Evaluation of Hygroscopic Cloud Seeding in Liquid
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
How to Make a Cloud
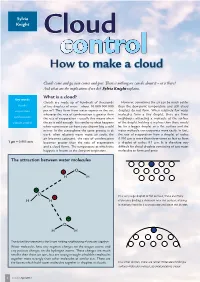
Sylvia Knight Cloud control How to make a cloud Clouds come and go, rain comes and goes. There is nothing we can do about it – or is there? And what are the implications if we do? Sylvia Knight explains. What is a cloud? Key words Clouds are made up of hundreds of thousands However, sometimes the air can be much colder clouds of tiny droplets of water – about 10 000 000 000 than the dew-point temperature and still cloud 3 evaporation per m ! They form from water vapour in the air, droplets do not form. When relatively few water whenever the rate of condensation is greater than molecules form a tiny droplet, there are fewer condensation the rate of evaporation – usually this means when neighbours attracting a molecule at the surface climate control the air is cold enough. It is similar to what happens of the droplet holding it in place than there would when warm moist air from your shower hits a cold be for a bigger droplet or a flat surface and the mirror. In the atmosphere the same process is at water molecule can evaporate more easily. In fact, work: when relatively warm moist air cools, the the rate of evaporation from a droplet of radius air becomes saturated, the rate of condensation 0.001 μm is more than three times as fast as from 1 μm = 0.001 mm becomes greater than the rate of evaporation a droplet of radius 0.1 μm. It is therefore very and a cloud forms. The temperature at which this difficult for cloud droplets consisting of just water happens is known as the dew-point temperature. -

WMA Capabilities Statement on Weather Modification Adopted April 2016
WMA Capabilities Statement on Weather Modification Adopted April 2016 Capabilities Statement Background Under certain atmospheric conditions cloud microphysical and precipitation processes can be intentionally modified using existing cloud seeding methodologies to yield beneficial effects. Beneficial effects are those in which favorable benefit/cost ratios are realized without producing detrimental environmental impacts. The magnitudes and temporal/spatial scales of beneficial cloud seeding effects vary between project types and location. This statement covers the intentional application of cloud seeding technology and techniques (described below) covering areas from a few to several thousands of square kilometers for periods of hours to days. Larger-scale efforts to intentionally modify weather and climate regionally or globally using cloud-seeding or other technology and techniques, commonly referred to as geoengineering, are excluded from this discussion. Increasing demands are being placed upon existing fresh water supplies throughout the world. These increasing demands lead to greater sensitivity to drought and to moderate precipitation shortfalls. Recent investigations have indicated that negative impacts of air pollution on precipitation downwind of some industrialized areas are probable. Concerns about water supplies are increasing interest in using cloud seeding techniques for precipitation augmentation. Hail damage to crops and property and fog-induced problems continue to produce interest in their mitigation. These factors, combined with the typically attractive benefit/cost ratios associated with operational cloud seeding projects, have fostered ongoing and growing interest in intentional weather modification. Brief capability statements regarding intentional weather modification by cloud seeding follow, summarizing the current state of the technology within the primary application categories. The summaries are limited to conventional cloud seeding methods that are based on accepted physical principles. -

Cloud Seeding ALBERTA CANADA the ENVIRONMENT
Weather Modification Cloud Seeding ALBERTA CANADA THE ENVIRONMENT ND & THE CLIMATE ID WY NV UT Cloud seeding—a form of weather modification— CA CO KS is a safe, scientific, time-tested, and proven set of technologies used to enhance rain and snow, re- TX duce hail damage, and alleviate fog. The benefits of cloud seeding can be measured in additional water for cities and agriculture, as well as the re- Target area—Cold-season cloud-seeding Target area—Warm-season cloud-seeding duction of damage from severe weather. NAWMC Members California Department of Water Resources Colorado Water Conservation Board Desert Research Institute North Dakota Atmospheric Resource Board Texas Department of Licensing and Regulation Utah Division of Water Resources Wyoming Water Development Office NAWMC Associate Members Central Arizona Water Conservation District Idaho Power Company Metropolitan Water District of Southern California Aircraft or ground-based generators are used to North Dakota Weather Modification Association burn a silver iodide solution to release microscopic silver-iodide particles that can assist in the formation Sandy Land Underground Water Conservation District of ice crystals in clouds. Santa Barbara County Water Agency NAWMC.org Snowpack Augmentation Inducing the formation of WEATHER MODIFICATION Rain Enhancement ice crystals in a cloud Cloud Seeding Hail Suppression Fog Dispersion Silver-iodide crystals The Science have a shape similar to The cloud-seeding process aids precipitation formation by ice crystals and provide The Climate enhancing ice crystal or raindrop production in clouds. This a “seed” or nucleus Cloud seeding modifies clouds individually or as part of a for ice formation when is accomplished by using glaciogenic (ice-forming) agents, given storm system. -

B-100063 Cloud-Seeding Activities Carried out in the United States
WASHINGXJN. O.C. 205.48 13-100063 Schweikcr: LM096545 This is in response to your request of September 22, .2-o 1971, for certain background informatio-n on cloud-seeding activities carried out -...-in _-..T---*the .Unitc.b_S~.~-~,.under programs supported-by the Federal agencies. Pursuant to the specific xz2- questions contained in your request, we directed our:review toward developing information-----a-=v-~ .,- , L-..-”on- .-cloud-seeding ,__ ._ programs sup- ported by Federal agencies, on the cost- ‘and purposes of such progrys, on the impact of cloud seeding on precipitation and severe storms, and on the types of chemicals used for seeding and their effect on the--environment. We also ob- tained dafa cdncerning the extent of cloud seeding conducted over Pennsylvania. Our review was conducted at various Federal departments ’ and agencies headquartered in Washington, D.C., and at cer- tain of their field offices in Colorado and Montana. We in- terviewed cognizant agency officials and reviewed appropriate records and files of the agencies. In addition, we reviewed pertinent reports and documentation of the Federal Council for Science and Technology, the National Academy of Sciences, and the National Water Commission. BACKGROUND AND COST DATA Several Federal agencies support weather modification programs which involve cloud-seeding activities. Major re- search programs include precipitation modification, fog and cloud modification, hail suppression, and lightning and hur- ricane modification. Statistics compiled by the Interdepartmental Committee for Atmospheric Sciences showed that costs for federally spon- sored weather modification rograms during fiscal years 1959 through 1970 totaled about %‘74 million; estimated costs for fiscal years 1971 and 1972 totaled about $35 million. -

The Snowy Precipitation Enhancement Research Program
4.5 THE SNOWY PRECIPITATION ENHANCEMENT RESEARCH PROJECT Mark Heggli*1, Barry Dunn2, Arlen Huggins3, John Denholm2, Loredana Angri2 and Trevor Luker2 1 – Innovative Hydrology, Auburn, California, United States 2 – Snowy Hydro Limited, Cooma, New South Wales, Australia 3 – Desert Research Institute, Reno, Nevada, United States 1. INTRODUCTION The potential and opportunity for seeding winter orographic clouds over the area have been well Investigations over the last 50 years have documented by Long and Huggins (1992) and confirmed the significant precipitation enhancement Warburton and Wetzel (1992). The mountain range potential of the Snowy Mountains region of Australia. provides essential lift, with the terrain ascending During 2004, special legislation authorizing Cloud approximately 1800 m over a rather short horizontal Seeding under very strict conditions was passed in New distance of about 15 km. The atmosphere in the lowest South Wales. Trial operations commenced during 2 km is the source of vast quantities of condensate June 2004, preceding a five year experiment to supply and associated production of supercooled liquid determine the economic and environmental viability of water. precipitation in a significant national park estate. The project infrastructure was constructed and installed over Australia has been involved in cloud seeding for a period of 14 weeks to satisfy time constraints set in over 57 years with the first investigations occurring in the enabling legislation. Meteorological data and 1947, shortly after the experiments of Schaefer (1946). operational experience gained during 2004 has been An experiment was carried out in the Snowy Mountains formative in developing the experimental design and using aircraft during the period 1955-1960, and results refining equipment and systems requirements for the from this investigation were extremely encouraging with five year experiment commencing in 2005. -

Cold Season Cloud Seeding
Weather Modification UNDERSTANDING Cloud seeding—a form of weather modification— ALBERTA CANADA COLD SEASON is a safe, scientific, time-tested, and proven set of Cloud Seeding technologies used to enhance rain and snow, re- ND duce hail damage, and alleviate fog. The benefits ID of cloud seeding can be measured in additional WY water for cities and agriculture, as well as the re- NV UT duction of damage from severe weather. CA CO KS TX Target area—Cold-season cloud-seeding Target area—Warm-season cloud-seeding A ground-based generator is used to burn a silver iodide solution to release microscopic silver-iodide particles which can create additional ice crystals, then snow, in winter clouds. Research has shown that placing equipment at high elevations increases cloud seeding effectiveness. NAWMC Members Cold Season Seeding California Department of Water Resources When moist air flows over the mountains, water vapor Colorado Water Conservation Board condenses and forms clouds composed of water droplets. These droplets become “super cooled” and have the unique Desert Research Institute quality to remain liquid even at temperatures below freez- North Dakota Atmospheric Resource Board ing. Given enough time and mixing with surrounding air, many of the droplets will evaporate, but under the correct Texas Department of Licensing and Regulation conditions some will eventually become ice crystals, grow Utah Division of Water Resources into snowflakes and precipitate to the ground. Cloud seed- Wyoming Water Development Office ing provides an opportunity to increase the number of ice crystals that can become snowflakes. NAWMC Associate Members Who Conducts Cloud Seeding? Central Arizona Water Conservation District In North America, cloud-seeding programs are conducted in Metropolitan Water District of Southern California California, Colorado, Idaho, Nevada, Utah, Wyoming, Kansas, Santa Barbara County Water Agency North Dakota, and Texas, as well as Alberta, Canada. -

Summary of the Effectiveness of Summer Cloud Seeding to Increase Rainfall and Reduce Hail by Darin Langerud, NAWMC-North Dakota and George Bomar, NAWMC-Texas
Summary of the Effectiveness of Summer Cloud Seeding to Increase Rainfall and Reduce Hail By Darin Langerud, NAWMC-North Dakota and George Bomar, NAWMC-Texas Introduction Modern efforts to increase rainfall and reduce damaging hail from summer thunderstorms date back to the late 1940s, built upon the landmark discoveries by General Electric scientists Langmuir, Schaefer and Vonnegut, which ushered in the scientific era of weather modification. In the six decades following their work, cloud seeding projects have proliferated across the United States and dozens of countries around the world. The 2003 National Research Council (NRC) (1) study “Critical Issues in Weather Modification Research” included the statement that “there is still no scientific proof of the efficacy of intentional weather modification efforts.” The issue of “scientific proof” was a subsequent point of significant debate between the NRC panel and the Weather Modification Association (WMA) (2). The WMA authored a detailed rebuttal to many of the NRC assertions leading to a joint paper published in the Bulletin of the American Meteorological Society (BAMS) (3), while the NAIWMC authored a response to the NRC report published on its web site (4). The purpose of this paper is to summarize the more important research and evaluation results of summer cloud seeding efforts that demonstrate its efficacy. The research cited here spans more than 50 years of work in the areas of rainfall enhancement and hail suppression. Much of the research summarized below was conducted through programs sponsored by the U.S. Bureau of Reclamation (USBR), the National Oceanic and Atmospheric Administration (NOAA), and state and local government entities. -

Cloud Seeding
07-15-15 BOARD Agenda Item 9 Cloud Seeding Presented by: Frank McDonough – Meteorologist Page 1 of 32 Outline 07-15-15 BOARD Agenda Item 9 - Background - Brief Tahoe Summary - Cloud seeding technology (table) Page 2 of 32 Background 07-15-15 BOARD Agenda Item 9 Page 3 of 32 Background 07-15-15 BOARD Agenda Item 9 Create small ice crystals Subfreezing liquid through seeding water clouds present – no precipitation DRI generator Crystals grow in presence of tiny subfreezing drops Crystals grow into large Snow crystals melts into which fall runoff as snow and add to Truckee River snowpack Page 4 of 32 CA/NV cloud seeding projects07-15-15 BOARD Agenda Item 9 West Coast operational cloud seeding projects over the past 20 years. Currently active in 11 to 14 watersheds Aircraft and ground-based Page 5 of 32 Idaho Cloud Seeding 07-15-15 BOARD Agenda Item 9 $1 million/ year Aircraft cloud seeding warmer winter storms Ground-based and aircraft cloud seeding for colder storms Page 6 of 32 Utah cloud seeding projects07-15-15 BOARD Agenda Item 9 Most of the higher terrain in the state is targeted. Page 7 of 32 Tahoe/Truckee seeding network07-15-15 BOARD Agenda Item 9 CSG Page 8 of 32 DRI cloud seeding 07-15-15 BOARD Agenda Item 9 Sited at locations that maximize seeding effectiveness Remote 24/7 operations by expert cloud seeding meteorologists DRI Cloud seeding generator: Generators and Ward (Sierra Crest near Alpine) communications equipment are reliable and serviced by experienced technicians Page 9 of 32 Tahoe/Truckee – 5 year SWE 07-15-15 BOARD -

Final Project Report
[ADVANCED STUDY ON PRECIPITATION ENHANCEMENT IN ARID AND SEMI-ARID REGIONS] F inal Report UAE Research Program for Rain Enhancement Science Reporting Period Start Date March 1st, 2019 End Date February 29th, 2020 Submittal Date March 1st, 2020 Meteoro logical Researc h Institute Principal Investigator Masataka MURAKAMI Co-Investigator(s) Taro SHINODA Students Postdocs Youko YOSHIZUMI (Feb. 2019 –Aug. 2019) Research Staff Youko YOSHIZUMI, Masaya KATO Subcontracting Institution #1 Name Principal Investigator Narihiro ORIKASA Co-Investigator(s) Takuya TAJIRI, Akihiro HASHIMOTO Students Postdocs Research Staff Yuji ZAIZEN, Wei-Chen KUO, Takuya KAWABATA, Kentaro ARAKI Subcontracting Institution #2 Name Principal Investigator Kentaro SUZUKI Co-Investigator(s) Students Postdocs Research Staff Junya UCHIDA, Xianwen JING, Akira YAMAUCHI 1 | Page EXECUTIVE SUMMARY Summary of Scientific and Technical Progress vs. Plan:【Data Analysis】 As scheduled in the plan for extended period, we performed a collocated analysis of CloudSat and geostationary satellite observations in an attempt to observationally probe the microphysical processes responsible for the warm rain formation for the purpose of identifying ‘seedable clouds’ suitable for the rain enhancement and their controlling microphysical processes. 【Laboratory Experiment】 As scheduled in the plan, to clarify the size dependency of hygroscopicity and chemical compositions of 3 types of flare particles, we have performed analysis of CCN counter measurement data using monodisperse particles, which were size-selected by DMA, and analysis of the EDS data of electron microscopy classified by particle sizes. 【Observation】 As scheduled in the plan, a further quality control of our aircraft data has been done, and the raw data and text data, including quick-look charts, were archived and uploaded on our web site. -

A Review of Cloud Seeding Experiments to Enhance Precipitation and Some New Prospects
A Review of Cloud Seeding Experiments to Enhance Precipitation and Some New Prospects Roelof T. Bruintjes National Center for Atmospheric Research,* Boulder, Colorado ABSTRACT Water is one of the most basic commodities on earth sustaining human life. In many regions of the world, traditional sources and supplies of ground water, rivers and reservoirs, are either inadequate or under threat from ever-increasing demands on water from changes in land use and growing populations. This has prompted scientists and engineers to explore the possibility of augmenting water supplies by means of cloud seeding. This paper provides an overview of the current scientific status of weather modification activities to enhance pre- cipitation for both glaciogenic and hygroscopic seeding experiments. It is important to emphasize that although funding for scientific studies has decreased substantially during the past decade, operational programs have actually increased. During the last 10 years there has been a thorough scrutiny of past experiments involving experiments using glaciogenic seeding. Although there still exist indications that seeding can increase precipitation, a number of recent studies have questioned many of the positive results, weakening the scientific credibility. As a result, considerable skep- ticism exists as to whether these methods provides a cost-effective means for increasing precipitation for water resources. Recent results from hygroscopic seeding experiments provided for some renewed optimism in the field of precipita- tion enhancement. Although promising results have been obtained to date, some fundamental questions remain that need to be answered in order to provide a sound scientific basis for this technology. 1. Introduction world where ground water is one of the primary sources of freshwater. -

A New Hail Suppression Project Using Aircraft
"NON-REVIEWED" ,’-~RIL 2000 [(RAUSS ET A NEWHAIL SUPPRESSIONPROJECT USING AIRCRAFTSEEDING IN ARGENTINA by ¯ Terry W. Krauss* RoelofT. Bruintjes HugoMartinez WeatherModification Inc. National Centerfor Atmos- UniversidadNacional de Fargo, North Dakota pheric Research Cuyo - CONICET Boulder, Colorado Mendoza,Argentina INTRODUCTION OPERATIONALSEEDING PROGRAMDETAILS The Province of Mendozain western Argentina (32 S., 68 deg W.) is one of the most hail prone The current operational seeding period is from areas of the world. Lossesto agriculture dueto October15 th to April 1~t. Themain radar is cen- hail historically are >10%of total annualagricul- trally located at Cruz Negra(33.447 deg south, tural production. The region is knownas the 68.967 deg west) near Tunuyan.The project area "Landof Wine"and the principal crops are grapes covers the three agricultural oasesof Mendoza- plus a large variety of fruit andvegetables (e.g. SanMartin in the north, Tunuyanin the center, apples, cherries, peaches,apricots, plums,mel- and SanRafael in the south. A mapof Mendoza ons, garlic, tomatoes). Theprovince comprises province and the target oasesis shownin Fig- diverse territory of mountains,upland areas, and ure 1. The programconsists of 3 Piper Cheyenne plains. The western border of Mendozais occu- II seedingaircraft, 1 LearJet research-seederair- pied by the mainAndean cordillera, with a number craft, two C-band weather radars with TITAN of peaks above 6400m.Climatic conditions are processingand display software, two Vaisala ra- ¯semi-arid, andthe annualrainfall for the Capital diosondesystems, plus all the necessarystaff. City Mendozais 200 mm. TwoCheyenne II are stationed at SanRafael, the Hail suppression programsus- ing Russian rocket technology have been conductedin the re- gion since 1985with someinter- ruptions (Makitov 1999). -

Report No. R 91-2, Design of Physical Cloud Seeding Experiments for The
DESIGN OF PHYSICAL CLOUD SEEDING EXPERIMENTS FOR THE ARIZONA ATMOSPHERIC MODIFICATION RESEARCH PROGRAM FINAL REPORT PREPARED FOR ARIZONA DEPARTMENT OF WATER RESOURCES UNDER IGA-89-6189-450-0125 FEBRUARY 1991 U.S. DEPARTMENT OF THE INTERIOR Bureau of Reclamation Denver Off ice Research and Laboratory Services Division Water Augmentation Group 7-2090 (4-81) Bureau of Reclamation TECHNICAL REPORT STANDARD TITLE PAGE February 1991 DESIGN OF PHYSICAL CLOUD SEEDING 6. PERFORMING ORGANIZATION CODE EXPERIMENTS FOR THE ARIZONA ATMOSPHERIC MODIFICATION RESEARCH PROGRAM 8. PERFORMING ORGANIZATION REPORT NO. Arlin B. Super, Jon G. Medina, and Jack T. McPartland 9. PERFORMING ORGANIZATION NAME AND ADDRESS 10. WORK UNIT NO. Bureau of Reclamation Denver Office 11. CONTRACT OR GRANT NO. Denver CO 80225 13. TYPE OF REPORT AND PERIOD COVERED 12. SPONSORING AGENCY NAME AND ADDRESS Same ( 14. SPONSORING AGENCY CODE 15. SUPPLEMENTARY NOTES Microfiche and hard copy available at the Denver Office, Denver, Colorado. 16. ABSTRACT Cloud seeding experiments have been designed by the Bureau of Reclamation for winter orographic cloud systems over the Mogollon Rim of Arizona. The experiments are intended to test whether key physical processes proceed as hypothesized during both ground-based and aircraft seeding with silver iodide. The experiments are also intended to document each significant link in the chain of physical events following release of seeding material up to, and including, snowfall at the ground at a small research area about 60 km south-southeast of Flagstaff. The physical experimentation should lead to a substantially improved understanding of winter seeding potential in clouds over Arizona's higher terrain.