quantum mechanics, here we will revert back to classical mechanics. Nonetheless, a recurrent theme will be that the quantum world is never far behind: we’ll see several puzzles, both theoretical and experimental, which can only truly be resolved by turning on ~. 2.1 The Classical Partition Function For most of this section we will work in the canonical ensemble. We start by reformu- lating the idea of a partition function in classical mechanics. We’ll consider a simple system – a single particle of mass m moving in three dimensions in a potential V (~q ). The classical Hamiltonian of the system3 is the sum of kinetic and potential energy, p~ 2 H = + V (~q ) 2m We earlier defined the partition function (1.21) to be the sum over all quantum states of the system. Here we want to do something similar. In classical mechanics, the state of a system is determined by a point in phase space.Wemustspecifyboththeposition and momentum of each of the particles — only then do we have enough information to figure out what the system will do for all times in the future. This motivates the definition of the partition function for a single classical particle as the integration over phase space, 1 3 3 βH(p,q) Z = d qd pe− (2.1) 1 h3 Z The only slightly odd thing is the factor of 1/h3 that sits out front. -

Causal Relativistic Hydrodynamics of Conformal Fermi-Dirac Gases
Causal Relativistic Hydrodynamics of Conformal Fermi-Dirac Gases Milton Aguilar∗ and Esteban Calzettay Universidad de Buenos Aires. Facultad de Ciencias Exactas y Naturales. Departamento de F´ısica. Buenos Aires, Argentina. CONICET - Universidad de Buenos Aires. Facultad de Ciencias Exactas y Naturales. Instituto de F´ısica de Buenos Aires (IFIBA). Buenos Aires, Argentina. Abstract In this paper we address the derivation of causal relativistic hydrodynamics, formulated within the framework of Divergence Type Theories (DTTs), from kinetic theory for spinless particles obey- ing Fermi-Dirac statistics. The approach leads to expressions for the particle current and energy momentum tensor that are formally divergent, but may be given meaning through a process of reg- ularization and renormalization. We demonstrate the procedure through an analysis of the stability of an homogeneous anisotropic configuration. In the DTT framework, as in kinetic theory, these configurations are stable. By contrast, hydrodynamics as derived from the Grad approximation would predict that highly anisotropic configurations are unstable. arXiv:1701.01916v2 [hep-ph] 21 Mar 2017 ∗ E-mail me at: [email protected] y E-mail me at: [email protected] 1 I. INTRODUCTION The successful application of relativistic hydrodynamics [1{7] to the description of high energy heavy ion collisions [8{11] has led not only to a revival of this theory, but also to the demand of enlarging its domain of applicability to regimes where the system of interest is still away from local thermal equilibrium [12{14], and so the usual strategy of deriving hydrodynamics as an expansion in deviations from ideal behavior is not available. -

Visualizing the Kinetic Theory of Gases by Student-Created Computer Programs
Paper ID #18308 Visualizing the kinetic theory of gases by student-created computer programs Dr. Gunter¨ Bischof, Joanneum University of Applied Sciences Throughout his career, Dr. Gunter¨ Bischof has combined his interest in science and engineering appli- cation. He studied physics at the University of Vienna, Austria, and acquired industry experience as development engineer at Siemens Corporation. Currently he teaches Engineering Mathematics at Joan- neum University of Applied Sciences. His research interests focus on automotive engineering, materials physics, and on engineering education. Mr. Christian J. Steinmann, HM&S IT-Consulting Christian Steinmann has an engineer degree in mathematics from the Technical University Graz, where he focused on software quality and software development process assessment and improvement. He is man- ager of HM&S IT-Consulting and provides services for SPiCE/ISO 15504 and CMMI for development as a SEI-certified instructor. He performed more than 100 process assessments in software development de- partments for different companies in the finance, insurance, research, automotive, and automation sector. Currently, his main occupation is a consulting project for process improvement for safety related embed- ded software development for an automobile manufacturer. On Fridays, he is teaching computer science introductory and programming courses at Joanneum University of Applied Sciences in Graz, Austria. c American Society for Engineering Education, 2017 Visualizing the kinetic theory of gases by student-created computer programs Most introductory thermodynamics courses use the historical derivation of thermodynamics that relies on macroscopic properties of substances. Classical thermodynamics is a phenomenological theory; it studies the properties of a thermodynamic system without going into the mechanism of the observed phenomena. -

Statistical Physics Syllabus Lectures and Recitations
Graduate Statistical Physics Syllabus Lectures and Recitations Lectures will be held on Tuesdays and Thursdays from 9:30 am until 11:00 am via Zoom: https://nyu.zoom.us/j/99702917703. Recitations will be held on Fridays from 3:30 pm until 4:45 pm via Zoom. Recitations will begin the second week of the course. David Grier's office hours will be held on Mondays from 1:30 pm to 3:00 pm in Physics 873. Ankit Vyas' office hours will be held on Fridays from 1:00 pm to 2:00 pm in Physics 940. Instructors David G. Grier Office: 726 Broadway, room 873 Phone: (212) 998-3713 email: [email protected] Ankit Vyas Office: 726 Broadway, room 965B Email: [email protected] Text Most graduate texts in statistical physics cover the material of this course. Suitable choices include: • Mehran Kardar, Statistical Physics of Particles (Cambridge University Press, 2007) ISBN 978-0-521-87342-0 (hardcover). • Mehran Kardar, Statistical Physics of Fields (Cambridge University Press, 2007) ISBN 978- 0-521-87341-3 (hardcover). • R. K. Pathria and Paul D. Beale, Statistical Mechanics (Elsevier, 2011) ISBN 978-0-12- 382188-1 (paperback). Undergraduate texts also may provide useful background material. Typical choices include • Frederick Reif, Fundamentals of Statistical and Thermal Physics (Waveland Press, 2009) ISBN 978-1-57766-612-7. • Charles Kittel and Herbert Kroemer, Thermal Physics (W. H. Freeman, 1980) ISBN 978- 0716710882. • Daniel V. Schroeder, An Introduction to Thermal Physics (Pearson, 1999) ISBN 978- 0201380279. Outline 1. Thermodynamics 2. Probability 3. Kinetic theory of gases 4. -

Physics, Chapter 16: Kinetic Theory of Gases
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 16: Kinetic Theory of Gases Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 16: Kinetic Theory of Gases" (1958). Robert Katz Publications. 166. https://digitalcommons.unl.edu/physicskatz/166 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 16 Kinetic Theory of Gases 16-1 General Gas Law The behavior of a gas under various condition8 of temperature and pressure has already been studied in 80me detail. When the pressure of a constant mass of gas is not too great, say less than about 2 atm, we find that a gas obeys the following relationships: at constant temperature PV = constant; (16-1) at constant volume P = KT; (16-2) at constant pressure V = K'T. (16-3) These three equations are special cases of a single experimental equation which gives the relationship between the pressure P, the volume V, and the Fig. 16-1 Two steps in the derivation of the general gas law; an isothermal process followed by a constant-pressure process. absolute temperature T of a constant mass of gas. -
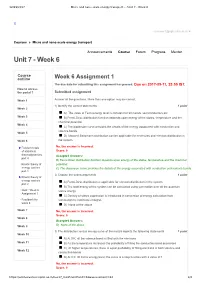
Assignment-6
12/29/2017 Micro and nano scale energy transport - - Unit 7 - Week 6 X [email protected] ▼ Courses » Micro and nano scale energy transport Announcements Course Forum Progress Mentor Unit 7 - Week 6 Course outline Week 6 Assignment 1 The due date for submitting this assignment has passed. Due on 2017-09-11, 23:59 IST. How to access the portal ? Submitted assignment Week 1 Answer all the questions. More than one option may be correct. 1) Identify the correct statements 1 point Week 2 A) The value of Fermi energy level is constant for all metals, semiconductors etc. Week 3 B) Fermi-Dirac distribution function depends upon energy of the states, temperature and the chemical potential. Week 4 C) The dispersion curve provides the details of the energy associated with conduction and valence bands Week 5 D) Maxwell Boltzmann distribution can be applicable for molecules and electron distribution in Week 6 the system. Fundamentals No, the answer is incorrect. of statistical Score: 0 thermodynamics Accepted Answers: part 4 B) Fermi-Dirac distribution function depends upon energy of the states, temperature and the chemical Kinetic theory of potential. energy carriers C) The dispersion curve provides the details of the energy associated with conduction and valence bands part 1 2) Choose the wrong arguments 1 point Kinetic theory of energy carriers A) Fermi-Dirac distribution is applicable for electron distribution in the system part 2 B) The total energy of the system can be calculated using summation over all the quantum Quiz : Week 6 states energy. Assignment 1 C) Density of states expression is introduced in conversion of energy calculation from Feedback for summation to continuous integral. -
Lecture 25 - Kinetic Theory of Gases; Pressure
PHYS 172: Modern Mechanics Fall 2010 Lecture 25 - Kinetic theory of gases; pressure Chapter 12.8, bits of Chapter 13 CLICKER QUESTION #1 Reading Question (Sections 12.7–12.8) There is only a trace amount of helium in the air we breathe. Why? A. There never was much helium on Earth to begin with. B. At ordinary temperatures, most helium atoms have speeds greater than the escape velocity. C. Most of the helium can be found at very high altitudes, not at the surface. D. The low mass helium atoms are more likely to gradually escape from the Earth. E. Since helium does not bond to other elements, it is less likely to be trapped on Earth. CLICKER QUESTION #1 Reading Question (Sections 12.7–12.8) There is only a trace amount of helium in the air we breathe. Why? B. At ordinary temperatures, most helium atoms have speeds greater than the escape velocity. NO!! But A FEW do. D. The low mass helium atoms are more likely to gradually escape from the Earth. The rare tail of the Maxwell Boltzmann distribution. Summary of Statistical Mechanics (Chapter 12 - Entropy) (q + N − 1)! Ω= Counting states q!(N − 1)1 S = kB lnΩ Entropy 1 ∂S ≡ T ∂Eint Temperature ΔE ΔEatom 1 system C = = Heat capacity ΔT N ΔT ΔE − P(ΔE) ∝ e kT Boltzmann distribution Rhetorical Question How do we know that the definition of temperature that we got from statistics & entropy agrees with standard definitions? 1 ∂S ≡ T ∂Eint The most common definition of temperature comes from the ideal gas law: PV=(#ofMoles)RT, or P = nkT. -

Physics of Gases Notes
Physics of Gases These are the statistical mechanics notes of Clay Byers and atomic spectra and structure notes of Will Coogan from Fall 2013. Please notify Will of any errors at [email protected] January 26, 2015 ii Contents I Statistical Mechanics 1 1 Introduction 3 1.1 Course Overview . 3 1.2 Collisions . 3 1.3 Preliminary Mathematics and Review . 8 1.3.1 The Schr¨odingerEquation . 8 1.3.2 Stirling's Approximation and Distributions . 9 1.3.3 Lagrange Multipliers . 10 1.3.4 Degeneracy . 12 2 Ensembles 15 2.1 Canonical Ensemble . 15 2.2 Other Ensembles . 19 3 Boltzmann, F-D, and B-E Statistics 23 3.1 Boltzmann Statistics . 23 3.2 Fermi-Dirac and Bose-Einstein Statistics . 24 iii iv CONTENTS 4 Monatomic and Diatomic Gases 27 4.1 Ideal Monatomic Gas . 27 4.1.1 Translational Partition Function . 27 4.1.2 Electronic Partition Function . 29 4.1.3 Nuclear Partition Function . 29 4.2 Ideal Diatomic Gas . 30 st 4.2.1 1 Assumption: Born-Oppenheimer Approximation (matom me) ................................ 30 4.2.2 2nd Assumption: Rigid Rotor - Harmonic Oscillator (RRHO) Approximation . 31 4.2.3 Vibrational Partition Function . 32 4.2.4 Rotational Partition Function: Heteronuclear . 33 4.2.5 Rotational Partition Function: Homonuclear . 34 4.2.6 Putting it all Together . 35 II Kinetic Theory of Gases 37 5 Overview of Kinetic Theory of Gases 39 6 Classical Statistical Mechanics 43 6.1 Classical Partition Function . 43 6.2 Phase Space and Liouville Equation . 46 6.3 Equipartition of Energy . -

Physics 5D - Heat, Thermodynamics, and Kinetic Theory Homework Will Be Posted at the Phys5d Website
Physics 5D - Heat, Thermodynamics, and Kinetic Theory Homework will be posted at the Phys5D website http://physics.ucsc.edu/~joel/Phys5D. Solutions are due at the beginning of class. Late homework will not be accepted since solutions will be posted on the class website (password: Entropy) just after the homework is due, so that you can see how to do the problems while they are still fresh in your mind. Course Schedule Date Topic Readings 1. Sept 30 Temperature, Thermal Expansion, Ideal Gas Law 17.1-17.10 2. Oct 7 Kinetic Theory of Gases, Changes of Phase 18.1-18.5 3. Oct 14 Mean Free Path, Internal Energy of Gases 18.6-19.3 4. Oct 21 Heat and the 1st Law of Thermodynamics 19.4-19.9 5. Oct 28 Heat Transfer; Heat Engines, Carnot Cycle 19.10-20.2 6. Nov 4 Midterm Exam (in class, one page of notes allowed) 7. Nov 18 The 2nd Law of Thermodynamics, Heat Pumps 20.3-20.5 8. Nov 25 Entropy, Disorder, Statistical Interpretation of 2nd Law 20.6-20.10 9. Dec 2 Thermodynamics of Earth and Cosmos; Overview of the Course 10. Dec 11 Final Exam (5-8 pm, in class, two pages of notes allowed) Copyright © 2009 Pearson Education, Inc. Monday, September 30, 13 Website for homeworks: http://physics.ucsc.edu/~joel/Phys5D TextCopyright Text © 2009 Text Pearson Text Education, Inc. Monday, September 30, 13 Giancoli - Chapter 17 Temperature, Thermal Expansion, and the Ideal Gas Law Copyright © 2009 Pearson Education, Inc. Monday, September 30, 13 17-1 Atomic Theory of Matter Atomic and molecular masses are measured in unified atomic mass units (u).