Stochastic Optimal Energy Management of Smart Home with PEV Energy Storage
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Du Jie's Resume20190123
RESUME DU Jie Professor Ph.D Director, Office of International Cooperation and Exchange Dean, Overseas Education College of Chengdu University(CDU) Fellow Researcher of Sichuan Provincial Research Institute of Thai Studies Office of International Cooperation and Exchange, Chengdu University, Chengdu 610106, Sichuan, People’s Republic of China E-mail: [email protected] Tel: +86-159 0289 7700 RESEARCH INTERESTS ☆ Research on politics and society of Thailand ☆ Research on Marxism & the development of contemporary economic society ☆ Research & practice on college student affairs and leadership development EDUCATION 2014-2018 Visiting Scholar in University of New Hampshire, U.S.A. Research on Thai politics & society 2011-2016 University of Electronic Science and Technology Ph.D Education of Fundamental Principles of Marxism, School of Marxism 2009-2010 Visiting Scholar in Oklahoma State University in U.S. Research on college student leadership programs in American higher education 2006-2007 China Human Resource Development Association Top 5 of 40 in the National Professional Human Resources Management Training Course Certificate of Registered Human Resources Professional 2003- 2006 Fudan University M.A. Education of Marxist Theory and Education in Ideology and Politics, Dept. of Social Science 1996- 1999 Southwest Normal University B.A. English Education, Dept. of Foreign Languages 1990-1993 Chengdu University Associate degree in English Education, Dept. of English 1 ACADEMIC EXPERIENCE 2018-present Editorial Board Member, Translation Series -

ISSN 2538-7138/Online/ STEM EMBEDDED in the DUJIANGYAN IRRIGATION SYSTEM
STEM EMBEDDED IN THE DUJIANGYAN IRRIGATION ISSN 1648-3898 /Print/ SYSTEM: A DESCRIPTIVE - ISSN 2538-7138 /Online/ INTERPRETIVE ANALYSIS TO DESIGN STEM COURSE Abstract. STEM (science, technol- Jon-Chao Hong, ogy, engineering, and mathematics) Jian-Hong Ye, education is recognized as the world’s top Ya-Jiuan Ho, education program. However, few STEM programs have been designed based Ya-Jun Wang on cultural-historical events. To explore this issue, the present study drew on the cultural-historical activity theory and the content analysis method by adopting the descriptive-interpretative approach to explore the STEM content of the Dujiang- Introduction yan Irrigation System (DIS) in present-day Sichuan, China. As early as 2,275 years ago Science, Technology, Engineering and Mathematics (STEM) education is during the Warring States period, Li Bing, recognized as the world’s top educational project (Sergis et al., 2019). Train- the governor of Shu Shire in the Qin state, ing a sufficient number of graduates in STEM-related occupations has thus implicitly implemented the STEM concept become an important policy concern in many developed countries (Park et when building the irrigation system. The al., 2018). In recent years, STEM has been widely advocated and implemented results of this study indicate that the DIS in education because it is considered to have a great impact on students’ incorporates Science (e.g., the hydraulic interdisciplinary learning, which can be seen as an important driving force principle), Technology (e.g., making a large for the progress of a country (Kuo et al., 2019). The abbreviation of STEM was cobblestone Bamboo-Cage for building created by the National Science Foundation (NSF) in the United States in Fish Mouth), Engineering (e.g., water-level the 1990s (English, 2016). -

Analysis of Current Situation of Fancy Rope Skipping Curriculum in Regular Institutions of Higher Learning in Sichuan Province
2nd International Conference on Social Science and Technology Education (ICSSTE 2016) Analysis of Current Situation of Fancy Rope Skipping Curriculum in Regular Institutions of Higher Learning in Sichuan Province Zhang Yongmao Southwest Petroleum University, Chengdu Sichuan 610500 Abstract — This paper adopts the research years, some new actions such as the martial arts, methods such as literature material method, gymnastics, dance and art gymnastics are questionnaire investigation method, expert combined into the traditional rope skipping, interview method and mathematical statistics to which is called fancy rope skipping. It is a investigate and study the conditions of fancy rope newly emerging popular sports. It is fashionable skipping curriculum in 22 universities in Sichuan. with music accompaniment, various types and The research shows that the university teachers patterns and both simple and complicated highly recognize the fancy rope skipping curriculum; actions. It is challenging and has good fitness construction of teaching resources should be effects. So it is popular at home and abroad with strengthened; cultivation of the professional its unique charm. It is an effective aerobic teaching staffs should be strengthened; in terms of exercise; it can boost the development of organs teaching materials, more premium teaching and is good for physical and mental health. In materials with high pertinence and professionalism addition, it can help build the body, develop the are needed; the promotion and implementation of intelligence and improve the physical quality of the curriculum system of fancy rope skipping students. It is characteristic of ‘exercising the should be boosted in different steps and stages; body, the mind and figure’, which accords with cultivation of the professional teachers should be the characteristics of body and mind enlarged; related scientific research of the development of students in universities. -

P020181029362024361492.Pdf
Annex1: Name List of the Chinese Delegation No Name Sex Organization Title China Education Association for International Secretary 1 Zhao Lingshan M Exchange General China Education Association for International 2 Fu Bo F Director Exchange China Education Association for International Senior Program 3 Wang Ying F Exchange Director 4 Zhou Zuoyu M Beijing Normal University Vice President 5 Cheng Hongguang M Beijing Normal University Director 6 Chen Juan F Beijing Normal University Deputy Director 7 Zhang Xingchen M Beijing Jiaotong University Vice President 8 Lei Yalin F China University of Geosciences (Beijing) Vice President 9 Cai Min F China University of Geosciences (Beijing) Director 10 Sun Guohui M Central University of Finance and Economics Vice President Vice Chairman 11 Gang Wenzhe M China University of Political Science and Law of School Council 12 Qu Xin F China University of Political Science and Law Deputy Director Inner Mongolia Electronic Information Chairman of 13 Zhang Pengyu M Vocational Technical College School Council 14 Zhu Hong F Dalian University of Technology Vice President Program 15 Zhang Xuejiao F Dalian University of Technology Director 16 Wang Xijun M Heilongjiang University of Chinese Medicine Vice President 17 Yao Suyuan F Heilongjiang University of Chinese Medicine Director East China University of Science and 18 Liu Changsheng M Vice President Technology 19 Feng Qinghua M Shanghai International Studies University Vice President 20 Wang Youyong M Shanghai International Studies University Director Shanghai -
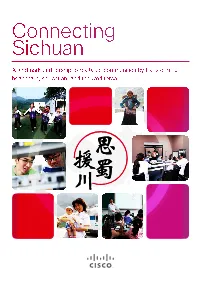
Connecting Sichuan
Connecting Sichuan A landmark partnership to revitalize communities by transforming healthcare, education, and the workforce Rebuilding Better, Together The people of Sichuan suffered great losses when a Social Impact at a Glance massive earthquake devastated their province in May 2008. In addition to significant loss of life, the earthquake Indicator Description Metric as of June 2011 destroyed many schools and hospitals located in rural, Community Counties within Sichuan 8 out of 10 of the hardest hard to reach areas. Cisco, the Cisco Foundation, and our investment benefiting from the program hit counties employees immediately responded by donating more Economic Program social investment US$50 million than US$2.6 million (about RMB 16.8 million) in grants and investment relief funds. But a longer-term response was needed to Building capacity Commercial, NGO, and 40 partners* restore and revitalize the region. Cisco and the Chinese through partners government partners contributing to the program government saw an opportunity for renewal in the midst of the Sichuan destruction—an opportunity to rebuild better, 21st century ICT Number of network-enabled 193 infrastructure healthcare and education together. institutions That vision for a better future resulted in the creation of 21st century skills Investment in professional +9,900 healthcare and development development and ICT skills education professionals a unique public-private partnership, a three-year Cisco trained corporate social responsibility program called Connecting Sichuan. * Excludes healthcare organizations and educational institutions Connecting Sichuan was designed to systematically transform healthcare, education, and the workforce About Sichuan in the province through the use of information and Long known as China’s Province of Abundance, communications technology (ICT). -

Sichuan University, Chengdu, China Conference on “Recent Advances in Fluid Dynamics and Nonlinear Dynamics”
International Conference on Recent Advances in Fluid Dynamics and Nonlinear Dynamics June 2–June 5, 2019 Sichuan University, Chengdu, China Conference on “Recent Advances in Fluid Dynamics and Nonlinear Dynamics” College of Mathematics, Sichuan University, Chengdu, China June 2-5, 2019 Objectives The aim of this international conference is to bring together experts who works on diverse frontiers of nonlinear PDEs and their appli- cations to survey recent progress and current challenges, to discuss how new ideas and methods could advance the related fields in com- ing years. The conference will contribute in promoting, enhancing, and stimulating cross-continental research interactions and collabo- rations in advanced mathematics applied to nonlinear sciences. Organizing Committee Co-Chairs Tian Ma (Sichuan University) Shouhong Wang (Indiana University, USA) Secretary Quan Wang (Sichuan University) Members Daozhi Han (Missouri University of Science and Technology) Hong Luo (Sichuan Normal University) Limei Li (Sichuan Normal University) Ruikuan Liu (Southwest Petroleum University) Zhigang Pan (Southwest Jiaotong University) Sponsorship College of Mathematics, Sichuan University 1 Conference Logistics 1. Registration: 1:00pm-11:00pm, June 2, 2019. 2. Time and Venue: • Invited talks, June 3-4, 2019. • Free discussions, June 5, 2019. • Conference Hall 303, College of Mathematics Building, Sichuan Uni- versity. 3. Accommodation: Kehua Hotel, No.141 Kehua North Road,Wuhou Dis- trict, Chengdu, China. 4. Meals: All meals are provided at Kehua Hotel. 5. Transport Information: • From Shuangliu International Airport to Kehua Hotel: 50RMB by taxi. • From Chengdu East Train Station to Kehua Hotel: 30RMB by taxi. • From Chengdu North Railway Station to Kehua Hotel: 50RMB by taxi. • From Kehua Hotel to Conference Hall 303: 10 minutes walk. -

Characteristics of the Disastrous Debris Flow of Chediguan Gully in Yinxing Town, Sichuan Province, on August 20, 2019
Characteristics of the Disastrous Debris Flow of Chediguan Gully in Yinxing Town, Sichuan Province, on August 20, 2019 Li Ning ( [email protected] ) School of Emergency Science, Xihua University Tang Chuan State Key Laboratory of Geohazard Prevention and Geoenvironment Protection, Chengdu University of Technology, Chengdu Zhang Xianzheng State Key Laboratory of Geohazard Prevention and Geoenvironment Protection, Chengdu University of Technology, Chengdu Chang Ming State Key Laboratory of Geohazard Prevention and Geoenvironment Protection, Chengdu University of Technology, Chengdu Shu Zhile School of Emergency Science, Xihua University Bu Xianghang State Grid Sichuan Electric Power Research Institute,Chengdu, Sichuan Research Article Keywords: debris ow, disaster characteristics, Wenchuan earthquake, drone measurement, sediment supply conditions Posted Date: August 25th, 2021 DOI: https://doi.org/10.21203/rs.3.rs-798905/v1 License: This work is licensed under a Creative Commons Attribution 4.0 International License. Read Full License 1 Characteristics of the disastrous debris flow of Chediguan gully in Yinxing 2 town, Sichuan Province, on August 20, 2019 3 ①,⁎ ② ② ② ① ③ LI Ning , TANG Chuan , ZHANG Xianzheng , CHANG Ming , SHU Zhile , BU Xianghang 4 (①School of Emergency Science, Xihua University, Chengdu 610039 China, 5 ②State Key Laboratory of Geohazard Prevention and Geoenvironment Protection, Chengdu University of Technology, Chengdu,61005 6 China, 7 ③State Grid Sichuan Electric Power Research Institute, Chengdu, Sichuan 610072, China) 8 ⁎ Corresponding author at: School of Emergency Science, Xihua University, No.9999 Hongguang Rd, Chengdu, 9 Sichuan 610039, China. Email: [email protected]. 10 Abstract: On August 20, 2019, at 2 a.m., a disastrous debris flow occurred in Chediguan gully in Yinxing town, 11 China. -
2017 年第 17 届 IEEE 通信技术国际会议 2017 17Th IEEE International Conference on Communication Technology (IEEE-ICCT2017)
2017 年第 17 届 IEEE 通信技术国际会议 2017 17th IEEE International Conference on Communication Technology (IEEE-ICCT2017) 2017 年 10 月 27-30 四川成都 Oct. 27-30, 2017 Chengdu, China Conference Abstract Venue: 会议地址: 锦江宾馆/Sichuan Jinjiang Hotel 中国四川成都人民南路二段 80 号 No.80 Renmin Road South, Chengdu, Sichuan, China 电话/Tel:800-886-9898 网址/ Web:http://www.jjhotel.com/ 电子邮件/E-mail: [email protected] 1 Table of Contents Welcome Remarks----------------------------------------------------------------------------------------------- 4 Conference Committee----------------------------------------------------------------------------------------- 5-10 Instructions for Workshop ----------------------------------------------------------------------------------- 11 Conference Speakers-------------------------------------------------------------------------------------------- 12-22 Conference Schedule-------------------------------------------------------------------------------------------- 23-25 Session 1- Coding Theory and Technology----------------------------------------------------------------- 26-29 Session 2- Computer Science and Applied Technology-------------------------------------------------- 29-32 Session 3- Data Transmission and Security---------------------------------------------------------------- 33-36 Session 4 - Communication and Information System---------------------------------------------------- 36-39 Session 5- Modern Information Theory and Signal Analysis------------------------------------------- 40-43 Session 6- Network Architecture Design -

2019 IEEE PES Innovative Smart Grid Technologies Asia ISGT ASIA 2019
2019 IEEE PES Innovative Smart Grid Technologies Asia ISGT ASIA 2019 Conference Program Organized by May 21-24, 2019 Chengdu, China INTERNATIONAL ADVISORY BOARD ISGT 2019 ORGANIZING COMMITTEE ISGT 2019 TECHNICAL COMMITTEE Alphabetical Order of the Last Name Abhisek Ukil, The University of Auckland Hui Ma, The University of Queensland Ahmad Zahedi, James Cook University Huifen Zhang, University of Jinan Ali Alouani, Tenessee Technology University Jaesung Jung, Ajou University Amit Kumar, B T K I T DWARAHAT Jiabing Hu, Huazhong University of Science and Anan Zhang, Southwest Petroleum University Technology Arsalan Habib Khawaja, National University of Science Jiajun Duan, GEIRI North America and Technology Jian-Tang Liao, National Cheng Kung University Ashkan Yousefi, University of California, Berkeley Jianxue Wang, Xi’an Jiaotong University Babar Hussain, PIEAS Jianxue Wang, Xi’an Jiaotong University Baorong Zhou, China Southern Power Grid Jie Wu, Sichuan Electric Power Research Institute Baorong Zhou, China Southern Power Grid Jinghua Li, Guangxi Key Laboratory of Power System Binbin Li, Harbin Institute of Technology Optimization and Energy Technology Biyun Chen, Guangxi Key Laboratory of Power System Jingru Li, State Grid Economic and Technological Optimization and Energy Technology (Guangxi Research Institute University) Jinrui Tang, Wuhan University of Technology Bo Hu, Chongqing University Jun Liang, Cardiff University Can Hu, State Grid Sichuan Company Junbo Zhao, Virginia Tech Can Huang, Lawrence Livermore National Laboratory Junjie -

Reviewers IHMSC 2011
Reviewers IHMSC 2011 Chen Guo, Nanjing University of Aeronautics and Astronautics Jia Minping, Southeast University Xu Feiyun, Southeast University Meng Guang, Shanghai Jiaotong University Chu Fulei, Tsinghua University Ding Yonggui, Tsinghua University Wang Xue, Tsinghua University Zhu Rong, Tsinghua University, Lu Wenxiu, Tsinghua University Shi Tielin, Huazhong University of Science and Technology He Songling, Huazhong University of Science and Technology Yang Jingyu, Nanjing University of Science and Technology Duan Haibin, Beihang University Qian Feng, East China University of Science and Technology Zhou Mingtian, University of Electronic Science and Technology Gao Lin, Xidian University Yan Wenjun, Zhejiang University Sun Fuchun, Tsinghua University Li Junjie, Dalian University of Technology Su Jianbo, Shanghai Jiaotong University Yang Jie, Shanghai Jiaotong University Shi Pengfei, Shanghai Jiaotong University Zhao Long, Beihang University Wang Yan, Beihang University Zhou Jianhua, Xi’an Jiaotong University Han Chongzhao, Xi’an Jiaotong University Xu Congfu, Zhejiang University Wu Fei, Zhejiang University Dai Jianhua, Zhejiang University Qin Keyun, Southwest Jiaotong University Li Tianrui, Southwest Jiaotong University Qiu Xiaoping, Southwest Jiaotong University Meng Dan, Southwestern University of Finance and Economics Pan Wuming, Sichuan University Pei Zheng, Xihua University Qian Yuntao, Zhejiang University He Qinming, Zhejiang University Liu Yangguang, Ninbo Institute of Technology, Zhejiang University Xu Weiqian, Zhejiang Sci-Tech University Cai Ming, Zhejiang University xii Chen Shengyong, Zhejiang University of Technology Deng Yong, Shanghai Jiaotong University Hu Xiaobing, Chongqing University Li Yangguang, Nanjing University of Aeronautics and Astronautics Jun Liu, University of Ulster, UK Ma Jun, Southwest Jiaotong University, P.R. China Zhao Hailiang, Southwest Jiaotong University Radim Jirousek, Institute of Information Theory and Automation, Czech Republic Enrique Miranda, University of Oviedo, Spain Lev Utkin, St. -

Directors and Senior Management
DIRECTORS AND SENIOR MANAGEMENT BOARD OF DIRECTORS Our Board consists of eight Directors, including two executive Directors, two non-executive Directors and four independent non-executive Directors. Our Board has the general powers and duties for the management and conduct of our business. The table below sets forth information regarding our current Directors: Roles and Name Age Position Date of appointment responsibilities Mr. Wu Xiao An (also known as Mr. Ng Siu On) ( )...... 51 Chairman and March 10, Overall strategic executive Director 2011 planning and business development Mr. Wang Yunxian ( )..... 58 Chief executive March 10, 2011 Business operation officer and executive Director Mr. Qi Yumin ( )......... 53 Non-executive November 16, As a Director 2011 non-executive Director Mr. Li Peiqi ( ) .......... 61 Non-executive August 29, 2012 As a Director non-executive Director Mr. Chi Guohua ( ) ....... 38 Independent non- November 22, As an independent executive Director 2012 Director Mr. Wang Jun ( ) .......... 51 Independent non- April 24, 2012 As an independent executive Director Director Mr. Huang Haibo ( ) ...... 58 Independent non- November 30, As an independent executive Director 2011 Director Mr. Wang Songlin ( ) ..... 61 Independent non- April 24, 2012 As an independent executive Director Director EXECUTIVE DIRECTORS Mr. Wu Xiao An (also known as Mr. Ng Siu On),( ), aged 51, is our chairman, he was appointed as our Director on March 10, 2011 and designated as our executive Director on April 24, 2012. He has over 18 years of experience in the automotive industry and is primarily responsible for the overall strategic planning and business development of our Group. Since April 1998, he has been serving as a director of Southern State, our direct wholly-owned subsidiary. -

Page 1 of 38 YUCHENG LIU Associate Professor and Graduate
Yucheng Liu Curriculum Vita YUCHENG LIU Associate Professor and Graduate Coordinator, Ph.D., P.E. Jack Hatcher Chair in Engineering Entrepreneurship ASME Fellow Department of Mechanical Engineering Mail Stop 9552, 222 Carpenter Hall James Worth Bagley College of Engineering Mississippi State University Mississippi State, MS 39762 (662) 325-1536 (O) (662) 325-7223 (F) Email: [email protected] Nationality: People’s Republic of China Immigration Status: Permanent Resident in USA, Alien of Extraordinary Ability BIOGRAPHICAL DATA EDUCATION 2002-2005 Doctor of Philosophy degree in Mechanical Engineering granted August 2005 University of Louisville, Louisville, Kentucky Research area: advanced product design and development/finite element methods 2000-2002 Master of Science degree in Mechanical Engineering granted August 2003 University of Louisville, Louisville, Kentucky Research area: computer aided design/finite element methods 1993-1997 Bachelor of Science degree in Mechanical Engineering granted July 1997 Hefei University of Technology, Hefei, Anhui, China Major: mechanical and computational design EMPLOYMENT 2018-Present Jack Hatcher Chair in Engineering Entrepreneurship, The James Worth Bagley College of Engineering, Mississippi State University, Mississippi State, Mississippi 2016-Present Graduate Coordinator, Department of Mechanical Engineering, The James Worth Bagley College of Engineering, Mississippi State University, Mississippi State, Mississippi 2014-Present Associate Professor, Department of Mechanical Engineering, The James