Nalanda Open University Course Name: BCA Part II Paper-X (Computer Networking) Coordinator: A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Presentation on Digital Communication (ECE) III- B.TECH V- Semester (AUTONOMOUS-R16) Prepared By, Dr. S.Vinoth Mr. G.Kiran
Presentation on Digital communication (ECE) III- B.TECH V- Semester (AUTONOMOUS-R16) Prepared by, Dr. S.Vinoth Mr. G.Kiran Kumar (Associate Professor) (Assistant Professor) UNIT -I Pulse Digital Modulation 2 COMMUNICATION •The transmission of information from source to the destination through a channel or medium is called communication. •Basic block diagram of a communication system: 3 COMMUNICATION cont.. • Source: analog or digital • Transmitter: transducer, amplifier, modulator, oscillator, power amp., antenna • Channel: e.g. cable, optical fiber, free space • Receiver: antenna, amplifier, demodulator, oscillator, power amplifier, transducer • Destination : e.g. person, (loud) speaker, computer 4 Necessity of Digital communication • Good processing techniques are available for digital signals, such as medium. • Data compression (or source coding) • Error Correction (or channel coding)(A/D conversion) • Equalization • Security • Easy to mix signals and data using digital techniques 5 Necessity of Digitalization •In Analog communication, long distance communication suffers from many losses such as distortion, interference & security. •To overcome these problems, signals are digitalized. Information is transferred in the form of signal. 6 PULSE MODULATION In Pulse modulation, a periodic sequence of rectangular pulses, is used as a carrier wave. It is divided into analog and digital modulation. 7 Analog Pulse Modulation In Analog modulation , If the amplitude, duration or position of a pulse is varied in accordance with the instantaneous values of the baseband modulating signal, then such a technique is called as • Pulse Amplitude Modulation (PAM) or • Pulse Duration/Width Modulation (PDM/PWM), or • Pulse Position Modulation (PPM). 8 Digital modulation •In Digital Modulation, the modulation technique used is Pulse Code Modulation (PCM) where the analog signal is converted into digital form of 1s and 0s. -

2.1 Fundamentals of Data and Signals the Major Function of the Physical
2.1 Fundamentals of Data and Signals The major function of the physical layer is to move data in the form of electromagnetic signals across a transmission medium. Whether the data may be numerical statistics from another computer, sending animated pictures from a design workstation, or causing a bell to ring at a distant control center, you are working with the transmission of data across network connections. Analog and Digital Data Data can be analog or digital. The term analog data refers to information that is continuous, Digital data refers to information that has discrete states. For example, an analog clock that has hour, minute, and second hands gives information in a continuous form, the movements of the hands are continuous. On the other hand, a digital clock that reports the hours and the minutes will change suddenly from 8:05 to 8:06. Analog and Digital Signals: An analog signal has infinitely many levels of intensity over a period of time. As the wave moves from value A to value B, it passes through and includes an infinite number of values along its path. A digital signal, on the other hand, can have only a limited number of defined values. Although each value can be any number, it is often as simple as 1 and 0. The following program illustrates an analog signal and a digital signal. The curve representing the analog signal passes through an infinite number of points. The vertical lines of the digital signal, however, demonstrate the sudden jump that the signal makes from value to value. -
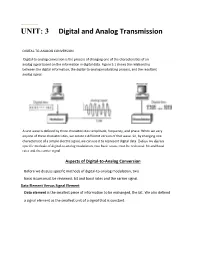
UNIT: 3 Digital and Analog Transmission
UNIT: 3 Digital and Analog Transmission DIGITAL-TO-ANALOG CONVERSION Digital-to-analog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data. Figure 5.1 shows the relationship between the digital information, the digital-to-analog modulating process, and the resultant analog signal. A sine wave is defined by three characteristics: amplitude, frequency, and phase. When we vary anyone of these characteristics, we create a different version of that wave. So, by changing one characteristic of a simple electric signal, we can use it to represent digital data. Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Aspects of Digital-to-Analog Conversion Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Data Element Versus Signal Element Data element is the smallest piece of information to be exchanged, the bit. We also defined a signal element as the smallest unit of a signal that is constant. Data Rate Versus Signal Rate We can define the data rate (bit rate) and the signal rate (baud rate). The relationship between them is S= N/r baud where N is the data rate (bps) and r is the number of data elements carried in one signal element. The value of r in analog transmission is r =log2 L, where L is the type of signal element, not the level. Carrier Signal In analog transmission, the sending device produces a high-frequency signal that acts as a base for the information signal. -

Design of Return to Zero (RZ) Bipolar Digital to Digital Encoding Data Transmission
IOSR Journal of Engineering (IOSRJEN) www.iosrjen.org ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 05, Issue 02 (February. 2015), ||V4|| PP 33-36 Design of Return to Zero (RZ) Bipolar Digital to Digital Encoding Data Transmission Amna mohammed Elzain1,Abdelrasoul Jabar Alzubaidi2 Alazhery University- Engineering college Sudan University of Science and technology –Engineering College- Electronics Engineering School Abstract: - Line encoding is the method used to represent the digital information on the media. A pattern, that uses either voltage or current, is used to represent the 1s and 0s of the digital signal on the transmission link. Common types of line encoding methods used in data communications are: Unipolar line encoding, Polar line encoding, Bipolar line encoding and Manchester line encoding. This paper deals with the design of bipolar digital to digital encoding (RZ) data transmission using latch SN 74373, darlington amplifier ULN 2003-500 m A, solid state relay, personnel computer and Turbo C++ programming language ). Keywords: - Bipolar, Encoding, Digital to Digital, Latch SN 74373, Darlington Amplifier ULN 2003-500 m A, Solid State Relay (SSR) ,Turbo C++ , Computer. I. INTRODUCTION A computer network is used for communication of data from one station to another station in the network [1]. Data and signals are two of the basic building blocks of any computer network. Data must be encoded into signals before it can be transported across communication media [2]. Encoding means conversion of data into bit stream [3]. There are different encoding schemes available: Analog-to-Digital Digital-to-Analog Analog-to-Analog Digital-to-Digital Digital-to-Digital Digital-to-Digital encoding is the representation of digital information by a digital signal . -

Optical Modulation for High Bit Rate Transport Technologies by Ildefonso M
Technology Note Optical Modulation for High Bit Rate Transport Technologies By Ildefonso M. Polo I October, 2009 Scope There are plenty of highly technical and extremely mathematical articles published about optical modulation formats, showing complex formulas, spectral diagrams and almost unreadable eye diagrams, which can be considered normal for every emerging technology. The main purpose of this article is to demystify optical modulation in a way that the rest of us can visualize and understand them. Nevertheless, some of these modulations are so complex that they can’t be properly represented in a simple time domain graph, so polar (constellation) or spherical coordinates are often used to represent the different states of the signal. Within this document some of these polar diagrams have been enhanced with the state diagram (blue) to indicate the possible transitions and logic. Introduction Back in the early ‘90s, copper lines moved from digital baseband line coding (e.g. 2B1Q, 4B3T, AMI, and HDB3, among others) to complex modulation schemes to increase speed, reach, and reliability. We were all skeptical that a technology like DSL would have been able to transmit 256 simultaneous QAM16 signals and achieve 8 Mbit/s. Today copper is already reaching the 155 Mbit/s mark. This is certainly a full circle. We moved from analog to digital transmission to increase data rates and reliability, and then we resorted to analog signals (through modulation) to carry digital information farther, faster and more reliably. Back then, 155 Mbit/s were only thought of for fiber optics transmission. It is also interesting to note that only a few years ago we seemed to be under the impression that ‘fiber optics offered an almost infinite amount of bandwidth’ or more than we would ever need. -

NRZ Coding RZ Coding
Analog and Digital Transmission • Data transmission through a LAN can be either Chapter 3 digital or analog. • Digital transmission includes the processes of line coding (converting binary data to digital Data signals) and sampling (converting analog data to digital signals). Transmission • AlAnalog transmiiission ildincludes modldulat ion of digital and analog signals. 1 2 Digital Signals Digital Signals • A digital signal can only have a limited number • The bit interval is the time required to send of values; it is discrete. The transition from one single bit. one value to another is instantaneous. • The bit rate is the number of bits sent in one second, usually expressed in bps. Figure 3.1 A Digital Signal • They are reciliprocal of each other BitRate = 1 / (BitInterval) BitInterval = 1 / (BitRate) 3 4 Figure 3-2 Bit Rate and Bit Interval Analog Signals • An analog signal can have an infinite number of values; it is continuous. The transition from one value to another is smooth. Figure 3 .3 An Analog Signal 5 6 Analog Signals Analog Signals • A periodic signal has a repeated pattern. • Sine waves can be described by 3 parameters: – e.g. the sine wave – Amplitude: vertical distance between a point on • An aperiodic signal has no repeating pattern. the wave and the horizontal axis – Period or frequency: time needed to complete a Figure 3 .4 A Sine Wave cycle or the number of periods in one second; they are inverse of each other – Phase: the position of the waveform relative to the time zero 7 8 Figure 3-5 Figure 3-6 Amplitude Period and Frequency 9 10 Figure 3-7 Relationship between Different Phases Time and Frequency Domains • In real applications, the signals are usually composite signals made of many sine waves with different ampp,litudes, freqq,uencies, and phases. -

Similarity Oriented Logic Simplification Between Unipolar Return to Zero and Manchester Codes
ISSN:2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE) Volume 5, Issue 7, July 2016 SIMILARITY ORIENTED LOGIC SIMPLIFICATION BETWEEN UNIPOLAR RETURN TO ZERO AND MANCHESTER CODES 1Remy K.O, PG Scholar inVLSI Design, 2Manju V.M Assistant Professor,ECE Department, 3Sindhu T.V Assistant Professor,ECE Department, IES college of Engineering, Thrissur, Kerala Abstract: The line codes are used for variety of applications. this encoding approach, the bit rate same as data rate. Polar The code diversity between Unipolar and Manchester code encoding technique uses two voltage levels ,one positive and seriously limits the potential to design a fully reused VLSI the other one negative. In Bipolar encoding techniques zero architecture.The combined architecture of both Manchester level is used to transmit the binary 0 and binary 1 is and unipolar RZ codes can be used for optical fiber represented by alternative positive and negative voltages[3]. communication and dedicated short range communications. In There are two formats are used to transmit the this paper, similarity oriented logic simplification is used to Unipolar or polar data, they are non return to zero and return exploits the characteristics of two codes and design a fully to zero formats. Non return to zero format, is the most reused VLSI architecture .This results can be used in various common and easiest way to transmit digital signals and it use applications. The result shows that sols technique improves two different voltage levels for the two binary digits. Usually a the hardware utilization ratio.SOLS improves hardware negative voltage is used to represent one binary value and a utilization ratio from 55% to 57%. -

Answers to Multiple Choices from the Web Page Chapter 1 Answers
Answers to Multiple Choices from the Web Page Chapter 1 Answers 1. The _______ is the physical path by which a message travels from sender to receiver. ans: c. transmission medium 2. Twisted-pair wire, coaxial cable, and fiber-optic cable are all types of _______. ans: c. media 3. A _______ is a set of rules governing data communication between two devices. ans: a. protocol 4. A _______ is a set of devices (nodes) connected by media links. ans: c. network 5. The _______ is the information (data) to be communicated. ans: b. message 6. The message can consist of _______. ans: d. any of the above 7. The _______ is the device that sends the message. ans: c. sender 8. The source can be a _______. ans: d. any of the above 9. The receiver can be a _______. ans: d. any of the above 10. Transit time and response time measure the _______ of a network. ans: a. performance 11. The number of users on a network has the greatest impact on the network's _______. ans: a. performance 12. Network failure is primarily a _______ issue. ans: b. reliability 13. _______ is a network reliability issue. ans: c. The frequency of failure 14. The time it takes for a network to recover after a failure is a network _______ issue. ans: b. reliability 15. _______ is a network reliability issue. ans: a. Catastrophe 16. Unauthorized access is a network _______ issue. ans: c. security 17. A virus is a network _______ issue. ans: c. security 18. -

Digital Data Digital Signal
Digital Data Digital Signal Digital signals are transmitted using LINE CODING technique Q: What is Line Coding? In telecommunication, a line code (also called digital baseband modulation, also called digital baseband transmission method) is a code chosen for use within a communications system for baseband transmission purposes. Line coding is often used for digital data transport. Q: What are the requirements of a Good Line Encoding Schemes A Desirable Properties for Line Codes are 1. Transmission Bandwidth: as small as possible 2. Power Efficiency: As small as possible for given BW and 3. probability of error 4. Error Detection and Correction capability: Ex: Bipolar 5. Favorable power spectral density: dc=0 6. Adequate timing content: Extract timing from pulses 7. Avoid Long strings of same pulse We can divide line coding schemes into three broad categories 1. Unipolar 2. Polar 3. Bipolar Ahmad Bilal swedishchap.weebly.com 1. Unipolar Unipolar encoding has 2 voltage states, with one of the states being 0 volts. Since Unipolar line encoding has one of its states at 0 Volts, it is also called Return to Zero (RTZ). A common example of unipolar line encoding is the TTL logic levels used in computers and digital logic. 2. Polar Polar encoding uses two voltage levels, one positive and one negative. Example NRZI 3. Bi-Polar Bipolar encoding, like Rz uses three voltage levels ; positive, negative and zero Schemes Polar Return to Zero Return-to-zero describes a line code used in telecommunications signals in which the signal drops (returns) to zero between each pulse. This takes place even if a number of consecutive 0's or 1's occur in the signal. -

Chapter 3 Source Codes, Line Codes & Error Control
Chapter 3 Source Codes, Line Codes & Error Control 3.1 Primary Communication • Information theory deals with mathematical representation and anal- ysis of a communication system rather than physical sources and channels. • It is based on the application of probability theory i.e.,) calculation of probability of error. Discrete message The information source is said to be discrete if it emits only one symbol from finite number of symbols or message. • Let source generating `N' number of set of alphabets. X = fx1; x2; x3; ::::; xM g • The information source generates any one alphabet from the set. The probability of various symbols in X can be written as P (X = xk) = Pk k = 1; 2; ::::M M Pk = 1 (1) Xk=1 Discrete memoryless source (DMS) It is defined as when the current output symbol depends only on the cur- rent input symbol and not an any of the previous symbols. • Letter or symbol or character 3.2 Communication Enginnering – Any individual member of the alphabet set. • Message or word: – A finite sequence of letters of the alphabet set • Length of a word – Number of letters in a word • Encoding – Process of converting a word of finite set into another format of encoded word. • Decoding – Inverse process of converting a given encoded word to a origi- nal format. 3.2 Block Diagram of Digital Communication System Information Source Channel Base band Formatter source Encoder Encoder Modulator Channel Source Channel Base band Destination Deformatter Decoder Decoder Demodulator Fig .3.1 Typical communication system (or) Digital communication system Information source It may analog or digital. -
Principles of Communication Systems
For updated version, please click on http://ocw.ump.edu.my Principles of Communication Systems Chapter 4 (Part 3): Line Coding by Nurulfadzilah Hasan Faculty of Electrical & Electronics Engineering [email protected] Principles of Communicartion System by N Hasan By the end of this class you should be able to: • Explain the concept of different types of line coding • Solve problems involving line coding Principles of Communicartion System by N Hasan What is Line coding? • Process of converting binary data (sequence of bits) to a digital signal • The pattern of voltage, current or photons is modified to represent the digital data on a transmission link. • Ex. Binary “1” maps to +5V square pulse; Binary “0” to –5V pulse Principles of Communicartion System by N Hasan Line Coding Source: https://commons.wikimedia.org/wiki/File:Binary_Line_Code_Waveforms.png Principles of Communicartion System by N Hasan Why we need Line Coding ? • The purpose of line coding is to match the digital data output with the channel before transmission could take place. • Line coding also allow the following processed to be done to the digital data: 1. Synchronization 2. Error detection 3. Error correction Principles of Communicartion System by N Hasan Elements of line coding Principles of Communicartion System by N Hasan Data Rate versus Signal Rate 1 S c N baud r Principles of Communicartion System by N Hasan 1.7 Six main properties of line coding Principles of Communicartion System by N Hasan Line coding schemes Principles of Communicartion System by N Hasan Unipolar Encoding • Uses only one voltage level. • A positive voltage represents a binary 1 • Zero volts indicates a binary 0. -
Encoding Techniques
COMPUTER COMMUNICATION AND NETWORKS ENCODING TECHNIQUES Encoding • Coding is the process of embedding clocks into a given data stream and producing a signal that can be transmitted over a selected medium. • Transmitter is responsible for "encoding" i.e. inserting clocks into data according to a selected coding scheme • Receiver is responsible for "decoding" i.e. separating clocks and data from the incoming embedded stream. • Systems that use coding are synchronous systems . • We must encode data into signals to send them from one place to another. • There are 4 possible encoding techniques that can be used on the data: Digital-to-digital, Digital-to-Analog, Analog-to-analog, Analog-to-digital. Digital-to-Digital Encoding • The binary signals created by your computer (DTE) are translated into a sequence of voltage pulses that can be sent through the transmission medium. • Binary signals have two basic parameters: amplitude and duration. • As the number of bits sent per unit of time increases, the bit duration decreases. • The three most common methods of encoding used are: unipolar , polar , and bipolar . Digital-to-Digital Encoding Unipolar Encoding •The simplest and most primitive type of encoding is Unipolar encoding. •Typically, one voltage level stands for binary 0 and another voltage level for binary 1. •Polarity refers to whether you have a positive or a negative pulse. •Unipolar encoding uses only one polarity, only one of the two binary states is encoded, usually the 1. •Two problems with unipolar encoding: DC component and synchronization . 5 UNIPOLAR ENCODING Unipolar encoding uses only one voltage level. Problems in Unipolar encoding DC Component • Average amplitude of a unipolar encoded signal is nonzero.