A Uniformization Theorem for Nested Word to Word Transductions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Rewriting Games on Nested Words
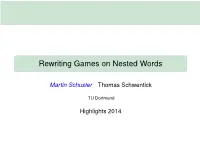
Rewriting Games on Nested Words Martin Schuster Thomas Schwentick TU Dortmund Highlights 2014 Context-Free Games On Strings: Intuition Basic idea: Context-free grammar as Example two-player game T “ tafba, aafafa, abafau, JULIET chooses function f Ñ af | b symbols af f a ROMEO chooses Ó replacement strings af afa Ó JULIET wins if a target abafa string is reached Algorithmic problem JWIN Given: A context-free game G and a string w Question: Does JULIET have a winning strategy on w in G? Previous Results (Some) results from [Muscholl, Schwentick, Segoufin 2006]: JWIN is undecidable in general ù Left-to-right (L2R) restriction With L2R restriction and DFA-represented target language, JWin is EXPTIME-complete for finite or (D/N)FA-represented regular replacement languages PTIME-complete for finite replacement languages and bounded recursion Application: Active XML Schema Rewriting Server Client City Ñ Name, Weather, Events City Ñ Name, Weather, Events Events Ñ @event_svc Events Ñ (Sports|Concert)* event_svc: Ñ (Sports|Concert)* Server (CC-BY-SA 3.0) RRZE Icons, Client (LGPL) Everaldo Coelho Goal: Rewrite server documents into client schema Milo et al., 2003: DTD schema languages ù Reduction to string rewriting ù Claimed PTIME algorithm for bounded recursion (?) Our interest: stronger schema languages (XML Schema) ù Main target: identify tractable restrictions ù cfGs on nested words Nested Words Idea: Correct nesting of tags over label alphabet Σ ù Linearisations of Σ-labelled forests Example a a xayx{ayxayxbyxcyx{cyx{byxayx{ayx{ay b a c Schema -

A Note on Nested Words
A Note on Nested Words Andreas Blass¤ Yuri Gurevichy Abstract For every regular language of nested words, the underlying strings form a context-free language, and every context-free language can be obtained in this way. Nested words and nested-word automata are gen- eralized to motley words and motley-word automata. Every motley- word automation is equivalent to a deterministic one. For every reg- ular language of motley words, the underlying strings form a ¯nite intersection of context-free languages, and every ¯nite intersection of context-free languages can be obtained in this way. 1 Introduction In [1], Rajeev Alur and P. Madhusudan introduced and studied nested words, nested-word automata and regular languages of nested words. A nested word is a string of letters endowed with a so-called nested relation. Alur and Madhusudan prove that every nested-word automaton is equivalent to a deterministic one. In Section 2, we recall some of their de¯nitions. We quote from the introduction to [1]. \The motivating application area for our results has been soft- ware veri¯cation. Given a sequential program P with stack-based control flow, the execution of P is modeled as a nested word with nesting edges from calls to returns. Speci¯cation of the program is given as a nested word automaton A, and veri¯cation corre- sponds to checking whether every nested word generated by P is ¤Math Dept, University of Michigan, Ann Arbor, MI 48109; [email protected] yMicrosoft Research, Redmond, WA 98052; [email protected] 1 accepted by A. Nested-word automata can express a variety of requirements such as stack-inspection properties, pre-post condi- tions, and interprocedural data-flow properties." In Section 3, we show that all context-free properties, and only context- free properties, can be captured by a nested-word automaton in the following precise sense. -

Equivalence of Deterministic Nested Word to Word Transducers
Equivalence of Deterministic Nested Word to Word Transducers S lawomir Staworko13 and Gr´egoireLaurence23 and Aur´elienLemay23 and Joachim Niehren13 1 INRIA, Lille 2 University of Lille 3 Mostrare project, INRIA & LIFL (CNRS UMR8022) Abstract. We study the equivalence problem of deterministic nested word to word transducers and show it to be surprisingly robust. Modulo polynomial time reductions, it can be identified with 4 equivalence prob- lems for diverse classes of deterministic non-copying order-preserving transducers. In particular, we present polynomial time back and fourth reductions to the morphism equivalence problem on context free lan- guages, which is known to be solvable in polynomial time. Keywords: trees, transducers, automata, context-free grammars, XML. 1 Introduction Nested word automata (nas) [1] are tree automata, that operate on linearizations of unranked trees in streaming manner. All nodes of the tree are visited twice, as usual in preorder traversals. At the first visit (opening event), a symbol is to be pushed onto a stack that is popped at the second visit (closing event). nas were introduced as a reformulation of visibly pushdown automata [2] and proved equivalent to pushdown forest automata [11] and streaming tree automata [6]. More formally, a nested word over Σ is a word of parenthesis in Σ^ = fop; clg × Σ, such that all opening parenthesis are properly closed. We consider nested words as linearizations of unranked trees. For instance, the linearization of a(b(c); d) is the nested word (op; a) · (op; b) · (op; c) · (cl; c) · (cl; b) · (op; d) · (cl; d) · (cl; a), or in XML notation <a><b><c></c></b><d></d></a>. -
A Uniformization Theorem for Nested Word to Word Transductions
A Uniformization Theorem for Nested Word to Word Transductions Dmitry Chistikov and Rupak Majumdar Max Planck Institute for Software Systems (MPI-SWS) Kaiserslautern and Saarbr¨ucken, Germany fdch,[email protected] Abstract. We study the class of relations implemented by nested word to word transducers (also known as visibly pushdown transducers). We show that any such relation can be uniformized by a functional rela- tion from the same class, implemented by an unambiguous transducer. We give an exponential upper bound on the state complexity of the uniformization, improving a previous doubly exponential upper bound. Our construction generalizes a classical construction by Sch¨utzenberger for the disambiguation of nondeterministic finite-state automata, using determinization and summarization constructions on nested word au- tomata. Besides theoretical interest, our procedure can be the basis for synthesis procedures for nested word to word transductions. Keywords: uniformization, transduction, nested word, visibly push- down language. 1 Introduction A central result in the theory of rational languages is the unambiguity theo- rem [1,2], which states that every rational function can be implemented by an unambiguous transducer, that is, a transducer that has at most one success- ful run on any input. Sch¨utzenberger [3] gave an elegant and direct proof of the unambiguity theorem, by showing, for any rational function, a matrix repre- sentation which can be made unambiguous. Sakarovitch [2] subsequently showed that the construction of Sch¨utzenberger can be used as the foundation for several results in the theory of rational functions, most notably the rational uniformiza- tion theorem and the rational cross-section theorem (see [4,5,2]). -

Synchronization of Deterministic Visibly Push-Down Automata
Synchronization of Deterministic Visibly Push-Down Automata Henning Fernau Universität Trier, Fachbereich IV, Informatikwissenschaften, Germany [email protected] Petra Wolf Universität Trier, Fachbereich IV, Informatikwissenschaften, Germany https://www.wolfp.net/ [email protected] Abstract We generalize the concept of synchronizing words for finite automata, which map all states of the automata to the same state, to deterministic visibly push-down automata. Here, a synchronizing word w does not only map all states to the same state but also fulfills some conditions on the stack content of each run after reading w. We consider three types of these stack constraints: after reading w, the stack (1) is empty in each run, (2) contains the same sequence of stack symbols in each run, or (3) contains an arbitrary sequence which is independent of the other runs. We show that in contrast to general deterministic push-down automata, it is decidable for deterministic visibly push-down automata whether there exists a synchronizing word with each of these stack constraints, more precisely, the problems are in EXPTIME. Under the constraint (1), the problem is even in P. For the sub-classes of deterministic very visibly push-down automata, the problem is in P for all three types of constraints. We further study variants of the synchronization problem where the number of turns in the stack height behavior caused by a synchronizing word is restricted, as well as the problem of synchronizing a variant of a sequential transducer, which shows some visibly behavior, by a word that synchronizes the states and produces the same output on all runs. -
Nested Word Automata
Department of Computer Science & Automation Indian Institute of Science Nested Word Automata Seminar Presentation 08 Dec 16 Dara Singh Vohra Jibin Surendran Ashok Rawat Nested Word Automata Overview Motivation and background Nested words and their acceptors Determinization proof Conclusion 1 / 30 Nested Word Automata Motivation and background Overview Motivation and background Common languages Visibly pushdown languages Nested words and their acceptors Determinization proof Conclusion 1 / 30 q0 c q q 1 r 2 Nested Word Automata Motivation and background Common languages Regular language 1 procedure foo () § ¤ 2 { 3 r e t u r n ; 4 } ¦ L1 = fc rg ¥ 2 / 30 Nested Word Automata Motivation and background Common languages Regular language 1 procedure foo () § ¤ 2 { q0 3 r e t u r n ; 4 } c ¦ L1 = fc rg ¥ q q 1 r 2 2 / 30 q0 q3 ?, c, ?A A, r, " A, r, " q1 q2 B, r, " A, c, AB A, r, " B, c, BB Nested Word Automata Motivation and background Common languages (det.) Context-free language 1 procedure bar () § ¤ 2 { 3 i f (*) 4 c a l l bar (); 5 r e t u r n ; 6 } n n ¦ L2 = fc r j n > 0g ¥ 3 / 30 Nested Word Automata Motivation and background Common languages (det.) Context-free language q0 q3 1 procedure bar () § ¤ 2 { 3 i f (*) ?, c, ?A A, r, " A, r, " 4 c a l l bar (); 5 r e t u r n ; q1 q2 6 } B, r, " L = fcn rn j n > 0g ¦ 2 ¥ A, c, AB A, r, " B, c, BB 3 / 30 / / / all standard properties not under intersection and complementation all standard problems intersection, inclusion, equivalence undecidable powerset construction not possible Question: -

Checking Compatibility of a Producer and a Consumer ∗ Evan Driscoll,† Amanda Burton,† and Thomas Reps†,‡ †University of Wisconsin ‡Grammatech, Inc
Checking Compatibility of a Producer and a Consumer ∗ Evan Driscoll,y Amanda Burton,y and Thomas Repsy;z yUniversity of Wisconsin zGrammaTech, Inc. fdriscoll, burtona, [email protected] Abstract technique is really a heuristic for bug-finding, not a technique for verifying producer-consumer compatibility. This paper addresses the problem of identifying incompatibilities We have implemented the method in a tool called PCCA between two programs that operate in a producer/consumer rela- (for Producer-Consumer Conformance Analyzer). Given the two tionship. It describes the techniques that are incorporated in a tool source programs, along with information about which functions called PCCA (Producer-Consumer Conformance Analyzer), which perform I/O (see x4.2), PCCA infers a description of the language attempts to (i) determine whether the consumer is prepared to ac- that the producer generates and a description of the language that cept all messages that the producer can emit, or (ii) find a counter- the consumer expects, and determines whether the former is a sub- example: a message that the producer can emit and the consumer set of the latter. will reject. PCCA starts out by producing a nested word automaton (NWA) [1] P for the producer, which accepts an over-approximation of 1. Introduction language that the producer emits. Similarly, PCCA produces an Complex systems today are made up of many communicating com- NWA C for the consumer, which accepts an over-approximation ponents. For instance, a modern fuel-injected engine has a num- of language that the consumer accepts. In each of the nested- ber of sensors that send their current measurements to the engine- word languages L(P ) and L(C), internal calls and returns in the control unit, which decides, for instance, what the optimum fuel-air corresponding program are made manifest in the words of the mixture should be. -

First-Order and Temporal Logics for Nested Words
First-Order and Temporal Logics for Nested Words Rajeev Alur Marcelo Arenas Pablo Barcel´o University of Pennsylvania PUC Chile Universidad de Chile KoushaEtessami NeilImmerman LeonidLibkin University of Edinburgh University of Massachusetts University of Edinburgh Abstract Pushdown systems (PDSs), Boolean Programs, and Re- cursive State Machines (RSMs), are equivalent abstract Nested words are a structured model of execution paths models of procedural programs, with finite data abstrac- in procedural programs, reflecting their call and return tion but unbounded call stack. Software model checking nesting structure. Finite nested words also capture the technology is by now thoroughly developed for checking structure of parse trees and other tree-structured data, such ω-regular properties of runs for these models, when the as XML. runs are viewed as ordinary words (see [5, 8, 1]). Unfor- We provide new temporal logics for finite and infi- tunately, temporal logic and ω-regular properties over ordi- nite nested words, which are natural extensions of LTL, nary words are inadequate for expressing a variety of prop- and prove that these logics are first-order expressively- erties of program executions that are useful in interproce- complete. One of them is based on adding a ”within” dural program analysis and software verification. These in- modality, evaluating a formula on a subword, to a logic clude Hoare-like pre/post conditions on procedures, stack CaRet previously studied in the context of verifying prop- inspection properties, and other useful program analysis erties of recursive state machines. The other logic is based properties that go well beyond ω-regular (see [2] for some on the notion of a summary path that combines the linear examples). -

Regular Languages of Nested Words: Fixed Points, Automata, and Synchronization ∗
Regular Languages of Nested Words: Fixed Points, Automata, and Synchronization ∗ Marcelo Arenas Departamento de Ciencia de la Computaci´on Pontificia Universidad Cat´olica de Chile [email protected] Pablo Barcel´o Leonid Libkin Departamento de Ciencia de la Computaci´on School of Informatics Universidad de Chile University of Edinburgh [email protected] [email protected] Abstract Nested words provide a natural model of runs of programs with recursive procedure calls. The usual connection between monadic second-order logic (MSO) and automata extends from words to nested words and gives us a natural notion of regular languages of nested words. In this paper we look at some well-known aspects of regular languages – their characterization via fixed points, deterministic and alternating automata for them, and synchronization for defining regular relations – and extend them to nested words. We show that mu-calculus is as expressive as MSO over finite and infinite nested words, and the equivalence holds, more generally, for mu-calculus with past modalities evaluated in arbitrary positions in a word, not only in the first position. We introduce the notion of alternating automata for nested words, show that they are as expressive as the usual automata, and also prove that Muller automata can be determinized (unlike in the case of visibly pushdown languages). Finally we look at synchronization over nested words. We show that the usual letter-to-letter synchronization is completely incompatible with nested words (in the sense that even the weakest form of it leads to an undecidable formalism) and present an alternative form of synchronization that gives us decidable notions of regular relations. -

Streaming Tree Transducers
Streaming Tree Transducers Rajeev Alur and Loris D'Antoni University of Pennsylvania November 2, 2018 Abstract Theory of tree transducers provides a foundation for understanding expressiveness and com- plexity of analysis problems for specification languages for transforming hierarchically structured data such as XML documents. We introduce streaming tree transducers as an analyzable, exe- cutable, and expressive model for transforming unranked ordered trees (and hedges) in a single pass. Given a linear encoding of the input tree, the transducer makes a single left-to-right pass through the input, and computes the output in linear time using a finite-state control, a visibly pushdown stack, and a finite number of variables that store output chunks that can be combined using the operations of string-concatenation and tree-insertion. We prove that the expressiveness of the model coincides with transductions definable using monadic second-order logic (MSO). Existing models of tree transducers either cannot implement all MSO-definable transformations, or require regular look ahead that prohibits single-pass implementation. We show a variety of analysis problems such as type-checking and checking functional equivalence are decidable for our model. 1 Introduction Finite-state machines and logics for specifying tree transformations offer a suitable theoretical foun- dation for studying expressiveness and complexity of analysis problems for languages for processing and transforming XML documents. Representative formalisms for specifying tree transductions include finite-state top-down and bottom-up tree transducers, Macro tree transducers (MTT), attribute grammars, MSO (monadic second-order logic) definable graph transductions, and spe- cialized programming languages such as XSLT and XDuce [1, 2, 3, 4, 5, 6, 7, 8]. -

Adding Nesting Structure to Words
Adding Nesting Structure to Words RAJEEV ALUR University of Pennsylvania and P. Madhusudan University of Illinois at Urbana-Champaign We propose the model of nested words for representation of data with both a linear ordering and a hierarchically nested matching of items. Examples of data with such dual linear-hierarchical structure include executions of structured programs, annotated linguistic data, and HTML/XML documents. Nested words generalize both words and ordered trees, and allow both word and tree operations. We define nested word automata—finite-state acceptors for nested words, and show that the resulting class of regular languages of nested words has all the appealing the- oretical properties that the classical regular word languages enjoys: deterministic nested word automata are as expressive as their nondeterministic counterparts; the class is closed under union, intersection, complementation, concatenation, Kleene-*, prefixes, and language homomorphisms; membership, emptiness, language inclusion, and language equivalence are all decidable; and de- finability in monadic second order logic corresponds exactly to finite-state recognizability. We also consider regular languages of infinite nested words and show that the closure properties, MSO-characterization, and decidability of decision problems carry over. The linear encodings of nested words give the class of visibly pushdown languages of words, and this class lies between balanced languages and deterministic context-free languages. We argue that for algorithmic verification of structured programs, instead of viewing the program as a context- free language over words, one should view it as a regular language of nested words (or equivalently, a visibly pushdown language), and this would allow model checking of many properties (such as stack inspection, pre-post conditions) that are not expressible in existing specification logics. -

CFG-TCS-2016.Pdf
Theoretical Computer Science 625 (2016) 1–24 Contents lists available at ScienceDirect Theoretical Computer Science www.elsevier.com/locate/tcs A complete refinement procedure for regular separability of context-free languages ∗ Graeme Gange a, Jorge A. Navas b, Peter Schachte a, Harald Søndergaard a, , Peter J. Stuckey a a Department of Computing and Information Systems, The University of Melbourne, Vic. 3010, Australia b NASA Ames Research Center, Moffett Field, CA 94035, USA a r t i c l e i n f o a b s t r a c t Article history: Often, when analyzing the behaviour of systems modelled as context-free languages, we Received 17 December 2014 wish to know if two languages overlap. To this end, we present a class of semi-decision Received in revised form 14 December 2015 procedures for regular separability of context-free languages, based on counter-example Accepted 12 January 2016 guided abstraction refinement. We propose two effective instances of this approach, Available online 27 January 2016 one that is complete but relatively expensive, and one that is inexpensive and sound, Communicated by D. Sannella but for which we do not have a completeness proof. The complete method will prove Keywords: disjointness whenever the input languages are regularly separable. Both methods will Abstraction refinement terminate whenever the input languages overlap. We provide an experimental evaluation Context-free languages of these procedures, and demonstrate their practicality on a range of verification and Regular approximation language-theoretic instances. Separability © 2016 Elsevier B.V. All rights reserved. 1. Introduction We address the problem of checking whether two given context-free languages L1 and L2 are disjoint.