The Differential Lambda-Mu-Calculus Lionel Vaux
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AIX Globalization
AIX Version 7.1 AIX globalization IBM Note Before using this information and the product it supports, read the information in “Notices” on page 233 . This edition applies to AIX Version 7.1 and to all subsequent releases and modifications until otherwise indicated in new editions. © Copyright International Business Machines Corporation 2010, 2018. US Government Users Restricted Rights – Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents About this document............................................................................................vii Highlighting.................................................................................................................................................vii Case-sensitivity in AIX................................................................................................................................vii ISO 9000.....................................................................................................................................................vii AIX globalization...................................................................................................1 What's new...................................................................................................................................................1 Separation of messages from programs..................................................................................................... 1 Conversion between code sets............................................................................................................. -

From Laptop to Lambda: Outsourcing Everyday Jobs to Thousands of Transient Functional Containers
From Laptop to Lambda: Outsourcing Everyday Jobs to Thousands of Transient Functional Containers Sadjad Fouladi Francisco Romero Dan Iter Qian Li Shuvo Chatterjee+ Christos Kozyrakis Matei Zaharia Keith Winstein Stanford University, +Unaffiliated Abstract build system ExCamera Google Test Scanner (make, ninja) (video encoder) (unit tests) (video analysis) We present gg, a framework and a set of command-line front-ends gg tools that helps people execute everyday applications—e.g., model substitution substitution scriptingscripting SDK SDK C++C++ SDK SDK Python SDKSDK software compilation, unit tests, video encoding, or object recognition—using thousands of parallel threads on a cloud- functions service to achieve near-interactive completion times. IR In the future, instead of running these tasks on a laptop, or gg back-ends keeping a warm cluster running in the cloud, users might gg push a button that spawns 10,000 parallel cloud functions to Lambda/S3 Lambda/RediscomputeOpenWhisk and storageGoogle Cloudengines Functions EC2 Local execute a large job in a few seconds from start. gg is designed to make this practical and easy. Lambda/S3 Lambda/Redis OpenWhisk Google Cloud Functions EC2 Local With gg, applications express a job as a composition of lightweight OS containers that are individually transient (life- Figure 1: gg helps applications express their jobs as a composition times of 1–60 seconds) and functional (each container is her- of interdependent Linux containers, and provides back-end engines metically sealed and deterministic). gg takes care of instantiat- to execute the job on different cloud-computing platforms. ing these containers on cloud functions, loading dependencies, minimizing data movement, moving data between containers, and dealing with failure and stragglers. -
Using Lame's Petrophysical Parameters for Fluid Detection and Lithology Determination in Parts of Niger Delta
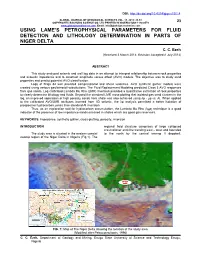
DOI: http://dx.doi.org/10.4314/gjgs.v13i1.4 GLOBAL JOURNAL OF GEOLOGICAL SCIENCES VOL. 13, 2015: 23-33 23 COPYRIGHT© BACHUDO SCIENCE CO. LTD PRINTED IN NIGERIA ISSN 1118-0579 www.globaljournalseries.com , Email: [email protected] USING LAME’S PETROPHYSICAL PARAMETERS FOR FLUID DETECTION AND LITHOLOGY DETERMINATION IN PARTS OF NIGER DELTA C. C. Ezeh (Received 3 March 2014; Revision Accepted 8 July 2014) ABSTRACT This study analyzed seismic and well log data in an attempt to interpret relationship between rock properties and acoustic impedance and to construct amplitude versus offset (AVO) models. The objective was to study sand properties and predict potential AVO classification. Logs of Briga 84 well provided compressional and shear velocities. AVO synthetic gather models were created using various gas/brine/oil substitutions. The Fluid Replacement Modeling predicted Class 3 AVO responses from gas sands. Log calibrated Lambda Mu Rho (LMR) inversion provided a quantitative extraction of rock properties to clearly determine lithology and fluids. Beyond the standard LMR cross-plotting that isolated gas sand clusters in the log, an improved separation of high porosity sands from shale was also achieved using λρ - µρ vs. AI. When applied to the calibrated AVO/LMR attributes inverted from 3D seismic, the λρ analysis permitted a better isolation of prospective hydrocarbon zones than standard AI inversion Thus, as an exploration tool for hydrocarbon accumulation, the Lambda Mu Rho (λµρ) technique is a good indicator of the presence of low impedance sands encased in shales which are good gas reservoirs. KEYWORDS: Impedance, synthetic gather, cross-plotting, porosity, inversion INTRODUCTION regional field structure comprises of large collapsed crest rollover anticline trending east – west and bounded The study area is situated in the eastern coastal to the north by the central swamp II depobelt. -

Introduction to WAN Macsec and Encryption Positioning
Introduction to WAN MACsec and Encryption Positioning Craig Hill – Distinguished SE (@netwrkr95) Stephen Orr – Distinguished SE (@StephenMOrr) BRKRST-2309 Cisco Spark Questions? Use Cisco Spark to chat with the speaker after the session How 1. Find this session in the Cisco Live Mobile App 2. Click “Join the Discussion” 3. Install Spark or go directly to the space 4. Enter messages/questions in the space Cisco Spark spaces will be cs.co/ciscolivebot#BRKRST-2309 available until July 3, 2017. © 2017 Cisco and/or its affiliates. All rights reserved. Cisco Public Session Presenters Craig Hill Stephen Orr Distinguished System Engineer Distinguished System Engineer US Public Sector US Public Sector CCIE #1628 CCIE #12126 BRKRST-2309 © 2017 Cisco and/or its affiliates. All rights reserved. Cisco Public 4 What we hope to Achieve in this session: • Understanding that data transfer requirements are exceeding what IPSec can deliver • Introduce you to new encryption options evolving that will offer alternative solutions to meet application demands • Enable you to understand what is available, when and how to position what solution • Understand the right tool in the tool bag to meet encryption requirements • Understand the pros/cons and key drivers for positioning an encryption solution • What key capabilities drive the selection of an encryption technology BRKRST-2309 © 2017 Cisco and/or its affiliates. All rights reserved. Cisco Public 5 Session Assumptions and Disclaimers • Intermediate understanding of Cisco Site-to-Site Encryption Technologies • DMVPN • GETVPN • FlexVPN • Intermediate understanding of Ethernet, VLANs, 802.1Q tagging • Intermediate understanding of WAN design, IP routing topologies, peering vs. overlay • Basic understanding of optical transport and impact of OSI model on various layers (L0 – L3) of network designs • Many 2 hour breakout sessions will focus strictly on areas this presentation touches on briefly (we will provide references to those sessions) BRKRST-2309 © 2017 Cisco and/or its affiliates. -

Lambda-Mu-Rho) Inversion: Case Study Barnett Shale, Fort Worth Basin Texas, USA
Bulletin of the Marine Geology, Vol. 28, No. 1, June 2013, pp. 43 to 50 Characteristic of Shale Gas Reservoir Using LMR (Lambda-Mu-Rho) Inversion: Case Study Barnett Shale, Fort Worth Basin Texas, USA Karakteristik “Shale Gas” Reservoir Menggunakan Inversi LMR (Lambda- Mu-Rho) : Studi Kasus Serpih Barnett, Cekungan Fort Worth, Texas, USA Hagayudha Timotius1*, Awali Priyono1 and Yulinar Firdaus2 1Geophysical Engineering, Bandung Institute of Technology 2Marine Geological Institute Email: *[email protected] (Received 21 January 2013; in revised form 1 May 2013; accepted 14 May 2013) ABSTRACT : The decreasing of fossil fuel reserves in the conventional reservoir has made geologists and geophysicists to explore alternative energy source that could answer energy needs in the future. Therefore the exploration of oil and gas that is still trapped in the source rock (shale) is needed, and one of them still developed in shale gas. The method of Amplitude Versus Offset (AVO) Inversion is used for Lambda-Mu-Rho attributes, that is expected to assess values of physical parameters of shale. Fort Worth Basin is chosen to be a study area because, the Barnett Shale Formation has proven contains of oil and gas. This study using synthetic seismic data, based on geological model and well log data obtained from Vermylen (2012). It is expected from the study of Barnett Shale that related to shale gas development could be applied. Keyword: Shale gas, Barnett Shale, Fort Worth Basin, AVO Inversion, Lambda-mu-rho attributes ABSTRAK : Penurunan cadangan bahan bakar fosil pada reservoar konvensional membuat ahli geologi dan geofisika mengeksplorasi sumber energi alternatif guna menjawab kebutuhan energi di masa depan. -

Sigma Lambda Upsilon/Señoritas Latinas Unidas Sorority, Inc
Sigma Lambda Upsilon/Señoritas Latinas Unidas Sorority, Inc. Alpha Eta Chapter Constitution Article I. Name This organization shall be known as Sigma Lambda Upsilon/Señoritas Latinas Unidas Sorority, Inc. (henceforth, the Sorority). Article II. Preamble We, the Hermanas of Sigma Lambda Upsilon/Señoritas Latinas Unidas Sorority, Inc. do ordain and establish this Sorority, with pride, as women, in order to preserve and perpetuate our beloved heritage. We have formed this impenetrable bond of sisterhood in concurrence with our values and beliefs. Under the common bond of sisterhood, we shall exhibit the courage and respect we have established for each other in love, caring and support for our ideals. Throughout the existence of Sigma Lambda Upsilon/Señoritas Latinas Unidas Sorority, Inc. we will aspire with dedication and pride, as women, to support those with similar dreams and goals, not limiting this focus to those members of our organization. Article III. Membership All Sorority members must abide by the membership criteria outlined in Article IV of the Sorority bylaws. Article IV. Executive Board The executive and administrative powers of the Sorority shall be vested in the Executive Board as outlined in Article V of the Sigma Lambda Upsilon/Señoritas Latinas Unidas Sorority, Inc. bylaws. The Executive Board shall consist of the President, Vice President, Secretary, Treasurer, Dean of Intake, Dean of Academics, Community Outreach Chair, and Public Relations Chair. Article V. Elections The Executive Board shall be elected to a one-year term at the end of the spring semester and abide by the criteria outlined in Article VII of the Sorority bylaws. -

By-Laws Alpha-Phi Zeta Lambda Chi Alpha Fraternity 2018
BY-LAWS ALPHA-PHI ZETA LAMBDA CHI ALPHA FRATERNITY 2018 REVISION ARTICLE I NAME This body shall officially known and designated as the Alpha-Phi Zeta of the Lambda Chi Alpha Fraternity. PO BOX 11069 601 Jefferson Avenue Tuscaloosa, AL 35401 ARTICLE II GOALS Section 2.1 Goals Enumerated The Goals of this Chapter shall be: 1. To maintain at the University of Alabama an undergraduate unit of Lambda Chi Alpha Fraternity in accordance with its ideals, standards, and laws set forth in its Ritual, Constitution and Statutory Code, Grand High Zeta edicts and the authorized rulings and orders of its general officers. 2. Particularly to build up the membership, ideals, spirit, organization, and physical equipment of this Zeta so that affiliation therewith shall be regarded as an honor and a privilege of which only the finest men are worthy. 3. To foster a spirit of genuine brotherhood among its members and associate members in good standing of other Zetas who visit it, to do all within its power to increase the friendly bond between the chapters, to develop as much as possible a universal consciousness of fraternalism in Lambda Chi Alpha Fraternity, to emphasize the fact that its badge and Ritual are sacred, that membership is for life and that its brotherhood is universal within its membership. ARTICLE III LAWS Section 3.1 Laws Enumerated This Chapter shall be governed by the following laws respectively: 1. Actions of the General Assembly 2. The Ritual of Lambda Chi Alpha Fraternity 3. Constitution and Statutory Code 4. Actions of the General Fraternity by Referendum 5. -

Lambda Chi Alpha Scholarship Application
Lambda Chi Alpha Scholarship Application All undergraduate scholarships are awarded through the Lambda Chi Alpha Educational Foundation. To be considered for a general scholarship, you must comply with the following: • Have at least a cumulative 3.0 G.P.A. on a 4.0 G.P.A. scale in your undergraduate course work. • Be an active, undergraduate Lambda Chi Alpha member in good standing. • Demonstrate Chapter and Campus Leadership and Involvement. • Demonstrate financial need. • Plan on attending school as a full-time undergraduate student during the 2017-2018 academic year. The application deadline is March 1, 2017. Judging is based on the following criteria: 1/3 Academic Achievement 1/3 Chapter and Campus Leadership and Involvement 1/3 Need APPLICATION INSTRUCTIONS 1. Complete one (1) copy of the “Undergraduate Scholarship Application” and submit it unstapled. 2. Complete two (2) copies of the “Recommendation Cover Page.” 3. Obtain two (2) letters of recommendation from the required individuals. 4. Obtain all necessary official university transcripts. 5. Mail all application material in one envelope to: Teresa Carlson, Director of Stewardship & Advancement Services Lambda Chi Alpha Educational Foundation 11711 N. Pennsylvania Street, Suite 250 Carmel, IN 46032 6. Application must be received (not postmarked) by March 1, 2017. If you have any questions regarding these scholarships, please contact Teresa Carlson at [email protected] or by phone (317) 803-7333. Lambda Chi Alpha Scholarship Application Judging is based on the following criteria: 1/3 Academic Achievement 1/3 Chapter and Campus Leadership and Involvement 1/3 Need INSTRUCTIONS Please forward the following information in one envelope: q Completed Scholarship Application q Official transcripts of all undergraduate coursework. -
Constitution of Sigma Lambda Gamma
N A T I O N A L C O NST I T U T I O N Updated:01/2011 Table of Contents Preamble ......................................................................................................................................... 4 Article I. Name ............................................................................................................................ 4 Article II. Purpose ..................................................................................................................... 4 Article III. Offices ...................................................................................................................... 4 Article IV. Organization of the Sorority .................................................................................... 4 Article V. Government.............................................................................................................. 5 Article VI. Membership ............................................................................................................. 5 Section 1. Certificate of Membership ........................................................................................ 5 Section 2. Issuance of Certificates ............................................................................................. 5 Article VII. Board of Directors ................................................................................................ 5 Section 1. Composition ............................................................................................................. -

Phi Lambda Sigma Alpha Mu Chapter Creighton University School of Pharmacy and Health Professions Omaha, Nebraska
Phi Lambda Sigma Alpha Mu Chapter Creighton University School of Pharmacy and Health Professions Omaha, Nebraska Updated October 2017 Mission Statement: The Alpha Mu Chapter of Phi Lambda Sigma is a leadership society dedicated to the encouragement, recognition, and promotion of leadership in the field of pharmacy. Through education, community service programs, and participation in pharmacy related activities, we hope to ensure the advancement of pharmacy in the Creighton community. Through the recognition of leadership among our peers, Phi Lambda Sigma fosters the ideals of a professional: dedication, caring behaviors, honesty, and selflessness. ALPHA MU CHAPTER OF PHI LAMBDA SIGMA SOCIETY BY-LAWS Article I Chapter Name Section 1. Beginning February 22, 1991, the organization of members duly initiated at Creighton University School of Pharmacy and Health Professions shall be named Alpha Mu Chapter in accordance with the constitution and by-laws of the Phi Lambda Sigma National Fraternity, incorporated at Auburn University School of Pharmacy in Lee County, Alabama on June 28, 1968. Section 2. The purpose of the Alpha Mu Chapter shall be the encouragement, recognition, and promotion of leadership in pharmacy. This should include, but is not limited to, pharmacy students, faculty, and alumni, as well as members of boards and all pharmacy associations. Special attention shall be given to the development of leadership qualities. Article II Eligibility for Membership Section 1. Collegiate Membership – the following shall be deemed eligible for election to active membership in the Society. a. Those students of pharmacy, men and women, who have demonstrated dedicated service and leadership in the advancement of pharmacy and are of high moral and ethical character. -

Dr. Brian Russell
Making sense of all that AVO and inversion stuff! The Milton Dobrin Lecture April, 2010 Brian Russell Hampson-Russell, A CGGVeritas Company Milton B. Dobrin Born: April 7, 1915, in Vancouver A gifted teacher, best known for his influential book on geophysical exploration: editions 1 and 2 written in Calgary, edition 3 written in Houston, where he was a Professor at U of H. Died: May 22, 1980, in Houston. Introduction . The Amplitude Variations with Offset (AVO) technique has grown to include a multitude of sub-techniques, each with its own assumptions. AVO techniques can be subdivided as either: . (1) seismic reflectivity or (2) impedance methods. Seismic reflectivity methods include: Near and Far stacks, Intercept vs Gradient analysis and the fluid factor. Impedance methods include: P and S-impedance inversion, Lambda-mu-rho, Elastic Impedance and Poisson Impedance. The objective of this talk is to make sense of all of these methods and show how they are related. Let us start by looking at the different ways in which a geologist and geophysicist look at data. From Geology to Geophysics Well Log Reflectivity Layer i Pi Ri Layer i+1 Pi+1 For a layered earth, a well log measures a parameter P for each layer and the seismic trace measures the interface reflectivity R. The reflectivity Well Log Reflectivity The reflectivity at each interface is found by dividing the change in the value of the parameter by twice its Pi average. Ri Pi+1 As an equation, this is written: Pi 1 Pi Pi Ri = , Pi 1 Pi 2Pi where : P P P P P and P i 1 i i i 1 i i 2 The convolutional model Wavelet Parameter Reflectivity Seismic One extra thing to observe is that the seismic trace is the convolution of the reflectivity with a wavelet (S = W*R). -

Big Brother Manual
Big Brother Guide a Lambda Chi Alpha resource ΛΧΑ “Every journey begins with a single step…” Your decision to become a Big Brother begins for you a remarkable journey which you will share with your Little Brother. As you guide, teach, mentor and support your Little Brother in his pathway towards the Inner Circle, you will undoubtedly remember and re-experience aspects of your own journey and development towards True Brotherhood. In fact, being a Big Brother can be an important part of your own True Brother experience. The more you share your journey with your Little Brother and the more you participate in his experience, the richer and more meaningful it will be for both of you. You are about to forge a very special, lifelong relationship. Remember that your example as a committed brother of character, who attempts to live the teachings of our ritual, will be the most important guide for your Little Brother and the most significant gift that you can give him. Lambda Chi Alpha Big Brother Guide Table of Contents Role and Responsibilities..............................................................................................................................1 Responsibilities You Are Expected to Fulfill:..........................................................................................1 Be a Role Model...................................................................................................................................1 Be a Friend ...........................................................................................................................................2