Pdf: Software Testing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Programming Paradigms & Object-Oriented
4.3 (Programming Paradigms & Object-Oriented- Computer Science 9608 Programming) with Majid Tahir Syllabus Content: 4.3.1 Programming paradigms Show understanding of what is meant by a programming paradigm Show understanding of the characteristics of a number of programming paradigms (low- level, imperative (procedural), object-oriented, declarative) – low-level programming Demonstrate an ability to write low-level code that uses various address modes: o immediate, direct, indirect, indexed and relative (see Section 1.4.3 and Section 3.6.2) o imperative programming- see details in Section 2.3 (procedural programming) Object-oriented programming (OOP) o demonstrate an ability to solve a problem by designing appropriate classes o demonstrate an ability to write code that demonstrates the use of classes, inheritance, polymorphism and containment (aggregation) declarative programming o demonstrate an ability to solve a problem by writing appropriate facts and rules based on supplied information o demonstrate an ability to write code that can satisfy a goal using facts and rules Programming paradigms 1 4.3 (Programming Paradigms & Object-Oriented- Computer Science 9608 Programming) with Majid Tahir Programming paradigm: A programming paradigm is a set of programming concepts and is a fundamental style of programming. Each paradigm will support a different way of thinking and problem solving. Paradigms are supported by programming language features. Some programming languages support more than one paradigm. There are many different paradigms, not all mutually exclusive. Here are just a few different paradigms. Low-level programming paradigm The features of Low-level programming languages give us the ability to manipulate the contents of memory addresses and registers directly and exploit the architecture of a given processor. -

January 1993 Reason Toexpect That to Theresearchcommunity
COMPUTING R ESEARCH N EWS The News Journal of the Computing Research Association January 1993 Vol. 5/No. 1 Membership of Congress changes significantly BY Fred W. Weingarten also was re-elected. He has proven to be attention on high-technology, the seniority for chair of that subcommit- CRA Staff an effective and well-informed chair, committee possibly will attract more tee. His attitude toward science and Although incumbents fared better in but given the turnover in the House members. But it will never have the technology is not well-known. and his rising political star, he may not attraction or political power of the the November elections than was Senate expected, the membership of Congress remain active in R&D policy. Boucher Energy and Commerce Committee, the has changed significantly. Congress has also served on the Energy and Com- Ways and Means Committee or the The Senate is stable because there 118 new members, and some key merce Subcommittee on Telecommuni- Appropriations Committee, which also was less turn-over and science is under members were defeated or retired, so cations and Finance, where he ex- will have openings. Unless they have the Commerce Committee, which is a there will be quite a bit of change in the pressed a great deal of interest in specific interests and expertise in plum. Vice President-elect Al Gore will membership of committees and stimulating the creation of a broadband, science and technology, members with be replaced as chair of the science subcommittees concerned with digital national information infrastruc- seniority and influence tend to gravitate subcommittee. -

Bioconductor: Open Software Development for Computational Biology and Bioinformatics Robert C
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Collection Of Biostatistics Research Archive Bioconductor Project Bioconductor Project Working Papers Year 2004 Paper 1 Bioconductor: Open software development for computational biology and bioinformatics Robert C. Gentleman, Department of Biostatistical Sciences, Dana Farber Can- cer Institute Vincent J. Carey, Channing Laboratory, Brigham and Women’s Hospital Douglas J. Bates, Department of Statistics, University of Wisconsin, Madison Benjamin M. Bolstad, Division of Biostatistics, University of California, Berkeley Marcel Dettling, Seminar for Statistics, ETH, Zurich, CH Sandrine Dudoit, Division of Biostatistics, University of California, Berkeley Byron Ellis, Department of Statistics, Harvard University Laurent Gautier, Center for Biological Sequence Analysis, Technical University of Denmark, DK Yongchao Ge, Department of Biomathematical Sciences, Mount Sinai School of Medicine Jeff Gentry, Department of Biostatistical Sciences, Dana Farber Cancer Institute Kurt Hornik, Computational Statistics Group, Department of Statistics and Math- ematics, Wirtschaftsuniversitat¨ Wien, AT Torsten Hothorn, Institut fuer Medizininformatik, Biometrie und Epidemiologie, Friedrich-Alexander-Universitat Erlangen-Nurnberg, DE Wolfgang Huber, Department for Molecular Genome Analysis (B050), German Cancer Research Center, Heidelberg, DE Stefano Iacus, Department of Economics, University of Milan, IT Rafael Irizarry, Department of Biostatistics, Johns Hopkins University Friedrich Leisch, Institut fur¨ Statistik und Wahrscheinlichkeitstheorie, Technische Universitat¨ Wien, AT Cheng Li, Department of Biostatistical Sciences, Dana Farber Cancer Institute Martin Maechler, Seminar for Statistics, ETH, Zurich, CH Anthony J. Rossini, Department of Medical Education and Biomedical Informat- ics, University of Washington Guenther Sawitzki, Statistisches Labor, Institut fuer Angewandte Mathematik, DE Colin Smith, Department of Molecular Biology, The Scripps Research Institute, San Diego Gordon K. -

Testing E-Commerce Systems: a Practical Guide - Wing Lam
Testing E-Commerce Systems: A Practical Guide - Wing Lam As e-customers (whether business or consumer), we are unlikely to have confidence in a Web site that suffers frequent downtime, hangs in the middle of a transaction, or has a poor sense of usability. Testing, therefore, has a crucial role in the overall development process. Given unlimited time and resources, you could test a system to exhaustion. However, most projects operate within fixed budgets and time scales, so project managers need a systematic and cost- effective approach to testing that maximizes test confidence. This article provides a quick and practical introduction to testing medium- to large-scale transactional e-commerce systems based on project experiences developing tailored solutions for B2C Web retailing and B2B procurement. Typical of most e-commerce systems, the application architecture includes front-end content delivery and management systems, and back-end transaction processing and legacy integration. Aimed primarily at project and test managers, this article explains how to · establish a systematic test process, and · test e-commerce systems. The Test Process You would normally expect to spend between 25 to 40 percent of total project effort on testing and validation activities. Most seasoned project managers would agree that test planning needs to be carried out early in the project lifecycle. This will ensure the time needed for test preparation (establishing a test environment, finding test personnel, writing test scripts, and so on) before any testing can actually start. The different kinds of testing (unit, system, functional, black-box, and others) are well documented in the literature. -

Writing Quality Software
Writing Quality Software About this white paper: This whitepaper was written by David C. Young, an employee of General Dynamics Information Technology (GDIT). Dr. Young is part of a team of GDIT employees who maintain, and support high performance computing systems at the Alabama Supercomputer Center (ASC). This was written in 2020. This paper is written for people who want to write good software, but don’t have a master’s degree in software architecture (or someone managing the project who does). Much of what is here would be covered in a software development practices class, often taught at the master’s degree level. Writing quality software is not only about the satisfaction of a job well done. It is also reflects on you and your professional reputation amongst your peers. In some cases writing quality software can be a factor in getting a job, losing a job, or even life or death. Furthermore, writing quality software should be considered an implicit requirement in every software development project. If the intended useful life of the software is many years, that is yet another reason to do a good job writing it. Introduction Consider this situation, which is all too common. You have written a really neat piece of software. You put it out on github, then tell your colleagues about it. Soon you are bombarded with a series of complaints from people who tried to install, and use your software. Some of those complaints might be; • It won’t install on their version of Linux. • They did the same thing you reported, but got a different answer. -

Studying the Feasibility and Importance of Software Testing: an Analysis
Dr. S.S.Riaz Ahamed / Internatinal Journal of Engineering Science and Technology Vol.1(3), 2009, 119-128 STUDYING THE FEASIBILITY AND IMPORTANCE OF SOFTWARE TESTING: AN ANALYSIS Dr.S.S.Riaz Ahamed Principal, Sathak Institute of Technology, Ramanathapuram,India. Email:[email protected], [email protected] ABSTRACT Software testing is a critical element of software quality assurance and represents the ultimate review of specification, design and coding. Software testing is the process of testing the functionality and correctness of software by running it. Software testing is usually performed for one of two reasons: defect detection, and reliability estimation. The problem of applying software testing to defect detection is that software can only suggest the presence of flaws, not their absence (unless the testing is exhaustive). The problem of applying software testing to reliability estimation is that the input distribution used for selecting test cases may be flawed. The key to software testing is trying to find the modes of failure - something that requires exhaustively testing the code on all possible inputs. Software Testing, depending on the testing method employed, can be implemented at any time in the development process. Keywords: verification and validation (V & V) 1 INTRODUCTION Testing is a set of activities that could be planned ahead and conducted systematically. The main objective of testing is to find an error by executing a program. The objective of testing is to check whether the designed software meets the customer specification. The Testing should fulfill the following criteria: ¾ Test should begin at the module level and work “outward” toward the integration of the entire computer based system. -
Interpreting Reliability and Availability Requirements for Network-Centric Systems What MCOTEA Does
Marine Corps Operational Test and Evaluation Activity Interpreting Reliability and Availability Requirements for Network-Centric Systems What MCOTEA Does Planning Testing Reporting Expeditionary, C4ISR & Plan Naval, and IT/Business Amphibious Systems Systems Test Evaluation Plans Evaluation Reports Assessment Plans Assessment Reports Test Plans Test Data Reports Observation Plans Observation Reports Combat Ground Service Combat Support Initial Operational Test Systems Systems Follow-on Operational Test Multi-service Test Quick Reaction Test Test Observations 2 Purpose • To engage test community in a discussion about methods in testing and evaluating RAM for software-intensive systems 3 Software-intensive systems – U.S. military one of the largest users of information technology and software in the world [1] – Dependence on these types of systems is increasing – Software failures have had disastrous consequences Therefore, software must be highly reliable and available to support mission success 4 Interpreting Requirements Excerpts from capabilities documents for software intensive systems: Availability Reliability “The system is capable of achieving “Average duration of 716 hours a threshold operational without experiencing an availability of 95% with an operational mission fault” objective of 98%” “Mission duration of 24 hours” “Operationally Available in its intended operating environment “Completion of its mission in its with at least a 0.90 probability” intended operating environment with at least a 0.90 probability” 5 Defining Reliability & Availability What do we mean reliability and availability for software intensive systems? – One consideration: unlike traditional hardware systems, a highly reliable and maintainable system will not necessarily be highly available - Highly recoverable systems can be less available - A system that restarts quickly after failures can be highly available, but not necessarily reliable - Risk in inflating availability and underestimating reliability if traditional equations are used. -

Paradigms of Computer Programming
Paradigms of computer programming l This course aims to teach programming as a unified discipline that covers all programming languages l We cover the essential concepts and techniques in a uniform framework l Second-year university level: requires some programming experience and mathematics (sets, lists, functions) l The course covers four important themes: l Programming paradigms l Mathematical semantics of programming l Data abstraction l Concurrency l Let’s see how this works in practice Hundreds of programming languages are in use... So many, how can we understand them all? l Key insight: languages are based on paradigms, and there are many fewer paradigms than languages l We can understand many languages by learning few paradigms! What is a paradigm? l A programming paradigm is an approach to programming a computer based on a coherent set of principles or a mathematical theory l A program is written to solve problems l Any realistic program needs to solve different kinds of problems l Each kind of problem needs its own paradigm l So we need multiple paradigms and we need to combine them in the same program How can we study multiple paradigms? l How can we study multiple paradigms without studying multiple languages (since most languages only support one, or sometimes two paradigms)? l Each language has its own syntax, its own semantics, its own system, and its own quirks l We could pick three languages, like Java, Erlang, and Haskell, and structure our course around them l This would make the course complicated for no good reason -

The Machine That Builds Itself: How the Strengths of Lisp Family
Khomtchouk et al. OPINION NOTE The Machine that Builds Itself: How the Strengths of Lisp Family Languages Facilitate Building Complex and Flexible Bioinformatic Models Bohdan B. Khomtchouk1*, Edmund Weitz2 and Claes Wahlestedt1 *Correspondence: [email protected] Abstract 1Center for Therapeutic Innovation and Department of We address the need for expanding the presence of the Lisp family of Psychiatry and Behavioral programming languages in bioinformatics and computational biology research. Sciences, University of Miami Languages of this family, like Common Lisp, Scheme, or Clojure, facilitate the Miller School of Medicine, 1120 NW 14th ST, Miami, FL, USA creation of powerful and flexible software models that are required for complex 33136 and rapidly evolving domains like biology. We will point out several important key Full list of author information is features that distinguish languages of the Lisp family from other programming available at the end of the article languages and we will explain how these features can aid researchers in becoming more productive and creating better code. We will also show how these features make these languages ideal tools for artificial intelligence and machine learning applications. We will specifically stress the advantages of domain-specific languages (DSL): languages which are specialized to a particular area and thus not only facilitate easier research problem formulation, but also aid in the establishment of standards and best programming practices as applied to the specific research field at hand. DSLs are particularly easy to build in Common Lisp, the most comprehensive Lisp dialect, which is commonly referred to as the “programmable programming language.” We are convinced that Lisp grants programmers unprecedented power to build increasingly sophisticated artificial intelligence systems that may ultimately transform machine learning and AI research in bioinformatics and computational biology. -

QA and Testing Have Become More of a Concurrent Process
Special Feature: SW Testing “QA and testing have become more of a concurrent process rather than an end of lifecycle process” Manish Tandon, VP & Head– Independent Validation and Testing Solutions, Infosys Interview by: Anil Chopra, PCQuest n an exclusive interview with the PCQuest Editor, Manish talks become a software tester? about the global trends in software testing, skillsets required Software testing has evolved into a very special function and Ito enter the field, how technology has evolved in this area to anybody wanting to enter the domain requires two special provide higher ROI, and much more. An IIT and IIM graduate, skillsets. One is deep functional or domain skills to understand Manish is responsible for formulating and executing the business the functionality. Plus, you need specialized technical skills strategy for Independent Validation and Testing Solutions practice as well because you want to do automation, middleware, and at Infosys. He mentors the unit specifically in meeting business performance testing. It’s a unique combination, and we focus goals and targets. In addition, he manages critical relationships very strongly on both these dimensions. A good software tester with client executives, industry analysts, deal consultants, and should always have an eye for detail. So people who have a slightly anchors the training and development of key personnel. Provided critical eye and are willing to dig deeper always make much better here are his expert comments on the subject. testers than people who want to fly at 30k feet. Q> What are some of the global trends in the software Q> You mentioned that software testing is now required testing business? How do you see the market moving? for front-end applications. -

Scripting: Higher- Level Programming for the 21St Century
. John K. Ousterhout Sun Microsystems Laboratories Scripting: Higher- Cybersquare Level Programming for the 21st Century Increases in computer speed and changes in the application mix are making scripting languages more and more important for the applications of the future. Scripting languages differ from system programming languages in that they are designed for “gluing” applications together. They use typeless approaches to achieve a higher level of programming and more rapid application development than system programming languages. or the past 15 years, a fundamental change has been ated with system programming languages and glued Foccurring in the way people write computer programs. together with scripting languages. However, several The change is a transition from system programming recent trends, such as faster machines, better script- languages such as C or C++ to scripting languages such ing languages, the increasing importance of graphical as Perl or Tcl. Although many people are participat- user interfaces (GUIs) and component architectures, ing in the change, few realize that the change is occur- and the growth of the Internet, have greatly expanded ring and even fewer know why it is happening. This the applicability of scripting languages. These trends article explains why scripting languages will handle will continue over the next decade, with more and many of the programming tasks in the next century more new applications written entirely in scripting better than system programming languages. languages and system programming -
Reliability: Software Software Vs
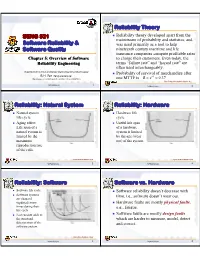
Reliability Theory SENG 521 Re lia bility th eory d evel oped apart f rom th e mainstream of probability and statistics, and Software Reliability & was usedid primar ily as a tool to h hlelp Software Quality nineteenth century maritime and life iifiblinsurance companies compute profitable rates Chapter 5: Overview of Software to charge their customers. Even today, the Reliability Engineering terms “failure rate” and “hazard rate” are often used interchangeably. Department of Electrical & Computer Engineering, University of Calgary Probability of survival of merchandize after B.H. Far ([email protected]) 1 http://www. enel.ucalgary . ca/People/far/Lectures/SENG521/ ooene MTTF is R e 0.37 From Engineering Statistics Handbook [email protected] 1 [email protected] 2 Reliability: Natural System Reliability: Hardware Natural system Hardware life life cycle. cycle. Aging effect: Useful life span Life span of a of a hardware natural system is system is limited limited by the by the age (wear maximum out) of the system. reproduction rate of the cells. Figure from Pressman’s book Figure from Pressman’s book [email protected] 3 [email protected] 4 Reliability: Software Software vs. Hardware So ftware life cyc le. Software reliability doesn’t decrease with Software systems time, i.e., software doesn’t wear out. are changed (updated) many Hardware faults are mostly physical faults, times during their e. g., fatigue. life cycle. Each update adds to Software faults are mostly design faults the structural which are harder to measure, model, detect deterioration of the and correct. software system. Figure from Pressman’s book [email protected] 5 [email protected] 6 Software vs.