KINETAIR: INTERACTIVE STAIRS with MULTIPLE FUNCTIONS 371 the Fabrication Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Building an Adu
BUILDING AN ADU GUIDE TO ACCESSORY DWELLING UNITS 1 451 S. State Street, Room 406 Salt Lake City, UT 84114 - 5480 P.O. Box 145480 CONTENT 04 OVERVIEW 08 ELIGIBILITY 11 BUILDING AN ADU Types of ADU Configurations 14 ATTACHED ADUs Existing Space Conversion // Basement Conversion // This handbook provides general Home with Attached Garage // Addition to House Exterior guidelines for property owners 21 DETACHED ADUs Detached Unit // Detached Garage Conversion // who want to add an ADU to a Attached Above Garage // Attached to Existing Garage lot that already has an existing single-family home. However, it 30 PROCESS is recommended to work with a 35 FAQ City Planner to help you answer any questions and coordinate 37 GLOSSARY your application. 39 RESOURCES ADU regulations can change, www.slc.gov/planning visit our website to ensure latest version 1.1 // 05.2020 version of the guide. 2 3 OVERVIEW WHAT IS AN ADU? An accessory dwelling unit (ADU) is a complete secondary residential unit that can be added to a single-family residential lot. ADUs can be attached to or part of the primary residence, or be detached as a WHERE ARE WE? separate building in a backyard or a garage conversion. Utah is facing a housing shortage, with more An ADU provides completely separate living space people looking for a place to live than there are homes. including a kitchen, bathroom, and its own entryway. Low unemployment and an increasing population are driving a demand for housing. Growing SLC is the City’s adopted housing plan and is aimed at reducing the gap between supply and demand. -

Movement on Stairs During Building Evacuations
NIST Technical Note 1839 Movement on Stairs During Building Evacuations Erica D. Kuligowski Richard D. Peacock Paul A. Reneke Emily Wiess Charles R. Hagwood Kristopher J. Overholt Rena P. Elkin Jason D. Averill Enrico Ronchi Bryan L. Hoskins Michael Spearpoint This publication is available free of charge from: http://dx.doi.org/10.6028/NIST.TN.1839 NIST Technical Note 1839 Movement on Stairs During Building Evacuations Erica D. Kuligowski Richard D. Peacock Paul A. Reneke Emily Wiess Kristopher J. Overholt Rena P. Elkin Jason D. Averill Fire Research Division Engineering Laboratory Charles R. Hagwood Statistical Engineering Division Information Technology Laboratory Enrico Ronchi Lund University Lund, Sweden Bryan L. Hoskins Oklahoma State University Stillwater, OK Michael Spearpoint University of Canterbury Christchurch, New Zealand This publication is available free of charge from http://dx.doi.org/10.6028/NIST.TN.1839 January 2015 U.S. Department of Commerce Penny Pritzker, Secretary National Institute of Standards and Technology Willie May, Acting Under Secretary of Commerce for Standards and Technology and Acting Director Certain commercial entities, equipment, or materials may be identified in this document in order to describe an experimental procedure or concept adequately. Such identification is not intended to imply recommendation or endorsement by the National Institute of Standards and Technology, nor is it intended to imply that the entities, materials, or equipment are necessarily the best available for the purpose. National Institute of Standards and Technology Technical Note 1839 Natl. Inst. Stand. Technol. Tech. Note 1839, 213 pages (January 2015) This publication is available free of charge from: http://dx.doi.org/10.6028/NIST.TN.1839 CODEN: NTNOEF Abstract The time that it takes an occupant population to reach safety when descending a stair during building evacuations is typically estimated by measureable engineering variables such as stair geometry, speed, stair density, and pre-observation delay. -

Safety on Stairs
d Div. 100 ! i I 1 ' L BS BUILDING SCIENCE SERIES 108 afety on Stairs S DEPARTMENT OF COMMERCE • NATIONAL BUREAU OF STANDARDS NATIONAL BUREAU OF STANDARDS The National Bureau of Standards' was established by an act of Congress March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides: (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to promote pubUc safety. The Bureau's technical work is performed by the National Measurement Laboratory, the National Engineering Laboratory, and the Institute for Computer Sciences and Technology. THE NATIONAL MEASUREMENT LABORATORY provides the national system of physical and chemical and materials measurement; coordinates the system with measurement systems of other nations and furnishes essential services leading to accurate and uniform physical and chemical measurement throughout the Nation's scientific community, industry, and commerce; conducts materials research leading to improved methods of measurement, standards, and data on the properties of materials needed by industry, commerce, educational institutions, and Government; provides advisory and research services to other Government Agencies; develops, produces, and distributes Standard Reference Materials; and provides calibration services. -

Functional Requirements of Good Stair Case
UNIT I ARCHITECTURAL ENGINEERING Stairs - Materials - Terms Used - Types of Stairs - Functional Requirements of Good Stair Case - Layout of Stair Case Planning - Introduction to Ramps, Lifts, Escalators - Heat Transfer - Insulating Materials - Method of Applications - Acoustics Sound Insulations - General Principles - Sound Absorbing Materials - Acoustical Design of Auditorium - Class Rooms – Library- Sound Insulation of Walls and Floors - Ventilation - Requirements - Types of Ventilations - Air Conditioning - Fire Resisting Construction Materials - Guidelines for Fire Resisting Buildings - Fire Protection. STAIRS Staircase is an important component of a building providing us the access to different floors and roof of the building. It consists of a flight of steps (stairs) and one or more intermediate landing slabs between the floor levels. Different types of staircases can be made by arranging stairs and landing slabs. Stairs can be made of concrete, stone, wood, steel or combination of any of these. Primary functions of staircase • Provide an access from one floor to another. • Provide a safe means of travel between floors. • Provide an easy mean of travel between floors. • Provide a suitable means of escape in case of fire. • Provide a mean of conveying fittings and furniture between floor levels. General terminologies used in Staircase 1. Steps - A series of horizontal open treads with a space between the treads with a space between the treads or as enclosed steps with a vertical face between the treads as shown in the figure below. • Tread – horizontal surface of a step • Riser – vertical surface or near vertical of a step 2. Nosing - In some cases the tread is projected outward to increase the space. -
Additional Code Requirements
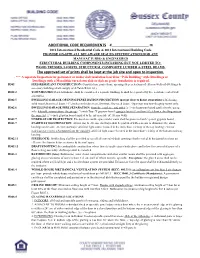
ADDITIONAL CODE REQUIREMENTS #___________________ m 2012 International Residential Code & 2012 International Building Code PROVIDE ON-SITE ALL DELAWARE SEALED SPECIFICATIONS FOR ANY MANUFACTURED & ENGINEERED STRUCTURAL BUILDING COMPONENTS INCLUDING BUT NOT LIMITED TO: WOOD TRUSSES, I-JOISTS, STRUCTURAL COMPOSITE LUMBER & STEEL BEAMS. The approved set of prints shall be kept at the job site and open to inspection. *** A separate Inspection for perimeter or under slab insulation board for “Pole Building” style Dwellings or Dwellings with a Monolithic turn down slab or slab on grade foundation is required. R302 FIRE-RESISTANT CONSTRUCTION: Construction, projections, openings & penetrations of exterior walls of dwellings & accessory buildings shall comply with Table R302.1(1). R302.2 TOWNHOUSES: Each townhouse shall be considered a separate building & shall be separated by fire-resistance-rated wall assemblies. R302.5 DWELLING/GARAGE OPENING/PENETRATION PROTECTION (garage door to house separation):self-closing, 3 solid wood doors/steel doors ≥1 /8 inches in thickness or 20-minute fire-rated doors. Openings into non-sleeping rooms only. 1 R302.6 DWELLING/GARAGE FIRE SEPARATION: from the residence and attics: ≥ /2-inch gypsum board applied to the garage 5 side; habitable rooms above the garage: /8-inch Type X gypsum board; garages located less than 3 feet from a dwelling unit on 1 the same lot: ≥ /2-inch gypsum board applied to the interior side of exterior walls 1 R302.7 UNDER-STAIR PROTECTION: Enclosed accessible space under stairs shall be protected with /2-inch gypsum board. R303.7 STAIRWAY ILLUMINATION: All interior & exterior stairways shall be provided with a means to illuminate the stairs, landings and treads; exterior stairways: artificial light source located in the immediate vicinity of the top landing; exterior stairways (access to a basement from the outside): artificial light source located in the immediate vicinity of the bottom stairway landing. -

Types of Stairs
Types of Stairs Straight stairs are certainly one of the most common types of stairs found in both residential and commercial properties. Examples of Straight Stairs: L Shaped Stair (or sometimes called quarter turn stairs) The L shaped stair is a variation of the straight stair with a bend in some portion of the stair. This bend is usually achieved by adding a landing at the bend transition point. The bend is often 90 degrees, however it does not have to be. If the landing is closer to the top or bottom of the stairs it is sometimes referred to as a long L stair. Example of L Shaped Stairs: U shaped Stairs (or sometimes called half turn stairs or switchback stairs) U Shaped stairs are basically 2 parallel flights of straight stairs joined by a landing that requires 180 degree turn in the walk line. If a third flight is inserted into the middle of the stairs, it would become a double L stair (or quarter landing). Example of U Shaped Stairs: Quarter Landing Stairs Examples of Quarter Landing Stairs: Winder Stairs Winder stairs are a variation of an L shaped stair but instead of a flat landing, they have pie shaped or triangular steps at the corner transition. Examples of Winder Stairs: Spiral Stairs Spiral stairs are a often confused with curved stairs. Although, both types of stairs follow a helical arc (like the shape of a spring), spiral stairs usually are made very compact and the treads radiate around a center pole. Example of Spiral Stairs: Curved Stairs Curved stairs add elegance to home or business. -

Interim Guidance for Office-Based Work During the Covid-19 Public Health Emergency
INTERIM GUIDANCE FOR OFFICE-BASED WORK DURING THE COVID-19 PUBLIC HEALTH EMERGENCY When you have read this document, you can affirm at the bottom. As of June 8, 2021 Purpose This Interim Guidance for Office-Based Work during the COVID-19 Public Health Emergency (“Interim COVID-19 Guidance for Office-Based Work”) was created to provide businesses and entities that operate in office spaces and their employees and contractors with precautions to help protect against the spread of COVID-19 as their businesses reopen or continue to operate. This guidance addresses business activities where the core function takes place within an office setting. This guidance may apply – but is not limited – to businesses and entities in the following sectors: Professional services, nonprofit, technology, administrative support, and higher education administration (excluding full campus reopening). Please note that these guidelines may also apply to business operating parts of their business functions under different guidelines (e.g. front office for a construction company). This guidance does not address medical offices, such as doctors’ offices or dentists’ offices. This guidance also does not address building owners/managers and their employees or contractors. For more information on building management, see, “Interim COVID-19 Guidance for Commercial Building Management.” Owners and operators of offices are authorized to require masks and six feet of social distancing for employees within their establishments or adhere to DOH guidance, consistent with the Centers for Disease Control and Prevention’s (CDC) “Interim Public Health Recommendations for Fully Vaccinated People.” If choosing to adhere to CDC guidance, offices generally do not congregate patrons or operate above the State’s social gathering limits, and must follow applicable guidelines for masks, distancing, and capacity as outlined in New York State’s guidelines on Implementing CDC Guidance. -

Accessible Means of Egress
U.S. A CCESS B O A R D T E C H N I C A L G UIDE Accessible Means of Egress This guide explains requirements in the ADA Standards and referenced sections of the International Building Code (IBC) and was developed in cooperation with the International Code Council. Required Compliance with the IBC [§207] Accessible means of egress must be provided according to the International Building Code (IBC). Issued by the International Code Council (ICC), the IBC addresses the number of means of egress required and technical criteria for them, including fire– resistance rating, smoke protection, travel distance, width, and other features. The Standards currently apply the IBC 2003 edition or the 2000 edition and 2001 supplement. The Access Board plans to update these references. Compliance with a later edition may be possible under the provision for “equivalent Further information on the facilitation” (§103) if it is comparable to, or stricter than, the IBC is available from the, referenced editions. International Code Council (ICC) at (888) 422-7233) or www.iccsafe.org. Means of Egress A means of egress is an unobstructed path to leave buildings, structures, and spaces. A means of egress is comprised of exit access, exit, and exit discharge. Components of a Means of Egress Exit Access The path from any location in a building to an exit Exits Doors to the outside, enclosed exit stairways, and horizontal exits Exit Discharge The path from an exit to a public way such as a street or alley Chapter 4: Accessible Routes Accessible Means of Egress Required Means of Egress [IBC §1007.1 (2003), §1003.2.13 (2000)] The IBC requires at least two means of egress from all spaces and buildings with few exceptions. -

Residential Square Footage Guidelines
R e s i d e n t i a l S q u a r e F o o t a g e G u i d e l i n e s North Carolina Real Estate Commission North Carolina Real Estate Commission P.O. Box 17100 • Raleigh, North Carolina 27619-7100 Phone 919/875-3700 • Web Site: www.ncrec.gov Illustrations by David Hall Associates, Inc. Copyright © 1999 by North Carolina Real Estate Commission. All rights reserved. 7,500 copies of this public document were printed at a cost of $.000 per copy. • REC 3.40 11/1/2013 Introduction It is often said that the three most important factors in making a home buying decision are “location,” “location,” and “location.” Other than “location,” the single most-important factor is probably the size or “square footage” of the home. Not only is it an indicator of whether a particular home will meet a homebuyer’s space needs, but it also affords a convenient (though not always accurate) method for the buyer to estimate the value of the home and compare it to other properties. Although real estate agents are not required by the Real Estate License Law or Real Estate Commission rules to report the square footage of properties offered for sale (or rent), when they do report square footage, it is essential that the information they give prospective purchasers (or tenants) be accurate. At a minimum, information concerning square footage should include the amount of living area in the dwelling. The following guidelines and accompanying illustrations are designed to assist real estate brokers in measuring, calculating and reporting (both orally and in writing) the living area contained in detached and attached single-family residential buildings. -
Stairs & Railings
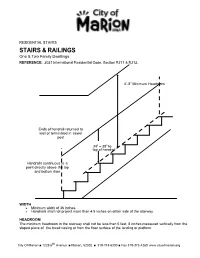
RESIDENTIAL STAIRS STAIRS & RAILINGS One & Two Family Dwellings REFERENCE: 2021 International Residential Code, Section R311 & R312. 6’-8” Minimum Headroom Ends of handrail returned to wall or terminated in newel post 34” – 38” to top of handrail Handrails continuous to a point directly above the top and bottom riser WIDTH Minimum width of 36 inches. Handrails shall not project more than 4.5 inches on either side of the stairway. HEADROOM The minimum headroom in the stairway shall not be less than 6 feet, 8 inches measured vertically from the sloped plane of the tread nosing or from the floor surface of the landing or platform. City Of Marion ■ 1225 6th Avenue ■ Marion, 52302 ■ 319-743-6330 ■ Fax 319-373-4260 www.cityofmarion.org HANDRAILS A handrail is required on at least one side of stairways. It shall be continuous the full length of the flight of stairs with four or more risers from a point directly above the top riser of a flight to a point directly above the lowest riser of the flight. Ends shall be returned to the wall or terminate in newel posts or safety terminals. Handrail height shall be between 34 and 38 inches measured from the nosing of the tread. The handgrip portion of handrails shall have a circular cross section of 1 ¼” minimum to 2” maximum. Other shapes that provide an equivalent grasping surface are permissible. Edges are to have a min. radius of 1/8”. RESIDENTIAL STAIRS TREAD DETAIL One & Two Family Dwellings Minimum 10” Nosing Required Min. 3/4" Max. 1 1/4” 7 Maximum radius 9/16” Maximum (Nosing is not required if tread depth is 11” or greater.) TREADS & RISERS Maximum riser is 7-3/4” and the minimum tread depth is 10”. -

UDC Dimensional Standards (PDF)
UDC Dimensional Standards This document includes basic information regarding lot dimensions, setback and other lot standards. For full, up-to-date, information, you may wish to refer to the Unified Development Code (NCC Code, Chapter 40) Article 4 available online at: http://czo.nccde.org/ This Section contains the basic district standards applicable to all uses. Table 40.04.110 contains intensity, lot, bulk and exterior storage standards. These standards may be modified by the Department pursuant to Article 26. A. Minimum open space ratio. For residential subdivisions of five (5) lots or less open space shall not be required. Protected resource land shall be preserved by conservation easements. For major land development plans, all protected resources shall be in open space and none shall be permitted on any residential lots. B. Minimum site area. Minimum site area is the minimum area required before any new uses recognized by this Chapter may be permitted in the zoning district. No land shall be rezoned unless the proposed zoning district meets minimum site area requirements. In determining minimum site area requirements, contiguous parcels of the same zoning shall be considered in the calculation. C. Maximum building height. If there are single-family detached or single-family attached dwellings within one hundred (100) feet of a property line of the parcel to be developed with a building over fifty (50) feet, the required front, street, side or rear yards adjacent to those dwellings shall be at a minimum equal to the height of the proposed building. D. Minimum lot area. The minimum lot area requirement must be met exclusive of protected resources, and for lots less than one (1) acre, exclusive of required bufferyards. -

Introducing the MS Seaventure
OUR SHIP Introducing the MS Seaventure Enhanced Features for a Better Small Ship Experience MS Seaventure features a 1-A Super ice class rating — the highest ice class awarded to passenger vessels. She can explore places that ships with a lesser ice class simply can’t. The ship also offers a host of new amenities, including a sauna, fitness center, custom- built citizen science lab, and heated saltwater pool. Increased storage space allows us to carry more adventure equipment, permitting more of our guests to participate in activities like kayaking and camping. Large beautifully appointed common areas let guests spread out and relax, and the addition of a second kitchen offers more dining options, including al fresco dining when weather permits. Come explore with us in comfort & style! 30 | 1-800-862-4140 OUR SHIP Impeccable Amenities SERVICES • Complimentary 2-night stay at the Arakur Resort & Spa • Complimentary Alcoholic and Non-Alcoholic Beverages on board • Complimentary 200 MB of Internet Access for your Personal Device • Certified Emergency Physician and Clinic • World Class Cuisine and Live Music on board • Voyage Photo Coach • Dedicated Passenger Service Manager • Complimentary Expedition Jacket SHIP FACILITIES • Two Elevators serving all passenger decks • Free Internet on Computers in the Library • Fitness Center and Sauna • Lounge with AV Facilities • Heated saltwater Swimming Pool • Citizen Science Laboratory • 24 hour Coffee/Tea station • Multiple Dining Areas & Kitchens POLAR-LATITUDES.COM | 31 ACCOMMODATIONS Accommodations All Suites Feature • Exterior views • Telephone • Nearly all suites can be configured with your choice of • En-suite temperature controls one queen or two twin beds. • Mini-Bar • Sitting area with sofa and/or side chairs • Bathroom with fine toiletries • Flat Screen TV • Hair dryer Owner's Suite 30.8 m2, 331 sq.