Materials (Principles, Demagnetization Curves And
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Ferrite / Ceramic Data Sheet
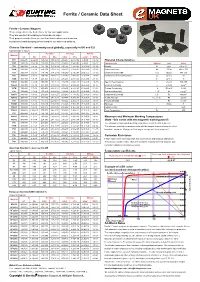
Ferrite / Ceramic Data Sheet Ferrite / Ceramic Magnets These magnets are the best choice for low cost applications. They are excellent at resisting corrosion due to water. Their properties make them an excellent choice when used in motors, loudspeakers and clamping devices and for use with reed switches. Chinese Standard - commonly used globally, especially in UK and EU Typical Range of Values Br Hc (Hcb) Hci (Hcj) BHmax Material mT kG kA/m kOe kA/m kOe kJ/m3 MGOe Y8T 200-235 2.0-2.35 125-160 1.57-2.01 210-280 2.64-3.52 6.5-9.5 0.8-1.2 Physical Characteristics Y10T 200-235 2.0-2.35 128-160 1.61-2.01 210-280 2.64-3.52 6.4-9.6 0.8-1.2 Characteristic Symbol Unit Value Y20 320-380 3.2-3.8 135-190 1.70-2.39 140-195 1.76-2.45 18.0-22.0 2.3-2.8 Density D g/cc 4.9 to 5.1 Y22H 310-360 3.1-3.6 220-250 2.76-3.14 280-320 3.52-4.02 20.0-24.0 2.5-3.0 Vickers Hardness Hv D.P.N 400 to 700 Y23 320-370 3.2-3.7 170-190 2.14-2.39 190-230 2.39-2.89 20.0-25.5 2.5-3.2 Compression Strength C.S N/mm2 680-720 Y25 360-400 3.6-4.0 135-170 1.70-2.14 140-200 1.76-2.51 22.5-28.0 2.8-3.5 Coefficient of Thermal Expansion C// 10-6/C 15 Y26H 360-390 3.6-3.9 220-250 2.76-3.14 225-255 2.83-3.20 23.0-28.0 2.9-3.5 C^ 10-6/C 10 Y26H-1 360-390 3.6-3.9 200-250 2.51-3.14 225-255 2.83-3.20 23.0-28.0 2.9-3.5 Specific Heat Capacity c J/kg°C 795-855 Y26H-2 360-380 3.6-3.8 263-288 3.30-3.62 318-350 4.00-4.40 24.0-28.0 3.0-3.5 Electrical Resistivity r m Ω.cm 1x1010 Y27H 370-400 3.7-4.0 205-250 2.58-3.14 210-255 2.64-3.20 25.0-29.0 3.1-3.6 Thermal Conductivity k W/cm°C 0.029 Y28 370-400 3.7-4.0 175-210 2.20-2.64 180-220 2.26-2.76 26.0-30.0 3.3-3.8 Modulus of Elasticity l / E Pa 1.8x1011 Y28H-1 380-400 3.8-4.0 240-260 3.02-3.27 250-280 3.14-3.52 27.0-30.0 3.4-3.8 Compression Strength C.S. -

A TWO DIMENSIONAL FERRITE-CORE MEMORY Bv M
A TWO DIMENSIONAL FERRITE-CORE MEMORY Bv M. M. FAROOQUI, S. P. SKiVASTAVA AND R. N. NEOGI (Tata Institute of Fundamental Research, Bomba),) Received January t0, 1957 (Communicated by Prof. Bernard P ABS'IXACT This paper describes a two dimensional matrix memory using ferrite- cores. A urtit consisting of 100 words of I 1 binary digits each has been cortstructed for parallel operation. The word drive is from a biasr switch-core matrix, while the digit drive makes use of pulse--trans- formers. Logic and circuit techniques enable high discrimination bet- ween wanted and unwanted signals. A semi-automatic method for testing the memory cores is also described. INTRODUCTION THE potentiality of magnetie fer¡ with a rectangular hysteresis loop as binary storage elements for digital computer was realised earlier by Forrester. x Later, Papian% s and almost simultaneously Rajchman4, ~ showed the practicability of such a system by successfully operating memories of fairly large capacity. This paper describes a modest attempt in this direction. A memory of I00 words, 11 bits each, has beca constructed to operate with a smaU digital computer at the Tata institute of Fundamental Research, Bombay. THE PRINClPLE OF OPERATION OF THE MEMORY The two stable states required for sto¡ binary information in magnetic cores ate the states of positive and negative magnetisation. These are the states corresponding to the position A0 and Ax on the hysteresis loop and can be termed as the 0- and the 1-states respectively (Fig. 2). Con- sider a number of sucia cores with ah ideaUy rectangular hysteresis character- istic, arranged in rows and columns in the form of a matrix. -

Permanent Magnet DC Motors Catalog
Catalog DC05EN Permanent Magnet DC Motors Drives DirectPower Series DA-Series DirectPower Plus Series SC-Series PRO Series www.electrocraft.com www.electrocraft.com For over 60 years, ElectroCraft has been helping engineers translate innovative ideas into reality – one reliable motor at a time. As a global specialist in custom motor and motion technology, we provide the engineering capabilities and worldwide resources you need to succeed. This guide has been developed as a quick reference tool for ElectroCraft products. It is not intended to replace technical documentation or proper use of standards and codes in installation of product. Because of the variety of uses for the products described in this publication, those responsible for the application and use of this product must satisfy themselves that all necessary steps have been taken to ensure that each application and use meets all performance and safety requirements, including all applicable laws, regulations, codes and standards. Reproduction of the contents of this copyrighted publication, in whole or in part without written permission of ElectroCraft is prohibited. Designed by stilbruch · www.stilbruch.me ElectroCraft DirectPower™, DirectPower™ Plus, DA-Series, SC-Series & PRO Series Drives 2 Table of Contents Typical Applications . 3 Which PMDC Motor . 5 PMDC Drive Product Matrix . .6 DirectPower Series . 7 DP20 . 7 DP25 . 9 DP DP30 . 11 DirectPower Plus Series . 13 DPP240 . 13 DPP640 . 15 DPP DPP680 . 17 DPP700 . 19 DPP720 . 21 DA-Series. 23 DA43 . 23 DA DA47 . 25 SC-Series . .27 SCA-L . .27 SCA-S . .29 SC SCA-SS . 31 PRO Series . 33 PRO-A04V36 . 35 PRO-A08V48 . 37 PRO PRO-A10V80 . -

Magnetics in Switched-Mode Power Supplies Agenda
Magnetics in Switched-Mode Power Supplies Agenda • Block Diagram of a Typical AC-DC Power Supply • Key Magnetic Elements in a Power Supply • Review of Magnetic Concepts • Magnetic Materials • Inductors and Transformers 2 Block Diagram of an AC-DC Power Supply Input AC Rectifier PFC Input Filter Power Trans- Output DC Outputs Stage former Circuits (to loads) 3 Functional Block Diagram Input Filter Rectifier PFC L + Bus G PFC Control + Bus N Return Power StageXfmr Output Circuits + 12 V, 3 A - + Bus + 5 V, 10 A - PWM Control + 3.3 V, 5 A + Bus Return - Mag Amp Reset 4 Transformer Xfmr CR2 L3a + C5 12 V, 3 A CR3 - CR4 L3b + Bus + C6 5 V, 10 A CR5 Q2 - + Bus Return • In forward converters, as in most topologies, the transformer simply transmits energy from primary to secondary, with no intent of energy storage. • Core area must support the flux, and window area must accommodate the current. => Area product. 4 3 ⎛ PO ⎞ 4 AP = Aw Ae = ⎜ ⎟ cm ⎝ K ⋅ΔB ⋅ f ⎠ 5 Output Circuits • Popular configuration for these CR2 L3a voltages---two secondaries, with + From 12 V 12 V, 3 A a lower voltage output derived secondary CR3 C5 - from the 5 V output using a mag CR4 L3b + amp postregulator. From 5 V 5 V, 10 A secondary CR5 C6 - CR6 L4 SR1 + 3.3 V, 5 A CR8 CR7 C7 - Mag Amp Reset • Feedback to primary PWM is usually from the 5 V output, leaving the +12 V output quasi-regulated. 6 Transformer (cont’d) • Note the polarity dots. Xfmr CR2 L3a – Outputs conduct while Q2 is on. -

Equivalence of Current–Carrying Coils and Magnets; Magnetic Dipoles; - Law of Attraction and Repulsion, Definition of the Ampere
GEOPHYSICS (08/430/0012) THE EARTH'S MAGNETIC FIELD OUTLINE Magnetism Magnetic forces: - equivalence of current–carrying coils and magnets; magnetic dipoles; - law of attraction and repulsion, definition of the ampere. Magnetic fields: - magnetic fields from electrical currents and magnets; magnetic induction B and lines of magnetic induction. The geomagnetic field The magnetic elements: (N, E, V) vector components; declination (azimuth) and inclination (dip). The external field: diurnal variations, ionospheric currents, magnetic storms, sunspot activity. The internal field: the dipole and non–dipole fields, secular variations, the geocentric axial dipole hypothesis, geomagnetic reversals, seabed magnetic anomalies, The dynamo model Reasons against an origin in the crust or mantle and reasons suggesting an origin in the fluid outer core. Magnetohydrodynamic dynamo models: motion and eddy currents in the fluid core, mechanical analogues. Background reading: Fowler §3.1 & 7.9.2, Lowrie §5.2 & 5.4 GEOPHYSICS (08/430/0012) MAGNETIC FORCES Magnetic forces are forces associated with the motion of electric charges, either as electric currents in conductors or, in the case of magnetic materials, as the orbital and spin motions of electrons in atoms. Although the concept of a magnetic pole is sometimes useful, it is diácult to relate precisely to observation; for example, all attempts to find a magnetic monopole have failed, and the model of permanent magnets as magnetic dipoles with north and south poles is not particularly accurate. Consequently moving charges are normally regarded as fundamental in magnetism. Basic observations 1. Permanent magnets A magnet attracts iron and steel, the attraction being most marked close to its ends. -
Permanent Magnet Design Guidelines
NOTE(2019): THIS ORGANIZATION (MMPA) IS OBSOLETE! MAGNET GUIDELINES Basic physics of magnet materials II. Design relationships, figures merit and optimizing techniques Ill. Measuring IV. Magnetizing Stabilizing and handling VI. Specifications, standards and communications VII. Bibliography INTRODUCTION This guide is a supplement to our MMPA Standard No. 0100. It relates the information in the Standard to permanent magnet circuit problems. The guide is a bridge between unit property data and a permanent magnet component having a specific size and geometry in order to establish a magnetic field in a given magnetic circuit environment. The MMPA 0100 defines magnetic, thermal, physical and mechanical properties. The properties given are descriptive in nature and not intended as a basis of acceptance or rejection. Magnetic measure- ments are difficult to make and less accurate than corresponding electrical mea- surements. A considerable amount of detailed information must be exchanged between producer and user if magnetic quantities are to be compared at two locations. MMPA member companies feel that this publication will be helpful in allowing both user and producer to arrive at a realistic and meaningful specifica- tion framework. Acknowledgment The Magnetic Materials Producers Association acknowledges the out- standing contribution of Parker to this and designers and manufacturers of products usingpermanent magnet materials. Parker the Technical Consultant to MMPA compiled and wrote this document. We also wish to thank the Standards and Engineering Com- mittee of MMPA which reviewed and edited this document. December 1987 3M July 1988 5M August 1996 December 1998 1 M CONTENTS The guide is divided into the following sections: Glossary of terms and conversion A very important starting point since the whole basis of communication in the magnetic material industry involves measurement of defined unit properties. -

Ferrite and Metal Composite Inductors
Ferrite and Metal Composite Inductors Design and Characteristics © 2019 KEMET Corporation What is an Inductor? Coil Magnetic Magnetic flux φ (Wire) Field dφ Core e = - dt Material i The coil converts electric energy into magnetic energy and stores it. e Core Material Current through the coil of wire creates a magnetic field Air Ferrite Metal and stores it. (None) (Iron) Composite Different core materials change magnetic field strength. © 2019 KEMET Corporation Ferrite Inductor or Metal Composite Inductor? Ferrite InductorFerrite Metal InductorMetal Composite MaterialMaterial Type type Ni-ZnNi-Zn Mn-Zn Mn-Zn Fe based Fe Based Very Good!! No Good.. InductanceInductace GoodGood! Very Good No Good Very Good!! Magnetic Saturation Good! No Good.. Good! No Good.. Very Good!! MagneticThermal Saturation Property Good No Good Very Good Good! Very Good!! Good! Efficiency Very Good!! No Good.. Good! ThermalResistance Property of core Good No Good Very Good Efficiency SBC/SBCPGood TPI Very GoodMPC, MPCV Good Products MPLC, MPLCV Resistance of Core Very Good No Good Good © 2019 KEMET Corporation Ferrite and Metal Composite Comparison Advantage of Ferrite 1. Higher inductance with high permeability 2. Stable inductance in the right range High L and Low DCR capability Advantage of Metal Composite 1. Very slow saturation 2. Very stable saturation for the thermal Core Loss Comparison Good for Auto app especially Advantage of Ferrite Very low core loss in dynamic frequency range Mn-Zn Ferrite Metal Core Low power consumption capability © 2019 KEMET Corporation -
Switch Mode Power Supplies and Their Magnetics Tutorial
Datatronic Switch Mode Power Supplies and their Magnetics Many factors must be considered by designers when choosing the magnetic components required in today’s electronic power supplies DATATRONIC DISTRIBUTION, INC. Datatronic In today’s day and age the most often used topology for electronic power supplies is that of the Switch Mode Power Supply (SMPS), which is a major user of magnetics. In some applications the “older type” linear supplies are still used, but in the early 70’s SMPS came into being spurred by the development of faster switching transistors. This facilitated the use of much smaller magnetic components and greater efficiencies. DATATRONIC DISTRIBUTION, INC. Datatronic SMPS and their General Magnetic Usage In general, there are four different types of magnetic components that are needed for the typical SMPS. They include the Output Transformer, usually the most noticeable because of its size compared to the others, the Output Inductors, the Input Inductors and the Current Sense Transformer, each with its own important function. DATATRONIC DISTRIBUTION, INC. Datatronic SMPS and their General Magnetic Usage 1.The Output Transformer or “Main” Transformer takes the input voltage that is supplied to its primary winding and then transforms the input voltage to one or more voltages that are the output of the secondary winding or windings. 2. The Output Inductors are used to filter the output voltage so that the load “sees” a filtered DC voltage. DATATRONIC DISTRIBUTION, INC. Datatronic SMPS and their General Magnetic Usage 3. The Input Inductors filter out the noise generated by the switching transistors so that this noise isn’t emitted back to the source. -

An Inexpensive Hands-On Introduction to Permanent Magnet Direct Current Motors
AC 2011-1082: AN INEXPENSIVE HANDS-ON INTRODUCTION TO PER- MANENT MAGNET DIRECT CURRENT MOTORS Garrett M. Clayton, Villanova University Dr. Garrett M. Clayton received his BSME from Seattle University and his MSME and PhD in Mechanical Engineering from the University of Washington (Seattle). He is an Assistant Professor in Mechanical Engineering at Villanova University. His research interests focus on mechatronics, specifically modeling and control of scanning probe microscopes and unmanned vehicles. Rebecca A Stein, University of Pennsylvania Rebecca Stein is the Associate Director of Research and Educational Outreach in the School of Engi- neering and Applied Science at the University of Pennsylvania. She received her B.S. in Mechanical Engineering and Masters in Technology Management from Villanova University. Her background and work experience is in K-12 engineering education initiatives. Rebecca has spent the past 5 years involved in STEM high school programs at Villanova University and The School District of Philadelphia. Ad- ditionally, she has helped coordinate numerous robotics competitions such as BEST Robotics, FIRST LEGO League and MATE. Page 22.177.1 Page c American Society for Engineering Education, 2011 An Inexpensive Hands-on Introduction to Permanent Magnet Direct Current Motors Abstract Motors are an important curricular component in freshman and sophomore introduction to mechanical engineering (ME) courses as well as in curricula developed for high school science and robotics clubs. In order to facilitate a hands-on introduction to motors, an inexpensive permanent magnet direct current (PMDC) motor experiment has been developed that gives students an opportunity to build a PMDC motor from common office supplies along with a few inexpensive laboratory components. -

Magnetic Materials: Hysteresis
Magnetic Materials: Hysteresis Ferromagnetic and ferrimagnetic materials have non-linear initial magnetisation curves (i.e. the dotted lines in figure 7), as the changing magnetisation with applied field is due to a change in the magnetic domain structure. These materials also show hysteresis and the magnetisation does not return to zero after the application of a magnetic field. Figure 7 shows a typical hysteresis loop; the two loops represent the same data, however, the blue loop is the polarisation (J = µoM = B-µoH) and the red loop is the induction, both plotted against the applied field. Figure 7: A typical hysteresis loop for a ferro- or ferri- magnetic material. Illustrated in the first quadrant of the loop is the initial magnetisation curve (dotted line), which shows the increase in polarisation (and induction) on the application of a field to an unmagnetised sample. In the first quadrant the polarisation and applied field are both positive, i.e. they are in the same direction. The polarisation increases initially by the growth of favourably oriented domains, which will be magnetised in the easy direction of the crystal. When the polarisation can increase no further by the growth of domains, the direction of magnetisation of the domains then rotates away from the easy axis to align with the field. When all of the domains have fully aligned with the applied field saturation is reached and the polarisation can increase no further. If the field is removed the polarisation returns along the solid red line to the y-axis (i.e. H=0), and the domains will return to their easy direction of magnetisation, resulting in a decrease in polarisation. -

INTRODUCTION:- Ferrites Are Ferromagnetic Material Containing Predominantly Oxides Iron Along with Other Oxides of Barium, Stron
INTRODUCTION:- Ferrites are ferromagnetic material containing predominantly oxides iron along with other oxides of barium, strontium, manganese, nickel, zinc, lithium and cadmium .Ferrites are ideally suited for making device like inductor core, circulators, memory devices and also for various microwave application. Although the saturation magnetisation of ferrites less than that of ferromagnetic alloys, they have advantages such as applicability at higher frequency, lower price and greater electrical resistance. Since 1950, soft ferrites have been widely studied and have become a field of interest of many researches because of their application potential in the modern electronics industry. The electrical and magnetic properties of these materials are structure sensitive and can be altered by doping or substitution. The substitution of aluminium in the inverse ferrites like Nickel, copper and cobalt ferrites have proved to be useful by increasing their saturation, magnetization, resistivity, however, at the cost of decrease of Curie temperature. Cadmium ferrite is a normal spinel ; its magnetic moment per unit cell is zero. Low magnetic high resistive ferrite are so applicable in the high frequency transformer cores. The addition of aluminium which has strong preference for the octahedral sites should exhibit the decrease of the magnetisation because aluminium is nonmagnetic. As aluminium content increases, the magnetic moment of unit cell decreases that means show triangular spin moment, their occurs a reduction in the sub lattice interaction. The removal of iron ions from magnetic sublattice and substitution of the nonmagnetic aluminium ion in its place weakens the magnetism. Due to this substitution improves catalytic, dielectric and magnetic properties, as they possess high resistivity and negligible eddy current losses. -

Part 3 LCLS-II Cryomodule Magnet Package
Part 3 Linear Accelerator Magnets Vladimir Kashikhin January 15, 2020 LCLS-II Cryomodule Magnet Package Outline – Introduction – Magnet Package physics requirements – Engineering Specifications – Magnet integration – Prototype magnet testing – Magnets fabrication – Production magnet tests – Full power test in the Cryomodule – Summary 3 USPAS Linear Accelerator Magnets V. Kashikhin, Part 3, January 15, 2020 Introduction • The magnet package design is based on the physics requirement documents: LCLSII-4.1-PR-0146-R0, and LCLSII-4.1-PR-0081-R0. • The design is based on the Splittable Conduction Cooled magnet configuration proposed by Akira Yamamoto for ILC magnets. • ILC magnet prototype was built and successfully tested in the conduction cooling mode using just 1 W cooling capacity cryocooler. • The LCLS-II magnet is half the weight while requiring less than half the current as compared to the XFEL magnet. • The main advantages of this magnet relatively XFEL: ✓ Cleanroom installation not required. ✓ No LHe vessel for the magnet and current leads. ✓ More accurate magnet alignment in the space. ✓ Lower superconductor magnetization effects from dipole coils. ✓ Simple, low cost current leads. 4 USPAS Linear Accelerator Magnets V. Kashikhin, Part 3, January 15, 2020 Magnet Package Physics Requirements • The Magnet Package contains a quadrupole and two built-in dipole correctors. • The quadrupole integrated gradient is 0.064 T – 2.0 T. Integrated field quadrupole harmonics at 10 mm radius are: b2/b1< 0.01, b5/b1<0.01. The dipole integrated field is 0.005 T-m. • The electron beam energy linearly increases along the L1B, L2B, and L3B SCRF sections of the Linac with the corresponding beam size decrease: 250, 150, 80 µm.