Conical Pendulum – Linearization Analyses
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 7. the Principle of Least Action
Chapter 7. The Principle of Least Action 7.1 Force Methods vs. Energy Methods We have so far studied two distinct ways of analyzing physics problems: force methods, basically consisting of the application of Newton’s Laws, and energy methods, consisting of the application of the principle of conservation of energy (the conservations of linear and angular momenta can also be considered as part of this). Both have their advantages and disadvantages. More precisely, energy methods often involve scalar quantities (e.g., work, kinetic energy, and potential energy) and are thus easier to handle than forces, which are vectorial in nature. However, forces tell us more. The simple example of a particle subjected to the earth’s gravitation field will clearly illustrate this. We know that when a particle moves from position y0 to y in the earth’s gravitational field, the conservation of energy tells us that ΔK + ΔUgrav = 0 (7.1) 1 2 2 m v − v0 + mg(y − y0 ) = 0, 2 ( ) which implies that the final speed of the particle, of mass m , is 2 v = v0 + 2g(y0 − y). (7.2) Although we know the final speed v of the particle, given its initial speed v0 and the initial and final positions y0 and y , we do not know how its position and velocity (and its speed) evolve with time. On the other hand, if we apply Newton’s Second Law, then we write −mgey = maey dv (7.3) = m e . dt y This equation is easily manipulated to yield t v = dv ∫t0 t = − gdτ + v0 (7.4) ∫t0 = −g(t − t0 ) + v0 , - 138 - where v0 is the initial velocity (it appears in equation (7.4) as a constant of integration). -

Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda
Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda • Introduction to the elastic pendulum problem • Derivations of the equations of motion • Real-life examples of an elastic pendulum • Trivial cases & equilibrium states • MATLAB models The Elastic Problem (Simple Harmonic Motion) 푑2푥 푑2푥 푘 • 퐹 = 푚 = −푘푥 = − 푥 푛푒푡 푑푡2 푑푡2 푚 • Solve this differential equation to find 푥 푡 = 푐1 cos 휔푡 + 푐2 sin 휔푡 = 퐴푐표푠(휔푡 − 휑) • With velocity and acceleration 푣 푡 = −퐴휔 sin 휔푡 + 휑 푎 푡 = −퐴휔2cos(휔푡 + 휑) • Total energy of the system 퐸 = 퐾 푡 + 푈 푡 1 1 1 = 푚푣푡2 + 푘푥2 = 푘퐴2 2 2 2 The Pendulum Problem (with some assumptions) • With position vector of point mass 푥 = 푙 푠푖푛휃푖 − 푐표푠휃푗 , define 푟 such that 푥 = 푙푟 and 휃 = 푐표푠휃푖 + 푠푖푛휃푗 • Find the first and second derivatives of the position vector: 푑푥 푑휃 = 푙 휃 푑푡 푑푡 2 푑2푥 푑2휃 푑휃 = 푙 휃 − 푙 푟 푑푡2 푑푡2 푑푡 • From Newton’s Law, (neglecting frictional force) 푑2푥 푚 = 퐹 + 퐹 푑푡2 푔 푡 The Pendulum Problem (with some assumptions) Defining force of gravity as 퐹푔 = −푚푔푗 = 푚푔푐표푠휃푟 − 푚푔푠푖푛휃휃 and tension of the string as 퐹푡 = −푇푟 : 2 푑휃 −푚푙 = 푚푔푐표푠휃 − 푇 푑푡 푑2휃 푚푙 = −푚푔푠푖푛휃 푑푡2 Define 휔0 = 푔/푙 to find the solution: 푑2휃 푔 = − 푠푖푛휃 = −휔2푠푖푛휃 푑푡2 푙 0 Derivation of Equations of Motion • m = pendulum mass • mspring = spring mass • l = unstreatched spring length • k = spring constant • g = acceleration due to gravity • Ft = pre-tension of spring 푚푔−퐹 • r = static spring stretch, 푟 = 푡 s 푠 푘 • rd = dynamic spring stretch • r = total spring stretch 푟푠 + 푟푑 Derivation of Equations of Motion -

Measuring Earth's Gravitational Constant with a Pendulum
Measuring Earth’s Gravitational Constant with a Pendulum Philippe Lewalle, Tony Dimino PHY 141 Lab TA, Fall 2014, Prof. Frank Wolfs University of Rochester November 30, 2014 Abstract In this lab we aim to calculate Earth’s gravitational constant by measuring the period of a pendulum. We obtain a value of 9.79 ± 0.02m/s2. This measurement agrees with the accepted value of g = 9.81m/s2 to within the precision limits of our procedure. Limitations of the techniques and assumptions used to calculate these values are discussed. The pedagogical context of this example report for PHY 141 is also discussed in the final remarks. 1 Theory The gravitational acceleration g near the surface of the Earth is known to be approximately constant, disregarding small effects due to geological variations and altitude shifts. We aim to measure the value of that acceleration in our lab, by observing the motion of a pendulum, whose motion depends both on g and the length L of the pendulum. It is a well known result that a pendulum consisting of a point mass and attached to a massless rod of length L obeys the relationship shown in eq. (1), d2θ g = − sin θ, (1) dt2 L where θ is the angle from the vertical, as showng in Fig. 1. For small displacements (ie small θ), we make a small angle approximation such that sin θ ≈ θ, which yields eq. (2). d2θ g = − θ (2) dt2 L Eq. (2) admits sinusoidal solutions with an angular frequency ω. We relate this to the period T of oscillation, to obtain an expression for g in terms of the period and length of the pendulum, shown in eq. -

Conservation of Linear Momentum: the Ballistic Pendulum
Conservation of Linear Momentum: the Ballistic Pendulum I. Discussion a. Determination of Velocity from Collision In the typical use made of a ballistic pendulum, a projectile, having a small mass, m, and a horizontal velocity, v, strikes and imbeds itself in a pendulum bob, having a large mass, M, and an initial horizontal velocity of zero. Immediately after the collision occurs the combined mass, M + m, of the bob and projectile has a small horizontal velocity, V. During this collision the conservation of linear momentum holds. If rotational effects are ignored, and if it is assumed that the time required for this event to take place is too short to allow the projectile to be substantially influenced by the earth's gravitational field, the motion remains horizontal, and mv = ( M + m ) V (1) After the collision has occurred, the combined mass, (M + m), rises along a circular arc to a vertical height h in the earth's gravitational field, as shown in Fig. l (c). During this portion of the motion, but not during the collision itself, the conservation of energy holds, if it is assumed that the effects of friction are negligible. Then, for motion along the arc, 1 2 ( M + m ) V = ( M + m) gh , or (2) 2 V = 2 gh (3) When V is eliminated using equations 1 and 3, the velocity of the projectile is v = M + m 2 gh (4) m b. Determination of Velocity from Range When a projectile, having an initial horizontal velocity, v, is fired from a height H above a plane, its horizontal range, R, is given by R = v t x o (5) and the height H is given by 1 2 H = gt (6) 2 where t = time during which projectile is in flight. -

Leonhard Euler - Wikipedia, the Free Encyclopedia Page 1 of 14
Leonhard Euler - Wikipedia, the free encyclopedia Page 1 of 14 Leonhard Euler From Wikipedia, the free encyclopedia Leonhard Euler ( German pronunciation: [l]; English Leonhard Euler approximation, "Oiler" [1] 15 April 1707 – 18 September 1783) was a pioneering Swiss mathematician and physicist. He made important discoveries in fields as diverse as infinitesimal calculus and graph theory. He also introduced much of the modern mathematical terminology and notation, particularly for mathematical analysis, such as the notion of a mathematical function.[2] He is also renowned for his work in mechanics, fluid dynamics, optics, and astronomy. Euler spent most of his adult life in St. Petersburg, Russia, and in Berlin, Prussia. He is considered to be the preeminent mathematician of the 18th century, and one of the greatest of all time. He is also one of the most prolific mathematicians ever; his collected works fill 60–80 quarto volumes. [3] A statement attributed to Pierre-Simon Laplace expresses Euler's influence on mathematics: "Read Euler, read Euler, he is our teacher in all things," which has also been translated as "Read Portrait by Emanuel Handmann 1756(?) Euler, read Euler, he is the master of us all." [4] Born 15 April 1707 Euler was featured on the sixth series of the Swiss 10- Basel, Switzerland franc banknote and on numerous Swiss, German, and Died Russian postage stamps. The asteroid 2002 Euler was 18 September 1783 (aged 76) named in his honor. He is also commemorated by the [OS: 7 September 1783] Lutheran Church on their Calendar of Saints on 24 St. Petersburg, Russia May – he was a devout Christian (and believer in Residence Prussia, Russia biblical inerrancy) who wrote apologetics and argued Switzerland [5] forcefully against the prominent atheists of his time. -

Exact Solution for the Nonlinear Pendulum (Solu¸C˜Aoexata Do Pˆendulon˜Aolinear)
Revista Brasileira de Ensino de F¶³sica, v. 29, n. 4, p. 645-648, (2007) www.sb¯sica.org.br Notas e Discuss~oes Exact solution for the nonlinear pendulum (Solu»c~aoexata do p^endulon~aolinear) A. Bel¶endez1, C. Pascual, D.I. M¶endez,T. Bel¶endezand C. Neipp Departamento de F¶³sica, Ingenier¶³ade Sistemas y Teor¶³ade la Se~nal,Universidad de Alicante, Alicante, Spain Recebido em 30/7/2007; Aceito em 28/8/2007 This paper deals with the nonlinear oscillation of a simple pendulum and presents not only the exact formula for the period but also the exact expression of the angular displacement as a function of the time, the amplitude of oscillations and the angular frequency for small oscillations. This angular displacement is written in terms of the Jacobi elliptic function sn(u;m) using the following initial conditions: the initial angular displacement is di®erent from zero while the initial angular velocity is zero. The angular displacements are plotted using Mathematica, an available symbolic computer program that allows us to plot easily the function obtained. As we will see, even for amplitudes as high as 0.75¼ (135±) it is possible to use the expression for the angular displacement, but considering the exact expression for the angular frequency ! in terms of the complete elliptic integral of the ¯rst kind. We can conclude that for amplitudes lower than 135o the periodic motion exhibited by a simple pendulum is practically harmonic but its oscillations are not isochronous (the period is a function of the initial amplitude). -

B3 Momentum Key Question: How Well Is Momentum Conserved in Collisions?
INVESTIGATION B3 Collaborative Learning This investigation is Exploros-enabled for tablets. See page xiii for details. B3 Momentum Key Question: How well is momentum conserved in collisions? The law of conservation of momentum is the second of Materials for each group the great conservation laws in physics, after the law of y Colliding pendulum kit conservation of energy. In this investigation, students observe elastic collisions between balls of the same and y Physics stand* differing masses. The speed of each ball before and after y Two photogates* each collision is determined, and the total momentum y DataCollector* before and after each collision is calculated. Students y Calculator* compare the total momentum before and after each collision to determine how well momentum is conserved. y Balance or digital scale, accurate to 1 gram (for the class)* Learning Goals *provided by the teacher ✔ Perform elastic collisions between balls of various masses. Online Resources Available at curiosityplace.com ✔ Calculate the velocity and momentum of the balls before and after each collision. y Equipment Video: Colliding Pendulum y Skill and Practice Sheets ✔ Determine whether momentum is conserved in each collision. y Whiteboard Resources y Animation: Changes in Momentum GETTING STARTED y Science Content Video: Newton’s Third Law y Student Reading: Newton’s Third Law and Momentum Time 100 minutes Setup and Materials 1. Make copies of investigation sheets for students. 2. Watch the equipment video. 3. Review all safety procedures with students. NGSS Connection This investigation builds conceptual understanding and skills for the following performance expectation. HS-PS2-2. Use mathematical representations to support the claim that the total momentum of a system of objects is conserved when there is no net force on the system. -

Leonhard Euler's Elastic Curves Author(S): W
Leonhard Euler's Elastic Curves Author(s): W. A. Oldfather, C. A. Ellis and Donald M. Brown Source: Isis, Vol. 20, No. 1 (Nov., 1933), pp. 72-160 Published by: The University of Chicago Press on behalf of The History of Science Society Stable URL: http://www.jstor.org/stable/224885 Accessed: 10-07-2015 18:15 UTC Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at http://www.jstor.org/page/ info/about/policies/terms.jsp JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms of scholarship. For more information about JSTOR, please contact [email protected]. The University of Chicago Press and The History of Science Society are collaborating with JSTOR to digitize, preserve and extend access to Isis. http://www.jstor.org This content downloaded from 128.138.65.63 on Fri, 10 Jul 2015 18:15:50 UTC All use subject to JSTOR Terms and Conditions LeonhardEuler's ElasticCurves (De Curvis Elasticis, Additamentum I to his Methodus Inveniendi Lineas Curvas Maximi Minimive Proprietate Gaudentes, Lausanne and Geneva, 1744). Translated and Annotated by W. A. OLDFATHER, C. A. ELLIS, and D. M. BROWN PREFACE In the fall of I920 Mr. CHARLES A. ELLIS, at that time Professor of Structural Engineering in the University of Illinois, called my attention to the famous appendix on elastic curves by LEONHARD EULER, which he felt might well be made available in an English translationto those students of structuralengineering who were interested in the classical treatises which constitute landmarks in the history of this ever increasingly important branch of scientific and technical achievement. -

Pendulum.Pdf
previous index next The Pendulum Michael Fowler The Simple Pendulum Galileo was the first to record that the period of a swinging lamp high in a cathedral was independent of the amplitude of the oscillations, at least for the small amplitudes he could observe. In 1657, Huygens constructed the first pendulum clock, a vast improvement in timekeeping over all previous techniques. So the pendulum was the first oscillator of real technological importance. Simple pendulum: a mass m at the end of a rigid light rod of length l, constrained to rotate in a vertical plane. mg sin mg cos In fact, though, the pendulum is not quite a simple harmonic oscillator: the period does depend on the amplitude, but provided the angular amplitude is kept small, this is a small effect. The weight mg of the bob (the mass at the end of the light rod) can be written in terms of components parallel and perpendicular to the rod. The component parallel to the rod balances the tension in the rod. The component perpendicular to the rod accelerates the bob, d 2 ml mg sin . dt 2 The mass cancels between the two sides, pendulums of different masses having the same length behave identically. (In fact, this was one of the first tests that inertial mass and gravitational mass are indeed equal: pendulums made of different materials, but the same length, had the same period.) 2 For small angles, the equation is close to that for a simple harmonic oscillator, d 2 lg , dt 2 with frequency gl/ , that is, time of one oscillation T 2 l / g . -
Measuring the Mass of the Earth Using a Simple Pendulum
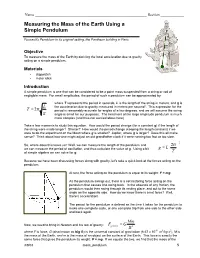
Name _________________________________________________________ Section ____________ Measuring the Mass of the Earth Using a Simple Pendulum Foucault's Pendulum in its original setting, the Pantheon building in Paris Objective To measure the mass of the Earth by deriving the local acceleration due to gravity acting on a simple pendulum. Materials • stopwatch • meter stick Introduction A simple pendulum is one that can be considered to be a point mass suspended from a string or rod of negligible mass. For small amplitudes, the period of such a pendulum can be approximated by: where T represents the period in seconds, L is the length of the string in meters, and g is 2 = π L the acceleration due to gravity measured in meters per second . This expression for the T 2 period is reasonably accurate for angles of a few degrees, and we will assume the swing g angle is small for our purposes. The treatment of the large amplitude pendulum is much more complex (and thus not worried about here). Take a few moments to study this equation. How would the period change (for a constant g) if the length of the string were made longer? Shorter? How would the period change (keeping the length constant) if we were to do the experiment on the Moon where g is smaller? Jupiter, where g is larger? Does this all make sense? Think about how one might adjust an old grandfather clock if it were running too fast or too slow. π 2 So, where does this leave us? Well, we can measure the length of the pendulum and = 2 we can measure the period of oscillation, and thus calculate the value of g. -
The Dynamics of the Elastic Pendulum
MATH MODELING MIDTERM REPORT MATH 485, Instructor: Dr. Ildar Gabitov, Mentor: Joseph Gibney THE DYNAMICS OF THE ELASTIC PENDULUM A group project proposal with preliminary research by Corey Zammit, Nirantha Balagopal, Zijun Li, Shenghao Xia, and Qisong Xiao 1. An Introduction to the System Considered The system of the elastic pendulum consists of a spring, connected to a pivot, suspending a mass. This spring can have many different properties among these are stiffness which can be considered a constant in some practical cases, so the spring has a linear reaction force when extended and compressed. Typically a spring that one would find in real-life applications is either an extension spring or a compression spring (and this will be discussed in greater detail in section 5) however for simplified models and preliminary research we find it practical to consider the case where this spring behaves in a Hookian manor in both extension and compression. This assumption, however, does beg this question among others: Does the spring bend as shown in Figure 1 when compressed ever, and how would this effect the behavior of the system? One way to answer this question is to acknowledge that assumptions such as the ones that follow need to be made to analyze this system, and in any case, behaviors such as these are not easy to analyze and would involve making many more assumptions that could be equally unsatisfying. We will be considering two regimes of this system in our preliminary research with the same assumptions and will pose questions for further research with suggestions for different assumptions. -
Least Action Principle Applied to a Non-Linear Damped Pendulum Katherine Rhodes Montclair State University
Montclair State University Montclair State University Digital Commons Theses, Dissertations and Culminating Projects 1-2019 Least Action Principle Applied to a Non-Linear Damped Pendulum Katherine Rhodes Montclair State University Follow this and additional works at: https://digitalcommons.montclair.edu/etd Part of the Applied Mathematics Commons Recommended Citation Rhodes, Katherine, "Least Action Principle Applied to a Non-Linear Damped Pendulum" (2019). Theses, Dissertations and Culminating Projects. 229. https://digitalcommons.montclair.edu/etd/229 This Thesis is brought to you for free and open access by Montclair State University Digital Commons. It has been accepted for inclusion in Theses, Dissertations and Culminating Projects by an authorized administrator of Montclair State University Digital Commons. For more information, please contact [email protected]. Abstract The principle of least action is a variational principle that states an object will always take the path of least action as compared to any other conceivable path. This principle can be used to derive the equations of motion of many systems, and therefore provides a unifying equation that has been applied in many fields of physics and mathematics. Hamilton’s formulation of the principle of least action typically only accounts for conservative forces, but can be reformulated to include non-conservative forces such as friction. However, it can be shown that with large values of damping, the object will no longer take the path of least action. Through numerical