Linear and Quadratic Functions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lesson 1.2 – Linear Functions Y M a Linear Function Is a Rule for Which Each Unit 1 Change in Input Produces a Constant Change in Output
Lesson 1.2 – Linear Functions y m A linear function is a rule for which each unit 1 change in input produces a constant change in output. m 1 The constant change is called the slope and is usually m 1 denoted by m. x 0 1 2 3 4 Slope formula: If (x1, y1)and (x2 , y2 ) are any two distinct points on a line, then the slope is rise y y y m 2 1 . (An average rate of change!) run x x x 2 1 Equations for lines: Slope-intercept form: y mx b m is the slope of the line; b is the y-intercept (i.e., initial value, y(0)). Point-slope form: y y0 m(x x0 ) m is the slope of the line; (x0, y0 ) is any point on the line. Domain: All real numbers. Graph: A line with no breaks, jumps, or holes. (A graph with no breaks, jumps, or holes is said to be continuous. We will formally define continuity later in the course.) A constant function is a linear function with slope m = 0. The graph of a constant function is a horizontal line, and its equation has the form y = b. A vertical line has equation x = a, but this is not a function since it fails the vertical line test. Notes: 1. A positive slope means the line is increasing, and a negative slope means it is decreasing. 2. If we walk from left to right along a line passing through distinct points P and Q, then we will experience a constant steepness equal to the slope of the line. -

The Linear Algebra Version of the Chain Rule 1
Ralph M Kaufmann The Linear Algebra Version of the Chain Rule 1 Idea The differential of a differentiable function at a point gives a good linear approximation of the function – by definition. This means that locally one can just regard linear functions. The algebra of linear functions is best described in terms of linear algebra, i.e. vectors and matrices. Now, in terms of matrices the concatenation of linear functions is the matrix product. Putting these observations together gives the formulation of the chain rule as the Theorem that the linearization of the concatenations of two functions at a point is given by the concatenation of the respective linearizations. Or in other words that matrix describing the linearization of the concatenation is the product of the two matrices describing the linearizations of the two functions. 1. Linear Maps Let V n be the space of n–dimensional vectors. 1.1. Definition. A linear map F : V n → V m is a rule that associates to each n–dimensional vector ~x = hx1, . xni an m–dimensional vector F (~x) = ~y = hy1, . , yni = hf1(~x),..., (fm(~x))i in such a way that: 1) For c ∈ R : F (c~x) = cF (~x) 2) For any two n–dimensional vectors ~x and ~x0: F (~x + ~x0) = F (~x) + F (~x0) If m = 1 such a map is called a linear function. Note that the component functions f1, . , fm are all linear functions. 1.2. Examples. 1) m=1, n=3: all linear functions are of the form y = ax1 + bx2 + cx3 for some a, b, c ∈ R. -

9 Power and Polynomial Functions
Arkansas Tech University MATH 2243: Business Calculus Dr. Marcel B. Finan 9 Power and Polynomial Functions A function f(x) is a power function of x if there is a constant k such that f(x) = kxn If n > 0, then we say that f(x) is proportional to the nth power of x: If n < 0 then f(x) is said to be inversely proportional to the nth power of x. We call k the constant of proportionality. Example 9.1 (a) The strength, S, of a beam is proportional to the square of its thickness, h: Write a formula for S in terms of h: (b) The gravitational force, F; between two bodies is inversely proportional to the square of the distance d between them. Write a formula for F in terms of d: Solution. 2 k (a) S = kh ; where k > 0: (b) F = d2 ; k > 0: A power function f(x) = kxn , with n a positive integer, is called a mono- mial function. A polynomial function is a sum of several monomial func- tions. Typically, a polynomial function is a function of the form n n−1 f(x) = anx + an−1x + ··· + a1x + a0; an 6= 0 where an; an−1; ··· ; a1; a0 are all real numbers, called the coefficients of f(x): The number n is a non-negative integer. It is called the degree of the polynomial. A polynomial of degree zero is just a constant function. A polynomial of degree one is a linear function, of degree two a quadratic function, etc. The number an is called the leading coefficient and a0 is called the constant term. -

Polynomials.Pdf
POLYNOMIALS James T. Smith San Francisco State University For any real coefficients a0,a1,...,an with n $ 0 and an =' 0, the function p defined by setting n p(x) = a0 + a1 x + AAA + an x for all real x is called a real polynomial of degree n. Often, we write n = degree p and call an its leading coefficient. The constant function with value zero is regarded as a real polynomial of degree –1. For each n the set of all polynomials with degree # n is closed under addition, subtraction, and multiplication by scalars. The algebra of polynomials of degree # 0 —the constant functions—is the same as that of real num- bers, and you need not distinguish between those concepts. Polynomials of degrees 1 and 2 are called linear and quadratic. Polynomial multiplication Suppose f and g are nonzero polynomials of degrees m and n: m f (x) = a0 + a1 x + AAA + am x & am =' 0, n g(x) = b0 + b1 x + AAA + bn x & bn =' 0. Their product fg is a nonzero polynomial of degree m + n: m+n f (x) g(x) = a 0 b 0 + AAA + a m bn x & a m bn =' 0. From this you can deduce the cancellation law: if f, g, and h are polynomials, f =' 0, and fg = f h, then g = h. For then you have 0 = fg – f h = f ( g – h), hence g – h = 0. Note the analogy between this wording of the cancellation law and the corresponding fact about multiplication of numbers. One of the most useful results about integer multiplication is the unique factoriza- tion theorem: for every integer f > 1 there exist primes p1 ,..., pm and integers e1 em e1 ,...,em > 0 such that f = pp1 " m ; the set consisting of all pairs <pk , ek > is unique. -

Characterization of Non-Differentiable Points in a Function by Fractional Derivative of Jumarrie Type
Characterization of non-differentiable points in a function by Fractional derivative of Jumarrie type Uttam Ghosh (1), Srijan Sengupta(2), Susmita Sarkar (2), Shantanu Das (3) (1): Department of Mathematics, Nabadwip Vidyasagar College, Nabadwip, Nadia, West Bengal, India; Email: [email protected] (2):Department of Applied Mathematics, Calcutta University, Kolkata, India Email: [email protected] (3)Scientist H+, RCSDS, BARC Mumbai India Senior Research Professor, Dept. of Physics, Jadavpur University Kolkata Adjunct Professor. DIAT-Pune Ex-UGC Visiting Fellow Dept. of Applied Mathematics, Calcutta University, Kolkata India Email (3): [email protected] The Birth of fractional calculus from the question raised in the year 1695 by Marquis de L'Hopital to Gottfried Wilhelm Leibniz, which sought the meaning of Leibniz's notation for the derivative of order N when N = 1/2. Leibnitz responses it is an apparent paradox from which one day useful consequences will be drown. Abstract There are many functions which are continuous everywhere but not differentiable at some points, like in physical systems of ECG, EEG plots, and cracks pattern and for several other phenomena. Using classical calculus those functions cannot be characterized-especially at the non- differentiable points. To characterize those functions the concept of Fractional Derivative is used. From the analysis it is established that though those functions are unreachable at the non- differentiable points, in classical sense but can be characterized using Fractional derivative. In this paper we demonstrate use of modified Riemann-Liouvelli derivative by Jumarrie to calculate the fractional derivatives of the non-differentiable points of a function, which may be one step to characterize and distinguish and compare several non-differentiable points in a system or across the systems. -

1 Think About a Linear Function and Its First and Second Derivative The
Think about a linear function and its first and second derivative The second derivative of a linear function always equals 0 Anytime you are trying to find the limit of a piecewise function, find the limit approaching from the left and right if they are equal then the limit exists Remember you can't differentiate at a vertical tangent line Differentiabilty implies continuity the graph isn't continuous at x = 0 1 To find the velocity, take the first derivative of the position function. To find where the velocity equals zero, set the first derivative equal to zero 2 From the graph, we know that f (1) = 0; Since the graph is increasing, we know that f '(1) is positive; since the graph is concave down, we know that f ''(1) is negative Possible points of inflection need to set up a table to see where concavity changes (that verifies points of inflection) (∞, 1) (1, 0) (0, 2) (2, ∞) + + + concave up concave down concave up concave up Since the concavity changes when x = 1 and when x = 0, they are points of inflection. x = 2 is not a point of inflection 3 We need to find the derivative, find the critical numbers and use them in the first derivative test to find where f (x) is increasing and decreasing (∞, 0) (0, ∞) + Decreasing Increasing 4 This is the graph of y = cos x, shifted right (A) and (C) are the only graphs of sin x, and (A) is the graph of sin x, which reflects across the xaxis 5 Take the derivative of the velocity function to find the acceleration function There are no critical numbers, because v '(t) doesn't ever equal zero (you can verify this by graphing v '(t) there are no xintercepts). -

Algebra Vocabulary List (Definitions for Middle School Teachers)
Algebra Vocabulary List (Definitions for Middle School Teachers) A Absolute Value Function – The absolute value of a real number x, x is ⎧ xifx≥ 0 x = ⎨ ⎩−<xifx 0 http://www.math.tamu.edu/~stecher/171/F02/absoluteValueFunction.pdf Algebra Lab Gear – a set of manipulatives that are designed to represent polynomial expressions. The set includes representations for positive/negative 1, 5, 25, x, 5x, y, 5y, xy, x2, y2, x3, y3, x2y, xy2. The manipulatives can be used to model addition, subtraction, multiplication, division, and factoring of polynomials. They can also be used to model how to solve linear equations. o For more info: http://www.stlcc.cc.mo.us/mcdocs/dept/math/homl/manip.htm http://www.awl.ca/school/math/mr/alg/ss/series/algsrtxt.html http://www.picciotto.org/math-ed/manipulatives/lab-gear.html Algebra Tiles – a set of manipulatives that are designed for modeling algebraic expressions visually. Each tile is a geometric model of a term. The set includes representations for positive/negative 1, x, and x2. The manipulatives can be used to model addition, subtraction, multiplication, division, and factoring of polynomials. They can also be used to model how to solve linear equations. o For more info: http://math.buffalostate.edu/~it/Materials/MatLinks/tilelinks.html http://plato.acadiau.ca/courses/educ/reid/Virtual-manipulatives/tiles/tiles.html Algebraic Expression – a number, variable, or combination of the two connected by some mathematical operation like addition, subtraction, multiplication, division, exponents and/or roots. o For more info: http://www.wtamu.edu/academic/anns/mps/math/mathlab/beg_algebra/beg_alg_tut11 _simp.htm http://www.math.com/school/subject2/lessons/S2U1L1DP.html Area Under the Curve – suppose the curve y=f(x) lies above the x axis for all x in [a, b]. -

Real Zeros of Polynomial Functions
333353_0200.qxp 1/11/07 2:00 PM Page 91 Polynomial and Chapter 2 Rational Functions y y y 2.1 Quadratic Functions 2 2 2 2.2 Polynomial Functions of Higher Degree x x x −44−2 −44−2 −44−2 2.3 Real Zeros of Polynomial Functions 2.4 Complex Numbers 2.5 The Fundamental Theorem of Algebra Polynomial and rational functions are two of the most common types of functions 2.6 Rational Functions and used in algebra and calculus. In Chapter 2, you will learn how to graph these types Asymptotes of functions and how to find the zeros of these functions. 2.7 Graphs of Rational Functions 2.8 Quadratic Models David Madison/Getty Images Selected Applications Polynomial and rational functions have many real-life applications. The applications listed below represent a small sample of the applications in this chapter. ■ Automobile Aerodynamics, Exercise 58, page 101 ■ Revenue, Exercise 93, page 114 ■ U.S. Population, Exercise 91, page 129 ■ Impedance, Exercises 79 and 80, page 138 ■ Profit, Exercise 64, page 145 ■ Data Analysis, Exercises 41 and 42, page 154 ■ Wildlife, Exercise 43, page 155 ■ Comparing Models, Exercise 85, page 164 ■ Media, Aerodynamics is crucial in creating racecars.Two types of racecars designed and built Exercise 18, page 170 by NASCAR teams are short track cars, as shown in the photo, and super-speedway (long track) cars. Both types of racecars are designed either to allow for as much downforce as possible or to reduce the amount of drag on the racecar. 91 333353_0201.qxp 1/11/07 2:02 PM Page 92 92 Chapter 2 Polynomial and Rational Functions 2.1 Quadratic Functions The Graph of a Quadratic Function What you should learn Analyze graphs of quadratic functions. -

Generic Continuous Functions and Other Strange Functions in Classical Real Analysis
Georgia State University ScholarWorks @ Georgia State University Mathematics Theses Department of Mathematics and Statistics 4-17-2008 Generic Continuous Functions and other Strange Functions in Classical Real Analysis Douglas Albert Woolley Follow this and additional works at: https://scholarworks.gsu.edu/math_theses Part of the Mathematics Commons Recommended Citation Woolley, Douglas Albert, "Generic Continuous Functions and other Strange Functions in Classical Real Analysis." Thesis, Georgia State University, 2008. https://scholarworks.gsu.edu/math_theses/44 This Thesis is brought to you for free and open access by the Department of Mathematics and Statistics at ScholarWorks @ Georgia State University. It has been accepted for inclusion in Mathematics Theses by an authorized administrator of ScholarWorks @ Georgia State University. For more information, please contact [email protected]. GENERIC CONTINUOUS FUNCTIONS AND OTHER STRANGE FUNCTIONS IN CLASSICAL REAL ANALYSIS by Douglas A. Woolley Under the direction of Mihaly Bakonyi ABSTRACT In this paper we examine continuous functions which on the surface seem to defy well-known mathematical principles. Before describing these functions, we introduce the Baire Cate- gory theorem and the Cantor set, which are critical in describing some of the functions and counterexamples. We then describe generic continuous functions, which are nowhere differ- entiable and monotone on no interval, and we include an example of such a function. We then construct a more conceptually challenging function, one which is everywhere differen- tiable but monotone on no interval. We also examine the Cantor function, a nonconstant continuous function with a zero derivative almost everywhere. The final section deals with products of derivatives. INDEX WORDS: Baire, Cantor, Generic Functions, Nowhere Differentiable GENERIC CONTINUOUS FUNCTIONS AND OTHER STRANGE FUNCTIONS IN CLASSICAL REAL ANALYSIS by Douglas A. -

Chapter 3. Linearization and Gradient Equation Fx(X, Y) = Fxx(X, Y)
Oliver Knill, Harvard Summer School, 2010 An equation for an unknown function f(x, y) which involves partial derivatives with respect to at least two variables is called a partial differential equation. If only the derivative with respect to one variable appears, it is called an ordinary differential equation. Examples of partial differential equations are the wave equation fxx(x, y) = fyy(x, y) and the heat Chapter 3. Linearization and Gradient equation fx(x, y) = fxx(x, y). An other example is the Laplace equation fxx + fyy = 0 or the advection equation ft = fx. Paul Dirac once said: ”A great deal of my work is just playing with equations and see- Section 3.1: Partial derivatives and partial differential equations ing what they give. I don’t suppose that applies so much to other physicists; I think it’s a peculiarity of myself that I like to play about with equations, just looking for beautiful ∂ mathematical relations If f(x, y) is a function of two variables, then ∂x f(x, y) is defined as the derivative of the function which maybe don’t have any physical meaning at all. Sometimes g(x) = f(x, y), where y is considered a constant. It is called partial derivative of f with they do.” Dirac discovered a PDE describing the electron which is consistent both with quan- respect to x. The partial derivative with respect to y is defined similarly. tum theory and special relativity. This won him the Nobel Prize in 1933. Dirac’s equation could have two solutions, one for an electron with positive energy, and one for an electron with ∂ antiparticle One also uses the short hand notation fx(x, y)= ∂x f(x, y). -

1 Uniform Continuity
Math 0450 Honors intro to analysis Spring, 2009 Notes 17 1 Uniform continuity Read rst: 5.4 Here are some examples of continuous functions, some of which we have done before. 1. A = (0; 1]; f : A R given by f (x) = 1 . ! x Proof. To prove that f is continuous at c (0; 1], suppose that " > 0, and 2 2 let = min c ; c " : If x c < , then rst of all, x > c and so 0 < 1 < 2 . 2 2 j j 2 x c Hence, n o 1 1 c x 1 1 2 1 c2" = = c x < = ": x c xc x c j j c c 2 2. f : R R given by f (x) = x2: ! Proof. Observe that x2 c2 = x c (x + c) : j j j j " If c = 0; let = p": If c = 0; let = min c ; 2 c If c = 0 and x c < , 6 j j j j j j then x < p" and x2 c2 = x2 < ", Ifnc = 0; theno j j j j j j 6 " x2 c2 = x + c x c < 2 c = ": j j j j j j 2 c j j 3. A = [1; ); f (x) = 1 . 1 x Proof. This makes use of item 1 above. Suppose that c A. From item 1, 2 2 we see that if " > 0, and x c < min c ; c " , then 1 1 < ". Hence, j j 2 2 x c 2 let = " : If x c < , and x and c aren in A, theno x c < min c ; c " ; so 2 j j j j 2 2 1 1 < ": n o x c 1 1 4. -
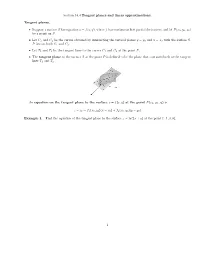
Section 14.4 Tangent Planes and Linear Approximations
Section 14.4 Tangent planes and linear approximations. Tangent planes. • Suppose a surface S has equation z = f(x, y), where f has continuous first partial derivatives, and let P (x0,y0,z0) be a point on S. • Let C1 and C2 be the curves obtained by intersecting the vertical planes y = y0 and x = x0 with the surface S. P lies on both C1 and C2. • Let T1 and T2 be the tangent lines to the curves C1 and C2 at the point P . • The tangent plane to the surface S at the point P is defined to be the plane that containts both of the tangent lines T1 and T2. An equation on the tangent plane to the surface z = f(x, y) at the point P (x0,y0,z0) is z − z0 = fx(x0,y0)(x − x0)+ fy(x0,y0)(y − y0) Example 1. Find the equation of the tangent plane to the surface z = ln(2x + y) at the point (−1, 3, 0). 1 Linear Approximations. An equation of a tangent plane to the graph of the function f of two variables at the point (a,b,f(a,b)) is z = f(a,b)+ fx(a,b)(x − a)+ fy(a,b)(y − b) The linear function L(x, y)= f(a,b)+ fx(a,b)(x − a)+ fy(a,b)(y − b) is called the linearization of f(a,b) and the approximation f(x, y) ≈ f(a,b)+ fx(a,b)(x − a)+ fy(a,b)(y − b) is called the linear approximation ot the tangent line approximation of f at (a,b).