ECE 477 Digital Systems Senior Design Project Rev 8/12
Homework 0: Team Building and Project Idea
Team # __7_ Proposed Project Name: ______
Team Members (#1 is Team Leader):
#1: Eric Osborne_____ Areas of Expertise: Analog, hardware design, power______
#2: Bryan Dallas_____ Areas of Expertise: Digital hardware design______
#3: Andrew Loveless_ Areas of Expertise: Microcontroller/microprocessor interfacing
#4: Caroline Trippel__ Areas of Expertise: Software design______
Project Idea #1:
The goal of this project is to design and construct a robot to traverse a maze while identifying various locations in a specified order with the use of the Texas Instruments MSP430 microcontroller. The maze will be constructed of an arrangement of blocks, and the locations to be found by the robot will be marked by LEDs varying in color, placed on the inside surface of the maze walls. While traversing the maze, the robot will be given an order in which to find these LEDs. If one is encountered out of order, the location within the maze will be recorded and the robot will move on. The robot will consist of a simple body on three wheels with various sensors to aid in movement, hit detection, and finding the specified locations in the correct order. Color- sensitive light sensors will be used to determine when a target location (LED) has been reached. If the target location is found in the correct order, a light of the same color located on the robot will turn on, indicating that the robot has visited this location. If the target location is found at an incorrect time, the corresponding light on the robot will remain off and the robot will continue traversing the maze, revisiting this location later. In addition to finding these locations, the robot will be constructing a map of the maze. A laser will be used to precisely measure the length of hallways and accurately construct the map. This map will allow the robot to intelligently traverse the maze in the future and will have the ability to be uploaded to a computer. Proximity sensors will be used to align the robot at 90 degree angles to the maze walls and prevent the robot from hitting walls. Analog, hardware design, and power skills (Eric) and digital hardware design (Bryan) will be used for choosing proper parts, determining power requirements for parts, and interfacing them to the microcontroller. Microcontroller/microprocessor interfacing (Andrew) and software design (Caroline) will be used for implementing maze traversal logic and utilizing peripherals.
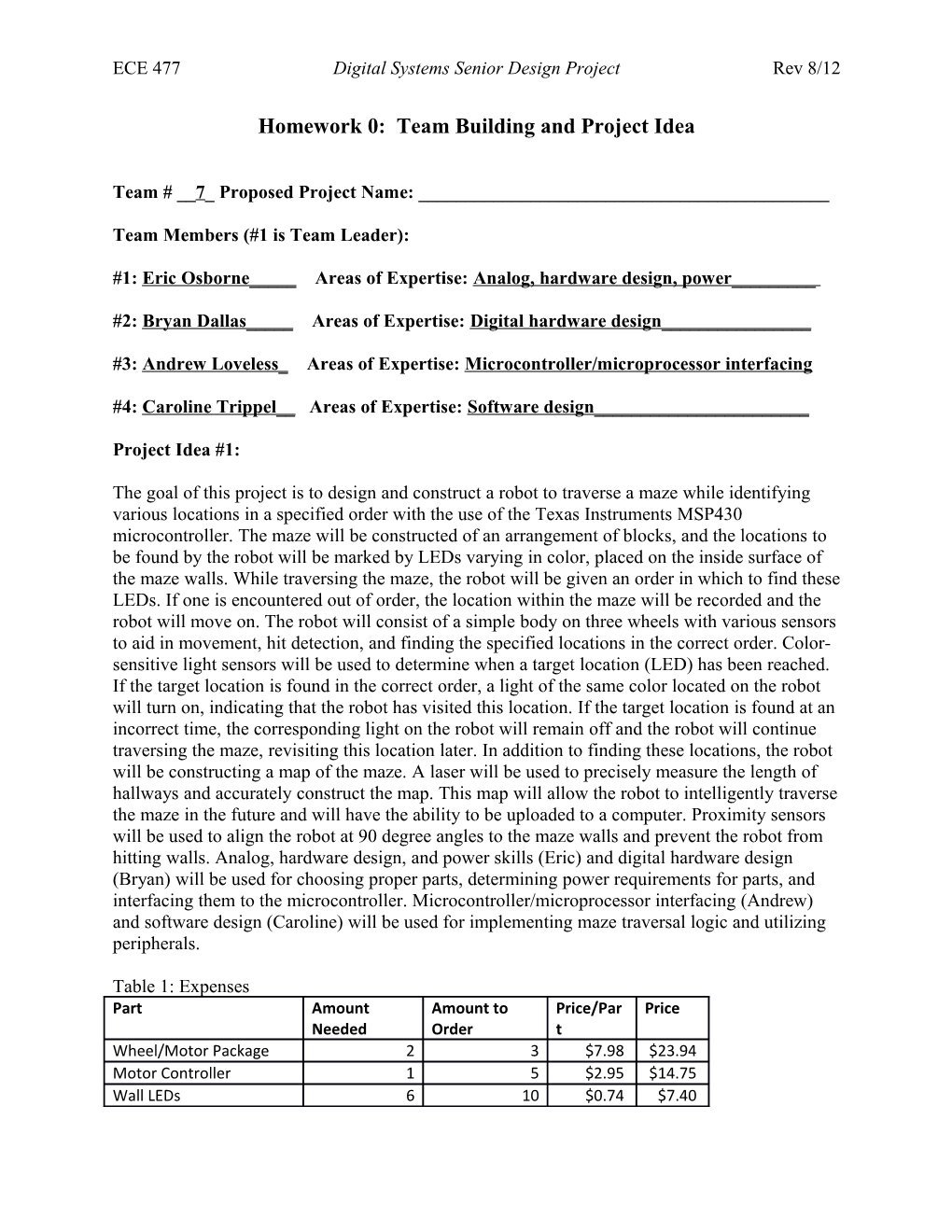
Table 1: Expenses Part Amount Amount to Price/Par Price Needed Order t Wheel/Motor Package 2 3 $7.98 $23.94 Motor Controller 1 5 $2.95 $14.75 Wall LEDs 6 10 $0.74 $7.40 ECE 477 Digital Systems Senior Design Project Rev 8/12
Robot LEDs 4 10 $0.74 $7.40 Light Sensor 1 2 $14.95 $29.90 Proximity Sensor 3 6 $10.25 $61.50 Proximity Laser (long 1 2 $14.95 $29.90 range) Battery Holder 2 2 $1.50 $3.00 Total Price $177.7 9