G5 Electronic Flight Instrument Pilot's Guide for Certified Aircraft Blank Page SYSTEM OVERVIEW
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pitot-Static System Blockage Effects on Airspeed Indicator
The Dramatic Effects of Pitot-Static System Blockages and Failures by Luiz Roberto Monteiro de Oliveira . Table of Contents I ‐ Introduction…………………………………………………………………………………………………………….1 II ‐ Pitot‐Static Instruments…………………………………………………………………………………………..3 III ‐ Blockage Scenarios – Description……………………………..…………………………………….…..…11 IV ‐ Examples of the Blockage Scenarios…………………..……………………………………………….…15 V ‐ Disclaimer………………………………………………………………………………………………………………50 VI ‐ References…………………………………………………………………………………………….…..……..……51 Please also review and understand the disclaimer found at the end of the article before applying the information contained herein. I - Introduction This article takes a comprehensive look into Pitot-static system blockages and failures. These typically affect the airspeed indicator (ASI), vertical speed indicator (VSI) and altimeter. They can also affect the autopilot auto-throttle and other equipment that relies on airspeed and altitude information. There have been several commercial flights, more recently Air France's flight 447, whose crash could have been due, in part, to Pitot-static system issues and pilot reaction. It is plausible that the pilot at the controls could have become confused with the erroneous instrument readings of the airspeed and have unknowingly flown the aircraft out of control resulting in the crash. The goal of this article is to help remove or reduce, through knowledge, the likelihood of at least this one link in the chain of problems that can lead to accidents. Table 1 below is provided to summarize -
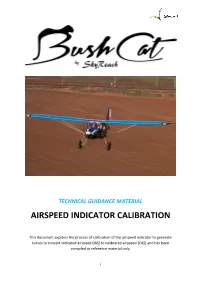
Airspeed Indicator Calibration
TECHNICAL GUIDANCE MATERIAL AIRSPEED INDICATOR CALIBRATION This document explains the process of calibration of the airspeed indicator to generate curves to convert indicated airspeed (IAS) to calibrated airspeed (CAS) and has been compiled as reference material only. i Technical Guidance Material BushCat NOSE-WHEEL AND TAIL-DRAGGER FITTED WITH ROTAX 912UL/ULS ENGINE APPROVED QRH PART NUMBER: BCTG-NT-001-000 AIRCRAFT TYPE: CHEETAH – BUSHCAT* DATE OF ISSUE: 18th JUNE 2018 *Refer to the POH for more information on aircraft type. ii For BushCat Nose Wheel and Tail Dragger LSA Issue Number: Date Published: Notable Changes: -001 18/09/2018 Original Section intentionally left blank. iii Table of Contents 1. BACKGROUND ..................................................................................................................... 1 2. DETERMINATION OF INSTRUMENT ERROR FOR YOUR ASI ................................................ 2 3. GENERATING THE IAS-CAS RELATIONSHIP FOR YOUR AIRCRAFT....................................... 5 4. CORRECT ALIGNMENT OF THE PITOT TUBE ....................................................................... 9 APPENDIX A – ASI INSTRUMENT ERROR SHEET ....................................................................... 11 Table of Figures Figure 1 Arrangement of instrument calibration system .......................................................... 3 Figure 2 IAS instrument error sample ........................................................................................ 7 Figure 3 Sample relationship between -

Sept. 12, 1950 W
Sept. 12, 1950 W. ANGST 2,522,337 MACH METER Filed Dec. 9, 1944 2 Sheets-Sheet. INVENTOR. M/2 2.7aar alwg,57. A77OAMA). Sept. 12, 1950 W. ANGST 2,522,337 MACH METER Filed Dec. 9, 1944 2. Sheets-Sheet 2 N 2 2 %/ NYSASSESSN S2,222,W N N22N \ As I, mtRumaIII-m- III It's EARAs i RNSITIE, 2 72/ INVENTOR, M247 aeawosz. "/m2.ATTORNEY. Patented Sept. 12, 1950 2,522,337 UNITED STATES ; :PATENT OFFICE 2,522,337 MACH METER Walter Angst, Manhasset, N. Y., assignor to Square D Company, Detroit, Mich., a corpora tion of Michigan Application December 9, 1944, Serial No. 567,431 3 Claims. (Cl. 73-182). is 2 This invention relates to a Mach meter for air plurality of posts 8. Upon one of the posts 8 are craft for indicating the ratio of the true airspeed mounted a pair of serially connected aneroid cap of the craft to the speed of sound in the medium sules 9 and upon another of the posts 8 is in which the aircraft is traveling and the object mounted a diaphragm capsuler it. The aneroid of the invention is the provision of an instrument s: capsules 9 are sealed and the interior of the cas-l of this type for indicating the Mach number of an . ing is placed in communication with the static aircraft in fight. opening of a Pitot static tube through an opening The maximum safe Mach number of any air in the casing, not shown. The interior of the dia craft is the value of the ratio of true airspeed to phragm capsule is connected through the tub the speed of sound at which the laminar flow of ing 2 to the Pitot or pressure opening of the Pitot air over the wings fails and shock Waves are en static tube through the opening 3 in the back countered. -

Beforethe Runway
EDITORIAL Before the runway By Professor Sidney dekker display with fl ight information. My airspeed is leaking out of Editors Note: This time, we decided to invite some the airplane as if the hull has been punctured, slowly defl at- comments on Professor Dekker’s article from subject ing like a pricked balloon. It looks bizarre and scary and the matter experts. Their responses follow the article. split second seems to last for an eternity. Yet I have taught myself to act fi rst and question later in situations like this. e are at 2,000 feet, on approach to the airport. The big So I act. After all, there is not a whole lot of air between me W jet is on autopilot, docile, and responsively follow- and the hard ground. I switch off the autothrottle and shove ing the instructions I have put into the various computer the thrust levers forward. From behind, I hear the engines systems. It follows the heading I gave it, and stays at the screech, shrill and piercing. Airspeed picks up. I switch off altitude I wanted it at. The weather is alright, but not great. the autopilot for good measure (or good riddance) and fl y Cloud base is around 1000 feet, there is mist, a cold driz- the jet down to the runway. It feels solid in my hands and zle. We should be on the ground in the next few minutes. docile again. We land. Then everything comes to a sudden I call for fl aps, and the other pilot selects them for me. -

FAA Advisory Circular AC 91-74B
U.S. Department Advisory of Transportation Federal Aviation Administration Circular Subject: Pilot Guide: Flight in Icing Conditions Date:10/8/15 AC No: 91-74B Initiated by: AFS-800 Change: This advisory circular (AC) contains updated and additional information for the pilots of airplanes under Title 14 of the Code of Federal Regulations (14 CFR) parts 91, 121, 125, and 135. The purpose of this AC is to provide pilots with a convenient reference guide on the principal factors related to flight in icing conditions and the location of additional information in related publications. As a result of these updates and consolidating of information, AC 91-74A, Pilot Guide: Flight in Icing Conditions, dated December 31, 2007, and AC 91-51A, Effect of Icing on Aircraft Control and Airplane Deice and Anti-Ice Systems, dated July 19, 1996, are cancelled. This AC does not authorize deviations from established company procedures or regulatory requirements. John Barbagallo Deputy Director, Flight Standards Service 10/8/15 AC 91-74B CONTENTS Paragraph Page CHAPTER 1. INTRODUCTION 1-1. Purpose ..............................................................................................................................1 1-2. Cancellation ......................................................................................................................1 1-3. Definitions.........................................................................................................................1 1-4. Discussion .........................................................................................................................6 -

Use of the MS Flight Simulator in the Teaching of the Introduction to Avionics Course
Session 1928 Use of the MS Flight Simulator in the teaching of the Introduction to avionics course Iulian Cotoi, Ruxandra Mihaela Botez Ecole de technologie supérieure Département de génie de la production automatisée 1100 Notre Dame Ouest Montréal, Qué., Canada, H3C 1K3 Introduction The course Introduction to avionics GPA-745 is an optional course in the Aerospace program given in the Department of Automated Production Engineering at École de technologie supérieure in Montreal, Canada. The main objectif of this course is the study of electronic avionics instrumentation installed in aircraft. In this course, the following chapters are presented : History of avionics, Methods of navigation and orientation, Pilot cockpit and board instrumentation, Communication systems, Radio-navigation systems, Landing systems, Engine signalization instruments, Central alarm systems, Maintenance systems and Warning systems. The presentation of the course in the class to the students is shown on PowerPoint slides and videos on modern aircraft such as Airbus and Boeing. Also, regarding the pilot induced oscillations a video film is provided from Bombardier Aerospace. However, the presentation of the course in the class may be improved and become more efficient grace to the use of MS Flight Simulator. The main idea of this paper is to show how the participation of the students in the class will be increased by use of the MS Flight Simulator. The use of the systems and the electronic board instrumentation will be shown with the help of the new flight simulations modules realized within the MS Flight Simulator. For each instrument, one module will be created and presented in the class, which will result in a more interesting course presentation, stimulating and dynamical from pedagogical point of view, than the theory of the course by use of PowerPoint. -

Module-7 Lecture-29 Flight Experiment
Module-7 Lecture-29 Flight Experiment: Instruments used in flight experiment, pre and post flight measurement of aircraft c.g. Module Agenda • Instruments used in flight experiments. • Pre and post flight measurement of center of gravity. • Experimental procedure for the following experiments. (a) Cruise Performance: Estimation of profile Drag coefficient (CDo ) and Os- walds efficiency (e) of an aircraft from experimental data obtained during steady and level flight. (b) Climb Performance: Estimation of Rate of Climb RC and Absolute and Service Ceiling from experimental data obtained during steady climb flight (c) Estimation of stick free and fixed neutral and maneuvering point using flight data. (d) Static lateral-directional stability tests. (e) Phugoid demonstration (f) Dutch roll demonstration 1 Instruments used for experiments1 1. Airspeed Indicator: The airspeed indicator shows the aircraft's speed (usually in knots ) relative to the surrounding air. It works by measuring the ram-air pressure in the aircraft's Pitot tube. The indicated airspeed must be corrected for air density (which varies with altitude, temperature and humidity) in order to obtain the true airspeed, and for wind conditions in order to obtain the speed over the ground. 2. Attitude Indicator: The attitude indicator (also known as an artificial horizon) shows the aircraft's relation to the horizon. From this the pilot can tell whether the wings are level and if the aircraft nose is pointing above or below the horizon. This is a primary instrument for instrument flight and is also useful in conditions of poor visibility. Pilots are trained to use other instruments in combination should this instrument or its power fail. -

Teledyne Lecroy Product Line Card
Product Line Card OSCILLOSCOPES Learn More: teledynelecroy.com/oscilloscope LabMaster 10 Zi-A WaveMaster 8 Zi-B (SDA Models) (SDA/DDA 8 Zi-B) Bandwidth 20 GHz to 65 GHz 4 GHz to 30 GHz Resolution 8-bit resolution, 8-bit resolution, 11-bit with enhanced resolution 11-bit with enhanced resolution Rise Time 6.5 ps to 19.3 ps 15.5 ps to 95 ps Channels Up to 80, 4, (Analog+Digital+Sensor) 80 + 18 4 + 18 Display 15.3" WXGA Touch Screen 15.3" WXGA Touch Screen Standard Memory 32 Mpts/Ch 32 Mpts/Ch (64 Mpts/Ch) (64 Mpts/Ch) Maximum Memory† Up to 1024 Mpts Up to 512 Mpts Sample Rate Up to 160 GS/s Up to 80 GS/s MSO Characteristics† 3 GHz, 12.5 GS/s, 3 GHz, 12.5 GS/s, (Digital Channels) 18 Ch 18 Ch Trigger Types Edge, Width, Glitch, Pattern, Runt, Slew Rate, Edge, Width, Glitch, Pattern, Video, HDTV, Interval (Period), Dropout, Qualified, Cascade (Sequence) Trigger, Runt, Slew Rate, Interval (Period), Dropout, Qualified, Cascade High-speed Serial Trigger† (Sequence) Trigger, High-speed Serial Trigger† † Serial Data TD: 80-bit NRZ, 8b/10b, 64b/66b TD: 80-bit NRZ, 8b/10b, 64b/66b, RS-232, UART Trigger (T) D: 64b66b, 8b/10b, ARINC 429, Audio, TD or TDME: 100Base-T1, CAN, CAN FD, CAN FD Symbolic, Decode (D) CAN, CAN FD, CAN FD Symbolic, DigRF 3G, DigRF v4, I2C, LIN, MIL-STD-1553, SPI, Measure / Graph (M) ENET, ENET 10G, Fibre Channel, I2C, LIN, TD or TDxx: Audio (TDG), FlexRay (TDMP) Eye Diagram (E) Manchester, MDIO, MIL-STD-1553, NRZ, PCIe, RS-232. -

Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform
International Journal of Mechanical Engineering and Robotics Research Vol. 5, No. 1, January 2016 Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform Şeyma Akyürek, Gizem Sezin Özden, Emre Atlas, and Coşku Kasnakoğlu Electrical & Electronics Engineering, TOBB University of Economics & Technology, Ankara, Turkey Email: {seymaakyurek , sezin.ozden, emreatlas90, kasnakoglu}@gmail.com Ünver Kaynak Mechanical Engineering, TOBB University of Economics & Technology, Ankara, Turkey Email: [email protected] Abstract—In this paper a Hardware-In-the-Loop (HIL) test Both manual calibration and MATLAB’s automated platform is used to design a flight stabilization system for design tools are used to determine the PID coefficients. Unmanned Aerial Vehicles (UAV). Controllers are first designed and tested separately for lateral and longitudinal II. DESIGN STAGES axes using numerical simulations, and later these controllers are merged on the HIL platform. It is observed that the A. Controller Design resulting controller successfully stabilizes the aircraft to A general treatment of the stability and control of achieve straight and level flight. airplanes requires a study of the dynamics of flight [4]. Much useful information can be obtained, however, from Index Terms—UAV, autopilot, PID controller, Hardware-In- a more limited view, in which we consider not the motion the-Loop, flight control, SISO, MIMO of the airplane, but only its equilibrium states. This is the approach in what is commonly known as static stability and control analysis [4]. I. INTRODUCTION Elevators and ailerons are flight control surfaces. Elevators are surfaces on the tailplane (the horizontal part Aeronautics has recently gained great importance in of the tail assembly). -
ARINC Protocol Tutorial
ARINC Protocol Tutorial Copyrights ARINC Protocol Tutorial Manual Copyright 2000 Condor Engineering, Inc. This software product is copyrighted and all rights are reserved. The distribution and sale of this product are intended for the use of the original purchaser only per the terms of the License Agreement. This ARINC Protocol Tutorial Manual is copyrighted and all rights are reserved. This document may not, in whole or part, be; copied; photocopied; reproduced; translated; reduced or transferred to any electronic medium or machine-readable form without prior consent in writing from Condor Engineering, Inc. Microsoft is a registered trademark of Microsoft Corporation Windows is a registered trademark of Microsoft Corporation ARINC Protocol Tutorial (1600100-0027) Document Date: 07 June, 2000 Document Revision: 1.04 Condor Engineering, Inc. 101 W. Anapamu Street Santa Barbara, CA 93101 (805) 965-8000 (805) 963-9630 (fax) [email protected] (email) http:\www.condoreng.com Contents and Tables Contents Chapter 1 ARINC 429 Tutorial Introduction....................................................................................................1 About ARINC................................................................................................2 What is ARINC 429?...............................................................................2 ARINC 429 Usage ...................................................................................3 ARINC 429 Electrical Characteristics..........................................................3 -

Ensure Increased Reliability with ARINC 429 IP Core for FPGA
Ensure increased reliability with ARINC 429 IP Core for FPGA DO-254 compliant offering with multichannel ARINC 429 transmitter/receiver core Overview Cyient IP Core Features ARINC 429 specification defines the standard • Developed according to DO-254 (DAL-A) requirements for the transfer of engineering data guidelines between avionics systems on commercial aircraft • Two transmitters and eight receivers with supporting high speeds of up to 100 kHz as well loopback mode for self -testing as speeds as low as 12.5 kHz. The ARINC protocol • Portable to Microsemi, Intel/Altera, Lattice, or supports more than 46 meters. Xilinx FPGA families The Cyient ARINC 429 IP Core is developed for • Supports standard line drivers and receivers FPGA with multiple transmitters and receivers and • Parity checking for Tx and Rx is compliant with Design Assurance Level (DAL) • Programmable labels (up to eight different labels) A requirements. It receives data from an external • Programmable label filtering and SDI check microcontroller through SPI lines and transmits • SPI interface to the microcontroller 32-bit data word (encoded serial data) through the ARINC line driver. ARINC429 IP Core receives • Programmable data rates for each channel: 12.5 serial data from the ARINC line receiver and or 100 kbps transmits 32-bit decoded data word to an external • Detection of parity, label, SDI, and data errors microcontroller. Fig. 1 | ARINC 429 Board FPGA RX FIFO RxHi 8 Arinc ARINC RX RxLow Line Receivers Parity Check SDI & Label Check SPI TX FIFO Micro Controller Micro TxHi 2 Arinc ARINC TX Tx Low Line Control and Status Registers and Status Control Drivers Parity Gen Error Injection Fig. -

Radar Altimeter True Altitude
RADAR ALTIMETER TRUE ALTITUDE. TRUE SAFETY. ROBUST AND RELIABLE IN RADARDEMANDING ENVIRONMENTS. Building on systems engineering and integration know-how, FreeFlight Systems effectively implements comprehensive, high-integrity avionics solutions. We are focused on the practical application of NextGen technology to real-world operational needs — OEM, retrofit, platform or infrastructure. FreeFlight Systems is a community of respected innovators in technologies of positioning, state-sensing, air traffic management datalinks — including rule-compliant ADS-B systems, data and flight management. An international brand, FreeFlight Systems is a trusted partner as well as a direct-source provider through an established network of relationships. 3 GENERATIONS OF EXPERIENCE BEHIND NEXTGEN AVIONICS NEXTGEN LEADER. INDUSTRY EXPERT. TRUSTED PARTNER. SHAPE THE SKIES. RADAR ALTIMETERS FreeFlight Systems’ certified radar altimeters work consistently in the harshest environments including rotorcraft low altitude hover and terrain transitions. RADAROur radar altimeter systems integrate with popular compatible glass displays. AL RA-4000/4500 & FreeFlight Systems modern radar altimeters are backed by more than 50 years of experience, and FRA-5500 RADAR ALTIMETERS have a proven track record as a reliable solution in Model RA-4000 RA-4500 FRA-5500 the most challenging and critical segments of flight. The TSO and ETSO-approved systems are extensively TSO-C87 l l l deployed worldwide in helicopter fleets, including ETSO-2C87 l l l some of the largest HEMS operations worldwide. DO-160E l l l DO-178 Level B l Designed for helicopter and seaplane operations, our DO-178B Level C l l radar altimeters provide precise AGL information from 2,500 feet to ground level.