Kalman Filtering Over Gilbert–Elliott Channels: Stability Conditions and Critical Curve Junfeng Wu , Guodong Shi , Brian D
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Curriculum Vitae of Karl Henrik Johansson
Curriculum Vitae of Karl Henrik Johansson Personal Data Name Karl Henrik Johansson Work address Dept of Automatic Control School of Electrical Engineering and Computer Science KTH Royal Institute of Technology SE–100 44 Stockholm, Sweden Mobile: +46 73 404 7321 [email protected] http://people.kth.se/˜kallej Home address Tornrosv¨ agen¨ 72 SE–181 61 Lidingo,¨ Sweden Born Vaxj¨ o,¨ Sweden, June 14, 1967 Citizenship Swedish Civil status Married to Liselott Johansson; Sons, Kasper and Felix, born 1999 and 2002 Languages Swedish, native; English, fluent; German, good Degrees Docent in Automatic Control, Royal Institute of Technology, Sweden, May 2002. Doctor of Philosophy in Engineering (Automatic Control), Lund University, Sweden, November 1997. Ad- visors: Prof.’s Karl Johan Astr˚ om¨ and Anders Rantzer. Master of Science in Electrical Engineering, Lund University, January 1992. GPA 4.7 (5.0). Academic Appointments Director, Digital Futures, from 2020. Distinguished Professor (radsprofessor˚ ), Swedish Research Council, 2018–2027. Distinguished Professor of Overseas Academician, Zhejiang University, China, from 2018. Visiting Researcher, Department of Electrical Engineering and Computer Sciences, University of California at Berkeley, CA, August 2016–August 2017. Invited by Profs. Shankar Sastry and Claire Tomlin. International Chair Adjunct Professor, Norwegian University of Science and Technology, Norway, 2016– 2019. Visiting Fellow, Institute of Advanced Study, Hong Kong University of Science and Technology, Hong Kong, May 2015–April 2016. Qiushi Dinstinguished Adjunct Professor, Zhejiang University, China, February 2015–February 2018. Visiting Professor, School of Electrical and Electronic Engineering, Nanyang Technological University, Sin- gapore, 2014–2017. 1 Director, Strategic Research Area ICT The Next Generation (TNG), 2013–2019 (Deputy Director 2010– 2012). -

Emergent Behaviors Over Signed Random Dynamical Networks: Relative-State-Flipping Model Guodong Shi, Member, IEEE, Alexandre Proutiere, Mikael Johansson, John S
IEEE TRANSACTIONS ON CONTROL OF NETWORK SYSTEMS, VOL. 4, NO. 2, JUNE 2017 369 Emergent Behaviors Over Signed Random Dynamical Networks: Relative-State-Flipping Model Guodong Shi, Member, IEEE, Alexandre Proutiere, Mikael Johansson, John S. Baras, Life Fellow, IEEE, and Karl Henrik Johansson, Fellow, IEEE Abstract—We study asymptotic dynamical patterns that emerge Consensus problems aim to compute a weighted average of among a set of nodes interacting in a dynamically evolving signed the initial values held by a collection of nodes, in a distributed random network, where positive links carry out standard consen- manner. The DeGroot’s model [2], as a standard consensus sus, and negative links induce relative-state flipping. A sequence of deterministic signed graphs defines potential node interactions algorithm, described how opinions evolve in a network of that take place independently. Each node receives a positive rec- agents and showed that a simple deterministic opinion update ommendation consistent with the standard consensus algorithm based on the mutual trust and the differences in belief be- from its positive neighbors, and a negative recommendation de- tween interacting agents could lead to global convergence of fined by relative-state flipping from its negative neighbors. After the beliefs. Consensus dynamics have since then been widely receiving these recommendations, each node puts a deterministic weight to each recommendation, and then encodes these weighted adopted for describing opinion dynamics in social networks, recommendations in its state update through stochastic attentions for example, [6], [7], and [14]. In engineering sciences, a huge defined by two Bernoulli random variables. We establish a number amount of literature has studied these algorithms for distributed of conditions regarding almost sure convergence and divergence of averaging, formation forming, and load balancing between the node states. -

An Improved Stability Condition for Kalman Filtering with Bounded Markovian Packet Losses✩
Automatica 62 (2015) 32–38 Contents lists available at ScienceDirect Automatica journal homepage: www.elsevier.com/locate/automatica Brief paper An improved stability condition for Kalman filtering with bounded Markovian packet lossesI Junfeng Wu a, Ling Shi b, Lihua Xie c, Karl Henrik Johansson a a ACCESS Linnaeus Center, School of Electrical Engineering, Royal Institute of Technology, Stockholm, Sweden b Department of Electronic and Computer Engineering, Hong Kong University of Science and Technology, Hong Kong c School of Electrical and Electronic Engineering, Nanyang Technological University, Singapore article info a b s t r a c t Article history: In this paper, we consider the peak-covariance stability of Kalman filtering subject to packet losses. The Received 22 January 2015 length of consecutive packet losses is governed by a time-homogeneous finite-state Markov chain. We Received in revised form establish a sufficient condition for peak-covariance stability and show that this stability check can be 21 May 2015 recast as a linear matrix inequality (LMI) feasibility problem. Compared with the literature, the stability Accepted 21 August 2015 condition given in this paper is invariant with respect to similarity state transformations; moreover, our Available online 8 October 2015 condition is proved to be less conservative than the existing results. Numerical examples are provided to demonstrate the effectiveness of our result. Keywords: Networked control systems ' 2015 Elsevier Ltd. All rights reserved. Kalman filtering Estimation theory Packet losses Stability 1. Introduction works assume the packet drops, due to the Gilbert–Elliott channel (Gilbert, 1960; Elliott, 1963), are governed by a time-homogeneous Networked control systems are closed-loop systems, wherein Markov chain. -

Åström, Karl Johan
Activity Report: Automatic Control 1994-1995 Dagnegård, Eva; Åström, Karl Johan 1995 Document Version: Publisher's PDF, also known as Version of record Link to publication Citation for published version (APA): Dagnegård, E., & Åström, K. J. (Eds.) (1995). Activity Report: Automatic Control 1994-1995. (Annual Reports TFRT-4023). Department of Automatic Control, Lund Institute of Technology (LTH). Total number of authors: 2 General rights Unless other specific re-use rights are stated the following general rights apply: Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal Read more about Creative commons licenses: https://creativecommons.org/licenses/ Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. LUND UNIVERSITY PO Box 117 221 00 Lund +46 46-222 00 00 Activity Report Automatic Control 1994-1995 Department of Automatic Control Lund Institute of Technology Mailing address -

A Virtual Laboratory for Micro-Grid Information and Communication
2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Berlin 1 A Virtual Laboratory for Micro-Grid Information and Communication Infrastructures James Weimer, Yuzhe Xu, Carlo Fischione, Karl Henrik Johansson, Per Ljungberg, Craig Donovan, Ariane Sutor, Lennart E. Fahlén Abstract—Testing smart grid information and com- these challenges, the European Institute of Technology munication (ICT) infrastructures is imperative to en- (EIT) Information and Communication Technology (ICT) sure that they meet industry requirements and stan- Labs has introduce the action-line Smart Energy Systems dards and do not compromise the grid reliability. Within the micro-grid, this requires identifying and (SES) to develop a Europe-wide coalition of academic and testing ICT infrastructures for communication between industrial partners and resources in the ICT sector to ac- distributed energy resources, building, substations, etc. celerate innovation in energy management and green ICT To evaluate various ICT infrastructures for micro-grid management. The virtual micro-grid laboratory described deployment, this work introduces the Virtual Micro- in this work is part of the EIT ICT Labs SES virtual smart Grid Laboratory (VMGL) and provides a preliminary analysis of Long-Term Evolution (LTE) as a micro-grid grid laboratory activity, where academic and industrial communication infrastructure. partners from six European countries have joined forces to create a large-scale pan-European smart grid lab. Within the EIT ICT Labs SES, and motivated by ongo- I. Introduction ing smart grid pilot research within the Stockholm Royal With the recent technological advancements in com- Seaport project, partners from industry and academia munication infrastructures, mobile and cloud computing, have combined resources to develop a virtual laboratory smart devices, and power electronics, a renewed interest in for testing ICT infrastructures within the micro-grid. -
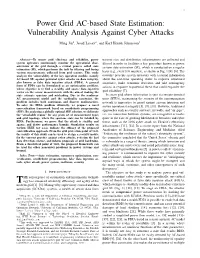
Vulnerability Analysis Against Cyber Attacks
1 Power Grid AC-based State Estimation: Vulnerability Analysis Against Cyber Attacks Ming Jin1, Javad Lavaei2, and Karl Henrik Johansson3 Abstract—To ensure grid efficiency and reliability, power transmission and distribution infrastructures are collected and system operators continuously monitor the operational char- filtered in order to facilitate a key procedure known as power acteristics of the grid through a critical process called state system state estimation (SE), which is conducted on a regular estimation (SE), which performs the task by filtering and fusing various measurements collected from grid sensors. This study basis (e.g., every few minutes), as shown in Fig. 1 [4]–[6]. The analyzes the vulnerability of the key operation module, namely outcome presents system operators with essential information AC-based SE, against potential cyber attacks on data integrity, about the real-time operating status to improve situational also known as false data injection attack (FDIA). A general awareness, make economic decisions, and take contingency form of FDIA can be formulated as an optimization problem, actions in response to potential threat that could engander the whose objective is to find a stealthy and sparse data injection vector on the sensor measurements with the aim of making the grid reliability [7]. state estimate spurious and misleading. Due to the nonlinear In smart grid where information is sent via remote terminal AC measurement model and the cardinality constraint, the units (RTUs), maintaining the security of the communication problem includes both continuous and discrete nonlinearities. network is imperative to guard against system intrusion and To solve the FDIA problem efficiently, we propose a novel ensure operational integrity [5], [9], [10]. -
Automatic Control 1997
Activity Report Automatic Control 1997 Department of Automatic Control Lund Institute of Technology Mailing address Department of Automatic Control Lund Institute of Technology Box 118 SE –221 00 LUND SWEDEN Visiting address Institutionen för Reglerteknik Lunds Tekniska Högskola Ole Römers väg 1, Lund Telephone Nat 046 –222 87 80 Int +46 46 222 87 80 Fax Nat 046 –13 81 18 Int +46 46 13 81 18 Generic email address [email protected] WWW and Anonymous FTP http://www.control.lth.se ftp://ftp.control.lth.se/pub The report is edited by Eva Dagnegård and Per Hagander Printed in Sweden Reprocentralen, Lunds Universitet, February 1998 Contents 1. Introduction 5 2. Internet Services 9 3. Economy and Facilities 12 4. Education 15 5. Research 21 6. External Contacts 44 7. Looking Back on Real-Time Systems 47 8. Dissertations 58 9. Honors and Awards 63 10. Personnel and Visitors 64 11. Staff Activities 69 12. Publications 82 13. Reports 90 14. Lectures by the Staff outside the Department 95 15. Seminars at the Department 105 3 4 1. Introduction This report covers the activities at the Department of Automatic Control at Lund Institute of Technology (LTH) from January 1 to December 31, 1997. The budget for 1997 was 23 MSEK, which is a slight increase compared to last year. The proportion coming from the University is reduced from 53% last year to 43% this year. One PhD thesis by Karl Henrik Johansson were defended, which brings the total number of PhDs graduating from our department to 48. Three Lic Tech theses by Lennart Andersson, Johan Eker, and Charlotta Johnsson were completed.