Chapter 2
MODELING THE EFFECT OF HARVESTING ON FOOD CHAIN MODEL WITH HABITAT COMPLEXITY
INTRODUCTION
In aquatic communities trophic interactions regulate the stability and diversity of communities in space and time. Food chains and food webs consisting of three or more species, modeled with the functional response of the consumer species, have been extensively studied by Freedman and Waltman, 1977; Hsu et al., 2003; Patra et al., 2009. Thus three species systems like nutrient-bacteria-ciliate; plant-herbivore- parasitoid, plant-pest-predator etc are emerging in different branches of biology in their own right. Food Chains are special food webs in which each prey has only one predator. It has been documented that structurally complex habitats may reduce predation rates by decreasing encounter rates between predator and prey. The terms habitat complexity and topographic complexity have been used as synonyms of habitat structure (Beck, M.W., 1998). McCoy & Bell, 1991 attempted to create a universal definition for habitat structure as the “arrangement of objects in space”. This definition included a graphical model, with three major variables-complexity, heterogeneity and scale. ‘Complexity’ refers to the amount of structure or variation attributable to the absolute abundance of individual structural components. ‘Heterogeneity’ represents the kinds of structure or variation attributable to the relative abundance of different structural components. ‘Scale’ emphasizes that
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 30 the first two components must be commensurate with the dimensions of the organisms being studied.
The theory of harvesting is important in natural resource management and bioeconomics. There are numerous studies on the effects of harvesting on population growth. Most species have a growth rate which more or less maintains a constant population equal to the carrying capacity of the environment K (this of course depends on the population). The harvesting of species affects their mortality rates and if the harvesting is not too much the population will adjust to a new equilibrium
X* K . It has been evident that there is a need to develop ecologically acceptable strategies for harvesting any renewable resources such as fish, plants, animals etc. In the context of prey-predator interaction, some studies that treat the population being harvested as a homogeneous resource include those of Dai and Tang (1998),
Myerscough et al. (1992), Chaudhuri (1996) and Leung (1995). Our model is motivated by food chain model given by Agarwal and Sapna (2011). They saw the effect of harvesting and time delay on a food chain model. The time delay is the inherent property of the dynamical systems and plays an important role in almost all branches of science and particularly in the biological sciences. In most of the studies, delay occurs in a first degree term. Sun et al. (2006) investigated the direction and stability of a delay-induced eco-epidemiological system with Type I response function
(1959), where delay occurred in the term of degree two.
In this chapter, a nonlinear mathematical model is proposed and analyzed to see the effect of harvesting on food chain model with habitat complexity. We first modify Holling type II response function (1959) to incorporate the effect of habitat complexity and then introduce time delay in the second degree term. We study the
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 31 effect of complexity of space and gestation delay on the stability of a food chain model. It is observed that there are stability switches, and Hopf bifurcation occurs when the delay crosses the critical value. It is observed that the quantitative level of abundance of system population depends crucially on the delay parameter if the gestation period exceeds some critical value. However, the fluctuations in the population levels can be controlled completely by increasing the complexity of space.
2.1 MATHEMATICAL MODEL
The mathematical model for the tritrophic food chain model with habitat complexity can be described by the following system of nonlinear differential equations.
dV V a1VX u0 1 q1EV , dt m b1 V dX a V a (1 c)XY 1 2 X q2 EX , (2.1.1) dt b1 V 1 a2 (1 c)hX dY a2 (1 c)X Y . dt 1 a2 (1 c)hX
V (0) V0 0, X (0) X 0 0, Y(0) Y0 0, 0 , 1, 0 c 1.
Here, V be the vegetation biomass, X be the density of grazer population and Y be the density of predator population. It is assumed that the dynamics of vegetation biomass follow regrowth equation and its depletion due to the grazer population is given by a hyperbolic type of interaction involving the density of grazer population
X as well as the concentration V (i.e.VX /(b1 V ) ). It is further assumed that the rate of depletion of V due to harvesting is proportional to the product of vegetation
biomass and applied effort with catchability coefficient q1. As grazer population is
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 32 wholly dependent on vegetation biomass, its growth rate is proportional to the
interaction term (a1VX /(b1 V )). It is considered here that the natural depletion rate of density of grazer population is proportional to X It is further assumed that the depletion rate of grazer population density by its predator is given by the hyperbolic
interaction between grazers and its predators (i.e. a2 (1 c)XY 1 a2 (1 c)hX ). The depletion rate of grazer population due to harvesting is proportional to the product of
concentration of N and applied effort with catchability coefficient q2 .The growth rate of predator population is proportional to the interaction term (i.e.
a2 (1 c)XY 1 a2 (1 c)hX ). The natural depletion rate of predator population is
considered proportional toY. u0 is initial regrowth rate of the vegetation biomass, m
is the carrying capacity of vegetation biomass, a1 is the attack rate of grazers, b1 is the half-saturation constant, is the vegetation-grazer conversion rate, is the zero
population growth grazer intake, a2 is the saturation killing rate (the maximum killing rate), is the prey (grazer)-predator conversion rate, is the zero population growth predator intake, h is the handling time and 0 c 1is a dimension less parameter that measures the degree or strength of habitat complexity. It is to be noted, when c 0 , i.e. when there is no complexity, we get back the original Holling Type II response function. It may be pointed out that for feasibility of the model (2.1.1), the growth rates of grazer population should be positive.
To analyze the model (2.1.1), we need the bounds of dependent variables involved.
For this we find the region of attraction in the following lemma.
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 33 u Lemma 2.1: The set (V , X ,Y ) : 0 V X Y 0 , where
u0 min q1 E,q2 E , m is the region of attraction for all solutions initiating in the interior of the positive octant.
Proof: Let (V (t), X (t),Y(t)) be any solution with positive initial conditions (
V0 , X 0 ,Y0 ).
Define a function
W (t) V (t) X (t) Y(t).
Computing the time derivative of W (t) along the solutions of a system (2.1.1), we get dW V a VX a V a (1 c)XY 1 1 2 u0 1 q1EV X dt m b1 V b1 V 1 a2 (1 c)hX
a2 (1 c)XY q2 EX Y , 1 a2 (1 c)hX
u0 u0 q1E V (q2 E )X Y , m
u0 W , where
u0 min q1 E,q2 E ,. m
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 34 Thus
W (t) W (t) u0 .
Applying a theorem of differential inequalities, we obtain
u W (V , X ,Y ) 0 W (V , X ,Y ) 0 0 0 0 , exp(t)
u and for t , 0 W 0 . Therefore all solutions of system (2.1.1) enter into the region
u (V , X ,Y ) : 0 W 0 .
This completes the proof of lemma.
2.2 EQUILIBRIUM ANALYSIS
There exist following three equilibria of the system (2.1.1)
mu0 (i) E1 (V1 ,0,0), where V1 0, u0 mq1 E
(ii) E2 (V2 , X 2 ,0) and
(iii) E3 (V*, X*,Y*).
The equilibrium E2 exists to provide that
b b q E a ( q E)1 1 1 1 0, 1 2 m u0 where
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 35 b b q E b ( q E) u a ( q E)1 1 1 1 1 2 0 1 2 V2 , m u a ( q E) 0 1 2 X 2 . [a1 ( q2 E)]( q2 E)
The equilibrium E3 exists to provide that
a V * c 1, h 1, 1 q E, * 2 b1 V where
* * * 1 a1V X 0, Y q2 E , a2 (1 c)(1 h) a (1 c)(1 h) * 2 b1 V and V * is the unique positive root of the following equation
2 a2 (1 c)(1 h)(u0 mq1E)V * [(u0b1 mq1b1E u0 m)(a2 (1 c)(1 h)) a1m]V *
u0 mb1a2 (1 c)(1 h) 0.
2.3 STABILITY ANALYSIS
To discuss the local stability of the system (2.1.1), we compute the variational matrix of the system (2.1.1). The entries of the general variational matrix are given by differentiating the right side of the system (2.1.1) with respect to V , X andY , i.e.
u a b X a V 0 q E 1 1 1 0 1 2 m (b1 V ) b1 V a b X a V a (1 c)Y a (1 c)X M (V , X ,Y) 1 1 1 2 q E 2 . 2 2 2 (b1 V ) b1 V 1 a2 (1 c)hX 1 a2 (1 c)hX a (1 c)P a (1 c)X 0 2 2 2 1 a (1 c)hX 1 a2 (1 c)hX 2
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 36 Using analogous notations to the equilibria i.e. M (E1 ) is the variational matrix
corresponding to E1 , M (E2 ) is the variational matrix corresponding to E2 and M (E3 )
is the variational matrix corresponding to E3 , we get
u a V 0 q E 1 1 0 m 1 b V 1 1 a1V1 M (E ) 0 q E 0 . 1 b V 2 1 1 0 0
u a V M (E ) 0 q E , 1 1 q E . The three eigenvalues of 1 are 1 2 and m b1 V1
This implies that E1 is locally stable in the V Y plane. As to the X direction, it is
a V 1 1 q E locally unstable if 2 is positive (which is the necessary condition b1 V1
a V E E 1 1 q E for the existence of 2 ) whenever 2 exists and stable if 2 is b1 V1
negative. Hence E1 is the unstable saddle point whenever E2 exists otherwise it is locally asymptotically stable.
u0 a1b1 X 2 a1V2 q1E 2 0 m (b1 V2 ) (b1 V2 ) a1b1 X 2 a2 (1 c)X 2 M (E2 ) 0 . 2 1 a (1 c)hN (b1 V2 ) 2 2 a2 (1 c)X 2 0 0 1 a2 (1 c)hX 2
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 37 a (1 c)X 2 2 The eigenvalues of M (E2 ) are and 1 a2 (1 c)hX 2
2 2 u u 1 0 a1b1 X 2 0 a1b1 X 2 4a1 b1 X 2V2 2 q1E q1E . 2 m (b V ) 2 m (b V )2 (b V )3 1 2 1 2 1 2
The signs of the real parts of 2 and 2 are negative. This implies that E2 is locally
asymptotically stable in the V X plane. E2 is asymptotically stable or unstable in
a2 (1 c)X 2 Y direction according to whether is negative or positive. 1 a2 (1 c)hX 2
Now we discuss the stability of the interior equilibrium point
* * u0 a1b1 X a1V q1E 0 m * 2 * (b1 V ) (b1 V ) * 2 2 * * * a1b1 X a2 (1 c) hY X a2 (1 c)X M (E3 ) . (b V *)2 (1 a (1 c)hX *)2 (1 a (1 c)hX *) 1 2 2 a (1 c)Y * 0 2 0 * 2 (1 a2 (1 c)hX )
The characteristic equation corresponding to variational matrix M (E3 ) is given by
3 2 A1 A2 A3 0, where
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 38 * 2 2 * * u0 a1b1 X a2 (1 c) hY X A1 q1E , m * 2 * 2 (b1 V ) (1 a2 (1 c)hX )
u a b X * a 2 (1 c) 2 hY * X * a 2 (1 c)2 Y * X * X *V * a 2b A 0 1 1 q E 2 2 1 1 , 2 2 1 2 3 3 m (b1 V*) (1 a2 (1 c)hX*) (1 a2 (1 c)hX*) (b1 V*)
2 2 * * * a2 (1 c) Y X u0 a1b1 X A3 q1E . * 3 m * 2 (1 a2 (1 c)hX ) (b1 V )
Then by Routh-Hurwitz criteria equilibrium E3 is locally asymptotically stable if
A1 0, A3 0, and A1 A2 A3 and unstable if either of these conditions is not satisfied.
2.4 PERSISTENCE
Theorem 2.4.1: Let
ma u 1 a (1 c)X 1 0 2 2 q2 E, and min , . b1u0 b1mq1E mu0 h 1 a2 (1 c)hX 2
Then the system (2.1.1) is uniformly persistent.
Proof: Suppose u is a point in the positive octant and O(u) is the orbit through u and
is the omega limit set of the orbit throughu Note that (u) is bounded.
We claim that E1 (u).If E1 (u), then by Butler-McGhee lemma there exists a
S S pointu1 in (u) M (E1 ) , where M (E1 ) denote the stable manifold of E1. Since
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 39 ma u (u), 1 0 q E O(u1 ) lies in the condition 2 implies that b1u0 b1mq1E mu0
S E1 is a saddle point and M (E1 ) is the V Y plane, we conclude that O(u1 ) is unbounded, which is a contradiction.
Next, we show that E2 u .If E2 u , the condition
a2 1 cX 2 s is positive implies that E2 is a saddle point. M (E2 ) is the V X 1 a2 1 cX 2 plane, again we conclude that an unbounded orbit lies in(u),a contradiction.
Thus, (u) lies in the positive octant and the system (2.1.1) are persistent.
Finally, since only the closed orbits and the equilibria form the omega limit set of the
3 solutions on the boundary of R and system (2.1.1) is deceptive, by the main theorem in Butler et.al. , implies that system (2.1.1) is uniformly persist.
2.5 ANALYSIS OF THE MODEL WITH DELAY
In this section, we consider the model (2.1.1) with delay. Introducing the gestation delay 0in the system (2.1.1), we get the desired delay-induced food- chain model with habitat complexity as follows
dV V a1VX u0 1 q1EV , dt m b1 V
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 40 dX a V a (1 c)XY 1 2 X q2 EX , (2.5.1) dt b1 V 1 a2 (1 c)hX
dY a (1 c)X (t )Y(t ) 2 Y . dt 1 a2 (1 c)hX (t )
With initial condition given by
V () 1 () 0, X () 2 () 0, Y() 3 () 0, ,0 .
Now we linearize system (2.5.1) about E3 and obtain
* * dv u0v a1V n a1b1 X v q1Ev, dt m * * 2 b1 V (b1 V )
dx a1b1 X * v a2 (1 c)X * y a2 (1 c)Y * x a1V * x 2 x q2 Ex 2 , (2.5.2) dt (b1 V*) 1 a2 (1 c)hX * {1 a2 (1 c)hX *} b1 V *
dy a2 (1 c)Y * x(t ) a2 (1 c)y(t )X * 2 y(t ). dt {1 a2 (1 c)hX*} {1 a2 (1 c)hX*}
Where v, x and y are small perturbations given to V , X and Y, respectively such that V t V * vt, X t X * xt and Yt Y* yt .
* * u0 a1b1X a1V q1E 0 m * 2 * (b1 V ) (b1 V ) * * * a1b1X a2 (1 c)Y a1V * a2 (1 c)X M q2E . * 2 * 2 * (b V ) (1 a (1 c)hX ) b1 V * (1 a (1 c)hX ) 1 2 2 * a2 (1 c)Y e a2 (1 c)X *e 0 e * 2 {1 a (1 c)hX *} (1 a2 (1 c)hX ) 2
The characteristic equation associated with system (2.5.2) is given by
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 41 2 3 2 R3 (R1 R3 R2 R3 R4 ) R1 R2 R3 (R1 R2 ) (R1 R2 R5 ) e 0, (2.5.3) R1 R4 R5 R3 where
u0 a1b1 X * a2 (1 c)Y * a1V * R1 2 q1E, R2 q2 E 2 , m (b1 V*) {1 a2 (1 c)hX*} b1 V *
a (1 c)X * a 2 (1 c) 2 X *Y * a 2b V * X * R 2 , 2 1 1 3 R4 3 , R5 3 . 1 a2 (1 c)hX * {1 a2 (1 c)hX*} (b1 V*)
We have already shown that the interior equilibrium point E3 is locally asymptotically stable in the absence of a delay.
Now when 0, stability of the system (2.5.1) can change only if there exists at least one root of the equation (2.5.3) such that Re() 0 . Let i be one such root.
Substituting this in equation (2.5.3) and equating real and imaginary parts, we get
2 3 S 3 cos (S 4 R3 ) sin S 2 , (2.5.3a)
2 2 S3 sin (S 4 R3 )cos S1 . (2.5.3b)
Where
S R R , S R R R , S R R R R R , S R R R R R R R . 1 1 2 2 1 2 5 3 1 3 2 3 4 4 1 2 3 1 4 3 5
Squaring and adding equations (2.5.3a) and (2.5.3b), we get
6 4 2 2 2 2 2 2 2S2 S1 R3 S2 S3 2S 4 R3 S4 0 . (2.5.4)
Substituting 2 equation (2.5.4) becomes
3 2 2 2 2 2 2 {S1 R3 2S2 } {S2 S3 2S4 R3} S4 0 . (2.5.5)
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 42 Now, let assume
2 2 (H1) S1 R3 2S 2 0 and
2 2 (H2) S2 S3 2S4 R3 0 .
So by Descartes’ rule of sign, equation (2.5.5) has at least one positive real root. This
implies that equation (2.5.4) has a real root. Hence E3 does not remain stable for all
0. So stability change can occur.
Again solving (2.5.3a) and (2.5.3b), we get a critical value of delay that is given as follows
4 2 1 1 (S3 S1R3 ) (S1S4 S2 S3 ) c cos 2 2 2 2 . S3 (S 4 R3 )
This is the least positive value of delay for which stability change can occur. To establish Hopf bifurcation, we can verify the following transversality condition d Re() 0 (2.5.6) d
at c , where c is the critical value of .
Differentiating equation (2.5.3) with respect to , we obtain
1 d 32 2(R R ) R R R 2R (R R R R R ) 1 2 1 2 5 3 1 3 2 3 4 , 3 2 2 d (R1 R2 ) (R1R2 R5 ) R3 (R1R3 R2 R3 R4 ) R1R2 R3 R1R4 R3 R5
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 43 1 2 2 2 2 2 2 2 4 2 4 2 4 4 6 d(Re ) R1 R2 2R1 R2 R5 R5 2R1 2R2 2R2 4R5 3 2 d 4 2 (R R R ) 6 (R R ) 2 1 2 5 1 2 (2.5.7) 2R 2 R 2 R 2 R 2 2 R 2 R 2 2 2R R R 2 R 2 2 2R 2 4 3 5 1 3 2 3 2 3 4 4 3 . 4 2 3 2 (R1 R3 R2 R3 R4 ) (R1 R2 R3 R1 R4 R3 R5 ) R3
For a set of parameters shows that transversality condition holds and hence Hopf
bifurcation occurs at c .
2.6 NUMERICAL SIMULATION FOR BIFURCATION
In this section, we present numerical simulation to illustrate results obtained in previous sections. The system (2.1.1) is solved using fourth order Runge-Kutta
Method with the help of MATLAB software package.
Hopf bifurcation analysis of the instantaneous model
We shall vary c in system (2.1.1) so as to obtain a Hopf bifurcation. Now, we write autonomous system (2.1.1) in the form n˙ F(n,k) , where
n (V , X ,Y ),k (u0 ,m,a1 ,b1 ,q1 ,, E,,a2 ,c,h,q2 ,, ) .
We say that an ordered pair (n0 ,k0 ) is a Hopf bifurcation point if
(i) F(n0 ,k0 ) 0 ,
(ii) J (n,k) has two complex conjugate eigenvalues 1,2 around (n0 ,k0 ) ,
1,2 a(n,k) ib(n,k) ,
(iii) a(n0 ,k0 ) 0,b(n0 ,k0 ) 0 ,
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 44 (iv) The third eigenvalue 3 (n0 ,k0 ) 0 .
Extensive numerical simulations are carried out for various values of parameters and for different sets of initial conditions. We take the parameters of the system (2.1.1) as,
u0 3,m 50,a1 1.0,b1 0.5,q1 0.5, 1.0, 0.5,a2 1.0,q2 0.07
E 0.5, 1.0, 0.6 and h 0.04 . (2.6.1)
We consider the system dV V 1VX 31 0.50.5V , dt 50 0.5 V dX 1V 1(1 c)XY 1 X 0.5 0.070.5 X , (2.6.2) dt 0.5 V 11(1 c)0.04 X dY 1(1 c)X 1Y 0.6. dt 11(1 c)0.04 X
The system (2.6.2) always has non-negative equilibrium E1 (1.17188,0,0) . The system
(2.6.2) has positive equilibra E2 (V2 , X 2 0) and E3 (V*, X*,Y*) if and ifc 0,1.
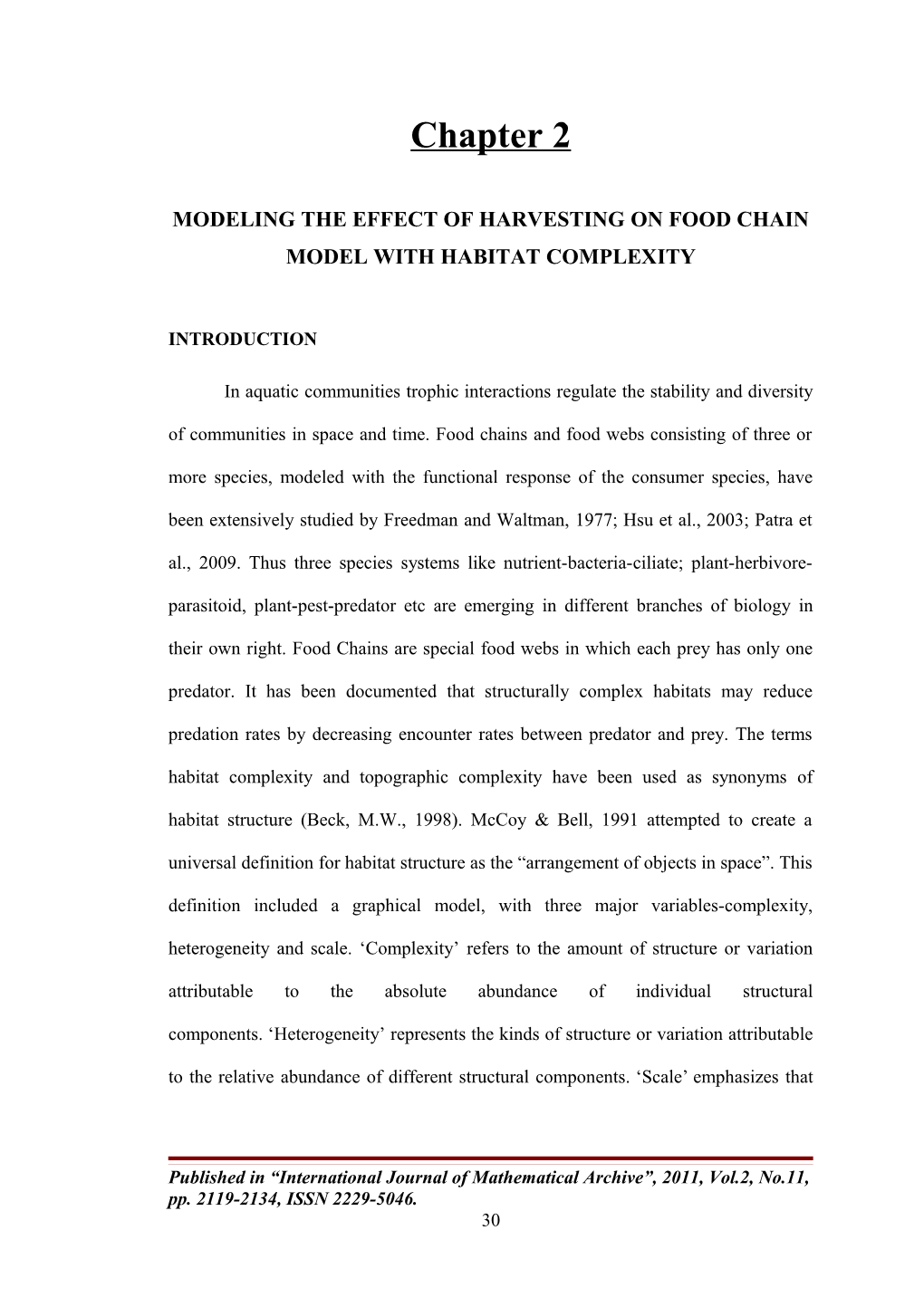
(1) Take c 0.4 , k (3,50,1,0.5,0.5,1,0.5,0.6,1,0.4,0.04,0.07,1,0.6) .
The coordinates of E3 and the corresponding eigenvalues are
n1 (6.60489, 1.02459, 0.673883) ,
1 0 0.488218 i , 2 0 0.488218 i , 3 0.258037 .
In this way ordered pair (n0 ,k0 ) satisfied above all conditions (i-iv). So ordered pair
(n0 ,k0 ) is a Hopf point.
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 45 1.3
1.2
1.1
1
0.9
0.8 Y 0.7
0.6
0.5
0.4
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 X
Figure 1. Here V (0) 5 , X (0) 1 ,Y(0) 0.96 and other parameters are same as (2.6.1).
(2) For c 0.3 0.4 , k (3,50,1,0.5,0.5,1,0.5,0.6,1,0.3,0.04,0.07,1,0.6).
The coordinates of E3 and the corresponding eigenvalues are
n1 (7.0325, 0.87822, 0.583462),
1 0.00244973 0.488876 i,2 0.00244973 0.488876 i,3 0.257589 .
All eigenvalues have not negative real parts, only 3 has negative real part, so E3 is always saddle point at c 0.3.
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 46 1
0
-1 2 2.5 1.5 2
1 1.5 1 0.5 0.5 Y 0 0 X
Figure 2. Here V (0) 5, X (0) 1,Y (0) 0.96 and other parameters are same as (2.6.1).
(3) But if we take c 0.8 0.4 , k (3,50,1,0.5,0.5,1,0.5,0.6,1,0.8,0.04,0.07,1,0.6).
The coordinates of E3 and the corresponding eigenvalues are
n1 (1.86145, 3.07377, 1.29747) ,
1 0.130436 0.52648 i,2 0.130436 0.52648 i,3 0.267997 .
All eigenvalues have negative real parts, so equilibrium point is locally asymptotically stable at c 0.8.
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 47 1.8
1.6
1.4
1.2 Y 1
0.8
0.6
0.4 1.5 2 2.5 3 3.5 4 4.5 5 X
Figure 3. Here V (0) 5, X (0) 1,Y (0) 0.96 and other parameters are same as (2.6.1).
It shows numerically that the Hopf point is found when c 0.4 . E3 is unstable when c 0.4 and stable when c 0.4 . The numerical study presented here shows that, using the parameter c as control, it is possible to break the stable behavior of the system (2.6.2) and drive it in an unstable state. Also, it is possible to keep the population levels in a required state using the above control.
Hopf bifurcation analysis of the time-delay model
To check the feasibility of our analysis regarding stability conditions, we have conducted some numerical computation using MATLAB 7.9 by choosing the following set of parameter values in the system (2.1.1)
u0 3,m 50,a1 1.0,b1 0.5,q1 0.5, 1.0, 0.5,a2 1.0,q2 0.07,c 0.6,
E 0.5, 1.0, 0.6,h 0.04. (2.6.3)
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 48 For the above set of parameter values, the equilibrium point E3 exists and is given by
* * V 5.15785, X 1.53689, Y* 0.964721.
Variational matrix M (E3 ) corresponding to the equilibrium E3 is given by
0.334005 0.911627 0 M (E ) 0.0240055 0.00903908 0.600002. 3 0 0.367588 0
The characteristic equation resulting from this is given by
3 0.324966 2 0..239418 0.073661 0.
From this characteristic equation, we note that all conditions of Routh – Hurwitz
criteria are satisfied and eigenvalues of M E3 are given by 0.00613417
0.485329 i and 0.312698. Hence, E3 is locally asymptotically stable equilibrium point.
Further, for the above set of parameters, we observed that stability criteria in the absence of delay 0, will not necessarily guarantee the stability of the system
(2.5.2) in the presence of delay 0. It can be seen that critical value is
c 0.0545544 , where stability switch may occur. We also observe that the transversality condition (2.5.6) is satisfied as
d Re() 14.6426 0 . d c
Therefore (V*, X*,Y*) is asymptotically stable for 0.05 and 0.03 c (see
Figures (4a, 4c)) and unstable for 0.1 c (see Figure (4b)). Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 49 1
0 0.5
-1 1 2.5 2 1.5 1.5 Y 1 X 0.5 2
Figure 4a. When 0.05 ,V (0) 5, X (0) 1,Y (0) 0.96 and other parameters are same as (2.6.3)
2.5
2
1.5 Y
1
0.5
0 0.5 1 1.5 2 2.5 3 3.5 X
Figure 4b. When 0.1,V (0) 5, X (0) 1,Y(0) 0.96 and other parameters are same as (2.6.3).
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 50 1.5
1.4
1.3
1.2
1.1
Y 1
0.9
0.8
0.7
0.6
0.5 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 X
Figure 4c. When 0.03 ,V (0) 5, X (0) 1,Y (0) 0.96 and other parameters are same as (2.6.3).
5.5
5
4.5
4 V
3.5 X Y 3 Y , X
, 2.5 V 2
1.5
1
0.5 0 50 100 150 200 250 300 350 400 450 500 t Figure 5a. When 0.0545544 ,V (0) 5.15785, X (0) 1.53689,Y(0) 0.964721 and other parameters are same as (2.6.3).
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 51 6
5 V 4 X Y , ,
V X 3Y
2
1
0 0 50 100 150 200 250 300 350 400 450 500 t
Figure 5b. When 0.1,V (0) 5.15785, X (0) 1.53689,Y(0) 0.964721 and other parameters are same as (2.6.3).
5.5
5
4.5 V 4 X 3.5 Y , , V X Y 3
2.5
2
1.5
1
0.5 0 50 100 150 200 250 300 350 400 450 500 t
Figure 5c. When 0.03 ,V (0) 5.15785, X (0) 1.53689,Y(0) 0.964721 and other parameters are same as (2.6.3).
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 52 4 0 E=0 3 5 E=0.5 E=7.5 3 0
2 5
2 0 V
1 5
1 0
5
0 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 4 5 0 5 0 0 t
Figure 6. When 0.0545544 ,V (0) 5.15785, X (0) 1.53689,Y(0) 0.964721 and other parameters are same as (2.6.3).
25 E=0 E=0.5 20 E=7.5
15 X
10
5
0 0 50 100 150 200 250 300 350 400 450 500 t
Figure 7. When 0.0545544 ,V (0) 5.15785, X (0) 1.53689,Y(0) 0.964721 and other parameters are same as (2.6.3).
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 53 15 E=0 E=0.5 E=7.5
10 Y
5
0 0 50 100 150 200 250 300 350 400 450 500 t
Figure 8. When 0.0545544 ,V (0) 5.15785, X (0) 1.53689,Y(0) 0.964721 and other parameters are same as (2.6.3).
In figures (5a-5b) vegetation biomass, grazer population and predator population are plotted against t for different values of . Figure (6) is the plot of vegetation biomass against t for different values of E . From this, we note that the density of vegetation biomass decreases as E increases. Figures(7) is the plot of grazer population against t for different values of E. From this figure, it can be inferred that grazer population first remains constant as E increases, then starts decreasing as E tends towards the value 7.5. Figure (8) is the plot of predator population against t for different values E.
This figure shows that predator population decreases and becomes extinct if E 7.5.
2.7 CONCLUSION
In this chapter, we have studied a delay-induced food-chain model in presence of habitat complexity. Using stability theory of differential equations, we have obtained conditions for the existence of different equilibria and discussed their
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 54 stabilities. We have also obtained conditions under which system persists by using differential inequality. Our numerical study shows that habitat complexity behaves as a control, it is possible that it breaks the stable behavior of the system (2.1.1) and drives it to an unstable state. Also, it is possible to keep the population levels in a required state using the above control. Further, we see the effect of harvesting of vegetation biomass and grazer population on the predator population. In the presence of delay, the critical value of delay for which stability change occurs is obtained. It is concluded from the analysis that as the catchability coefficient E increases without any limit then predator population goes to extinction.
Published in “International Journal of Mathematical Archive”, 2011, Vol.2, No.11, pp. 2119-2134, ISSN 2229-5046. 55