Homework: 9/21 13.1
16. Draw the projection of the curve on the three coordinate planes. Use these projections to help sketch the curve.
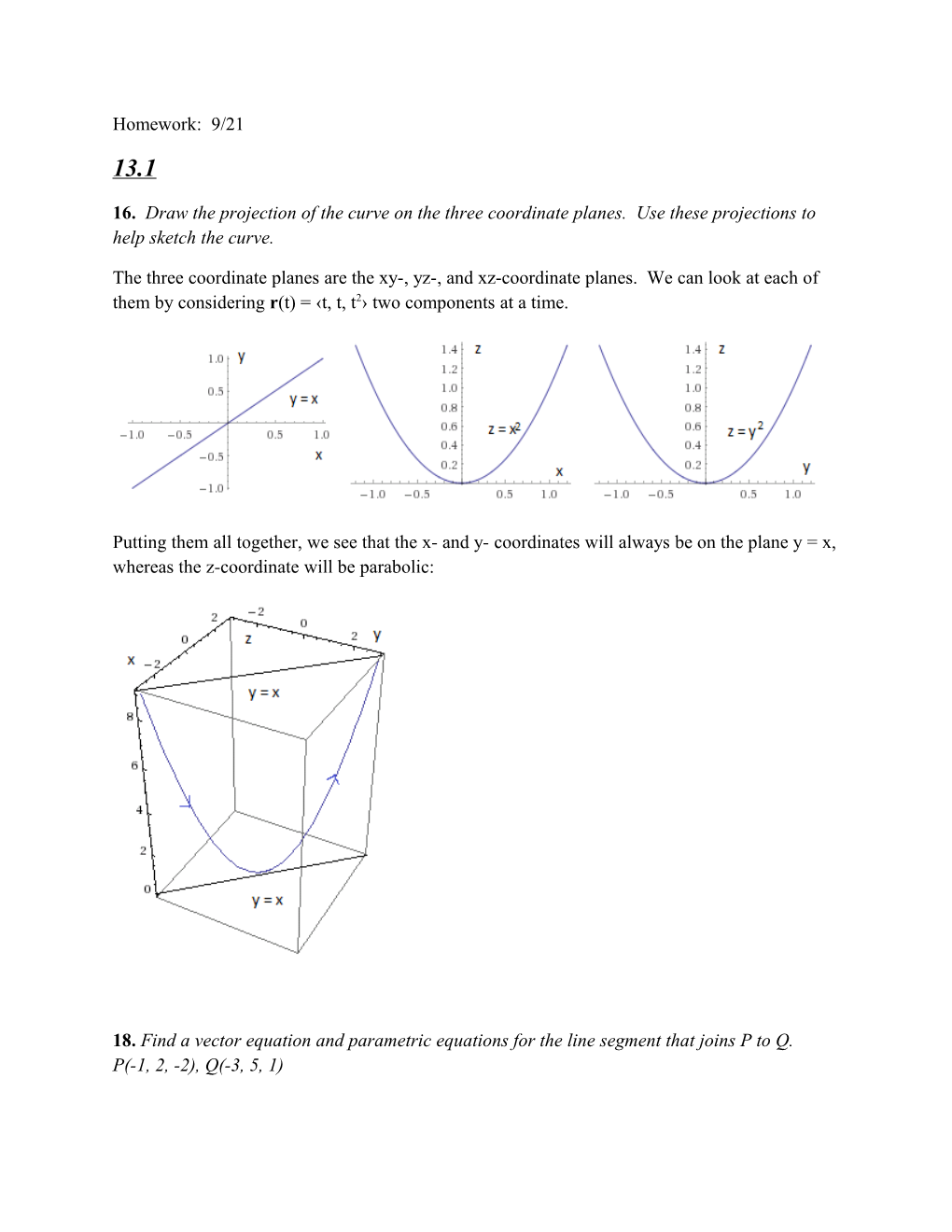
The three coordinate planes are the xy-, yz-, and xz-coordinate planes. We can look at each of them by considering r(t) = ‹t, t, t2› two components at a time.
Putting them all together, we see that the x- and y- coordinates will always be on the plane y = x, whereas the z-coordinate will be parabolic:
18. Find a vector equation and parametric equations for the line segment that joins P to Q. P(-1, 2, -2), Q(-3, 5, 1) In order to define a line, we require its direction and a point on the line (or two points, but basically the same). We know that our line must go through P and Q, so let us say that the point on the line is P. For the direction, we look for the vector that goes from P to Q; namely PQ.
PQ = <-3 – (-1), 5 – 2, 1 – (-2)> = <-2, 3, 3>. Therefore, we set up a parameter “t” to help us define this as direction: <-1, 2, -2> + t*<-2, 3, 3> = <-1 – 2t, 2 + 3t, -2 + 3t> = r(t). That is, we start at <-1, 2, -2> and then span in the direction (or opposite direction) of <-2, 3, 3>.
However, the question asked for the line segment, and so we must bound our “t”. Since we start at <-1, 2, -2>, and the segment has to reach and stop at <-3, 5, 1>, by our construction we can test/see/know that we should bound t as follows: 0 ≤ t ≤ 1.
The parameterization, taking each component one at a time, is: x(t) = 1 – 2t y(t) = 2 + 3t z(t) = -2 + 3t
OR
Let’s start by saying we’re going to draw a line between points P and Q, and it will be represented by r(t). Also, let’s establish that we’ll use a variable “t” as a parameter to help us define this line, and for simplicity, restrict it between 0 and 1. Because we want r(t) to equal r0 when t = 0, (at the start) and r1 when t = 1, (at the end) we construct the general equation r(t) =
(1 – t)r0+ tr1. Then we set P = r0 and Q = r1, and the result is r(t) = <-1 -2t, 2 + 3t, -2 + 3t>, where 0 ≤ t ≤ 1.
The parameterization, taking each component at a time, is: x(t) = 1 – 2t y(t) = 2 + 3t z(t) = -2 + 3t
28. Show that the curve with parametric equations x = sin t, y = cos t, z = sin2 t is the curve of the intersection of the surfaces z = x2 and x2 + y2 = 1. Use this fact to help sketch the curve.
First let us understand that the surfaces z = x2 and x2 + y2 = 1 have some intersection (which might be empty). All we have to do is show that the parametric equations provided will contain all those points of intersection. So for every point of intersection, the z-coordinate will equal the value of the x-coordinate squared, and the x-coordinate squared summed with the y-coordinate squared will equal 1. Do our parametric equations driven by our parameter “t” satisfy this? z = x2 z(t) vs. (x(t))2 sin2 t = (sin t)2 Yes, this is satisfied. x2 + y2 = 1 (x(t))2 + (y(t))2 vs. 1 sin2 t + cos2 t = 1 Yes, this is satisfied. Thus we conclude that the curve is in fact the intersection of the two surfaces. The simplest way to sketch this is to draw both surfaces, and then imagine where they intersect:
(Credit: math.ucla.edu; Ronald Miech)
(The intersection)
30. At what point does the helix r(t) = ‹sin t, cos t, t› intersect the sphere x2 + y2 + z2 = 5?
We can understand the vector function r(t)’s components separately: x = sin(t), y = cos(t), z = t. Because where the curve intersects the sphere their coordinates will be equal, we can expect that if we substitute our x-, y-, and z-values from r(t) into the equation for the sphere, the equation should still hold: (sin(t))2 + (cos(t))2 + (t)2 = 5 1 + t2 = 5 t2 = 4 t = ±2 Then we know that r(t) will intersect the sphere when t = -2, and t = 2. So to find these points, we substitute these values into our original equation: r(2) = ‹sin(2), cos(2), 2› r(-2) = ‹sin(-2), cos(-2), -2› (NB: the units for “t”, or lack thereof, implies radians)
(40. and 42.) Find a vector function that represents the curve of intersection of the two surfaces. (NB: You may use any parameterization that you wish; these are the ones I felt were simplest.)
40. The cylinder x2 + y2 = 4 and the surface z = xy.
Our vector function will be of the form r(t), so that means we’ll be using a parameter “t” as our only variable. That is, we must express x, y, and z in terms of t. Because we know an elegant parameterization for x2 + y2 = C in general, let us start from there: x(t) = 2cos(t), y(t) = 2sin(t). This satisfies the equation x2 + y2 = 4 (verify for yourself), and will reach all values of x and y if we bound 0 ≤ t ≤ 2π. Then the parameterization for z follows directly from the equation: z(t) = x(t)*y(t) = 4cos(t)sin(t) = 2sin(2t).
Thus our vector function can be written as r(t) = ‹2cos(t), 2sin(t), 2sin(2t)›, 0 ≤ t ≤ 2π.
42. The paraboloid z = 4x2 + y2 and the parabolic cylinder y = x2.
Our vector function will be of the form r(t), so that means we’ll be using a parameter “t” as our only variable. That is, we must express x, y, and z in terms of t. The second equation seems to offer a starting point, since that shows a simple relationship: x(t) = t, y(t) = t2. Then, we solve for z(t) by using x(t) and y(t): z(t) = 4t2 + t4.
Thus our vector function can be written as r(t) = ‹t, t2, 4t2 + t4›.
(NB: we do not have to bound our parameter in this problem, since a bound was not implied in the problem or by any of our functions)
47. If two objects travel through space along two different curves, it’s often important to know whether they will collide. The curves might intersect, but we need to know whether the objects are in the same position at the same time. Suppose the trajectories of two particles are given by the vector functions
2 2 2 r1(t) = ‹t , 7t – 12, t › r2(t) = ‹4t – 3, t , 5t – 6› for t ≥ 0. Do the particles collide? First, let us understand what’s happening. Two particles are going to fly through space independently of each other. If we try to trace out their paths, we might find that their paths intersect. However, this DOES NOT mean that they ever collid. After all, if you’re sitting in a chair in SMUD 205, and someone else sits in the same chair 2 hours later, you two do not necessarily collide at that point. Assuming you left, you two happened to occupy the same space but at different times. So, when we look for points of intersection for these two vector functions, we must check to see whether the functions attain the same value at the same value of t.
So let’s analyze intersection points. When r1(t) and r2(t) intersect, their x-, y-, and z-coordinates will be equal. Thus, we can equate them to find the values of t where this happens: x-coordinate: t2 = 4t – 3 t2 – 4t + 3 = 0 (t – 3)(t – 1) = 0 t = 1 or 3
At this point, we can check the other two coordinates and see which values of t are common to all three. However, we may also plug in our found values of t and see whether these work. If they do not, then we can conclude that there are no values of t where the two intersect, since there are only these two places where the x-coordinates are the same, at the same time t.
2 2 r1(1) = ‹(1) , 7(1) – 12, (1) › = ‹1, -5, 1› 2 r2(1) = ‹4(1) – 3, (1) , 5(1) – 6› = ‹1, 1, -1› Although they have the same x-coordinate at t = 1, their other coordinates do not match up. Thus, the curves do not intersect at t = 1. Next!
2 2 r1(3) = ‹(3) , 7(3) – 12, (3) › = ‹9, 9, 9› 2 r2(3) = ‹4(3) – 3, (3) , 5(3) – 6› = ‹9, 9, 9› Tada~ At the point t = 3, the two curves have the same coordinates, so they occupy the same space at the same time, and therefore they intersect (or are tangent). Thus, we can conclude that the particles do collide.
13.2
5. r(t) = sin(t)i + 2cos(t)j, t = π/4
5.a. Sketch the plane curve with the given vector equations.
We can test a few points to get an idea of what it looks like, but more likely we can recognize the equation as a “sort of” circle. Alternatively, we can directly see that it’s an ellipse. However you get there, here’s the sketch: Be careful that you recognize the direction that the curve is tracing. Because this is a parametric curve, there exists a distinct direction by which it traces its path, and this curve is different from the figure we get from tracing the curve in the opposite direction. We test for direction by trying a few points out. Also, it’s worth mentioning that we achieve the full curve on 0 ≤ t ≤ 2π
5.b. Find r’(t).
Straightforward component by component differentiation: r(t) = sin(t)i + 2cos(t)j r’(t) = cos(t)i + (-2)sin(t)j
5.c. Sketch the position vector r(t) and the tangent vector r’(t) for the given value of t.
To sketch the position vector, we first have to evaluate it: r(π/4) = sin(π/4)i + 2cos(π/4)j (1/√2)i + √2j
Be careful well looking for the tangent vector. They are not asking us to draw the position vector r’(t). Thus, we have to place it, correctly, tangent to the curve on the sketch. r’(π/4) = cos(π/4)i + (-2)sin(π/4)j (1/√2)i + -√2j 24. Find the parametric equations for the tangent line to the curve with the given parametric equations at the specified point. x = et, y = tet, z = tet^2; (1, 0, 0)
First, we must recognize that they are not asking us to find the parametric equations for the function that will give us the (direction of the) tangent line at any point. They are asking us to find the parametric equations that will describe the movement of a particular tangent line, at a particular point. So, they’re asking us to give the equation of a line (that is, the tangent line).
We can sufficiently describe a line with a point and a direction. Before we do either, let’s first consolidate the above parametric equations into a single vector equation: r(t) = ‹et, tet, tet^2›
Now, we should obtain the “point” that will describe the line. We are actually given a point, (1, 0, 0). But the problem with this is that if we’re going to go through the rest of this problem with a single function with common variable t, rather than three distinct functions, we have to describe x = 1, y = 0, z = 0, in terms of t. Looking at the first component, we see that this is only achievable when t = 0. So, we’re interested in the function at the point (1, 0, 0), or when t = 0; same thing. On to the direction. We can obtain a function which will give us the direction of the tangent line at any point by simply taking the derivative of our original: r(t) = ‹et, tet, tet^2› r’(t) = ‹et, et + tet, et^2 + et^2(t^2)’t› = ‹et, et + tet, et^2 + 2t2et^2›
So to find the “direction” that will describe the line we’re interested in, we use the point t = 0: r’(0) = ‹e0, e0 + 0*e0, e0^2 + 2(02)e0^2› ‹1, 1, 1› (since this will give us the tangent vector at the point t = 0)
Because we have our point and our direction, we can now compose our parametric function (with the idea that it will start at the point, and then span out in the direction): v(t) = r(0) + t*r’(0) ‹1, 0, 0› + t*‹1, 1, 1›
Or, in parametric terms: x(t) = 1 + t, y(t) = t, z(t) = t
27. Find a vector equation for the tangent line to the curve of intersection of the cylinders x2 + y2 = 25 and y2 + z2 = 20 at the point (3, 4, 2).
This turns into a very simple problem with multiple steps if we break down the question: 1) find a vector equation for the 2) tangent line to the curve of 3) intersection of the 4) cylinders x2 + y2 = 25 and y2 + z2 = 20 at the point (3, 4, 2)
So we want to find the vector equation for the tangent line. But the tangent line is tangent to the curve of the intersection. So we can’t find 1), or 2), until we find 3). Simple first question then: Describe the intersection of the cylinders x2 + y2 = 25 and y2 + z2 = 20 at the point (3, 4, 2).
You may do this part however you want, but it’s usually a good idea to represent x, y, and z in a reasonably clean way. One such way is x(t) = 5cos(t), y(t) = 5sin(t) (this satisfies the first cylinder). By the equation of the second cylinder, we solve for z(t) = √(20 – 25sin2(t)). Then our consolidated vector equation for this intersection of two cylinders is: r(t) = ‹5cos(t), 5sin(t), √(20 – 25sin2(t))›
Next step is to find the tangent line, and we describe a line with a point and a direction. We have the point though, (3, 4, 2), so all we need is the direction. The function r’(t) will give us the direction (and also magnitude though that’s not important to us) of the tangent vectors by nature of differentiation, so let’s find that: r’(t) = ‹-5sin(t), 5cos(t), -25sin(t)cos(t)/√(20 – 25sin2(t))›
Ah, but you see that our differentiated function is in terms of t. Yet, the point (3, 4, 2) is in terms of x-, y-, and z-coordinates. So, we have to find the appropriate t0 to get an appropriate r’(t): 2 r(t0) = ‹5cos(t0), 5sin(t0), √(20 – 25sin (t0))› = ‹3, 4, 2›
5cos(t0) = 3, 5sin(t0) = 4
cos(t0) = 3/5 sin(t0) = 4/5
I could solve for t0, and then I wouldn’t have to consider the equality from the y-coordinate, but this way is actually a little easier: 2 r’(t0) = ‹-5sin(t0), 5cos(t0), -25sin(t0)cos(t0)/√(20 – 25sin (t0))› = ‹-5(4/5), 5(3/5), -25(4/5)(3/5)/√(20 – 25(4/5)2)› = ‹-4, 3, -12/√(20 – 16) = ‹-4, 3, -6›
Because we have our point and our direction, we can now compose our vector function (with the idea that it will start at the point, and then span out in the direction): v(t) = r(0) + t*r’(0) = ‹3, 4, 2› + t*‹-4, 3, -6› = ‹3 – 4t, 4 + 3t, 2 – 6t›
32.a. Find the point of intersection of the tangent lines to the curve r(t) = ‹sin(πt), 2sin(πt), cos(πt)› at the points where t = 0 and t = 0.5.
This question can be broken down into first “finding” each of the tangent lines and then seeing where they intersect. So let’s find the tangent lines. To describe a line, we need a point and its direction, and the differentiated function r’(t) will give us a direction vector for the tangent line. The two tangent lines we’re analyzing are derived from the point t = 0, and t = 0.5. So, assembly line style: r(0) = ‹sin(π(0)), 2sin(π(0)), cos(π(0))› = ‹0, 0, 1› r’(0) = ‹πcos(π(0)), 2πcos(π(0)), -πsin(π(0))› = ‹π, 2π, 0› r(0.5) = ‹sin(π(0.5)), 2sin(π(0.5)), cos(π(0.5))› = ‹1, 2, 0› r’(0.5) = ‹πcos(π(0.5)), 2πcos(π(0.5)), -πsin(π(0.5))› = ‹0, 0, -π›
So we parameterize each tangent vector equation as follows: v(t) = r(0) + t*r’(0) = ‹0, 0, 1› + t*‹π, 2π, 0› = ‹πt, 2πt, 1› u(s) = r(0.5) + t*r’(0.5) = ‹1, 2, 0› + s*‹0, 0, -π› = ‹1, 2, -πs›
Be very careful. Each parametric function v(t) and u(s) operates completely apart from the other, so I have parameterized one with “t”, and the other with “s” to make this distinction clearer. To find where they intersect, we have to identify all coordinates that both functions pass through. By equating each component: πt = 1, 2πt = 2, 1 = -πs t = 1/π, t = 1/π, -1/π = s
Solving for t and s is a little unnecessary, but it does help to elucidate the point that v(t) and u(s) both, in their own time (v(t) when t = 1/π, u(s) when s = -1/π), go through the point (1, 2, 1).
32.b.
π/2 2 2 37. ʃ0 ( 3sin (t)cos(t)i + 3sin(t)cos (t)j + 2sin(t)cos(t)k)dt
Jumping right into it:
π/2 2 π/2 2 π/2 (ʃ0 3sin (t)cos(t)dt)i + (ʃ0 3cos (t)sin(t)dt)j + (ʃ0 2sin(t)cos(t)dt)k
Using the u-substitution method (u = sin(t), du = cos(t)dt; v = cos(t), dv = -sin(t)dt): 3 π/2 3 π/2 2 π/2 [sin (t)]0 i + [-cos (t)]0 j + [sin (t)]0 k (1 – 0)i + (0 + 1)j + (1 – 0)k = i + j + k
51. Show that if r is a vector function such that r’’ exists, then d/dt[r(t) × r’(t)] = r(t) × r’’(t)
We can brute force this proof by splitting r into components (of which there may or may not be 3, but since cross product for us has only been defined for 3-dimensional spaces, this is okay) and then actually finding the derivatives and the cross products. However, there’s a faster way.
Let’s start with the left side of the equation we want to prove. By theorem 3 part 5, we know that d/dt[u(t) × v(t)] = u’(t) × v(t) + u(t) × v’(t). So, if we let u(t) = r(t), and v(t) = r’(t), we get: r’(t) × r’(t) + r(t) × r’’(t)
However, we also know that if you take the cross product of any vector with itself, the result is 0 (the vector, not the number). So then we get: r(t) × r’’(t), which is the right side of the equation we want to prove.
Fast track: d/dt[r(t) × r’(t)] r’(t) × r’(t) + r(t) × r’’(t) [By theorem 3 part 5] r(t) × r’’(t) [u(t) × u(t) = 0 for any vector u(t)]
53. If r(t) ≠ 0, show that d/dt|r(t)| = (1/|r(t)|) r(t) • r’(t).
[Hint: |r(t)|2 = r(t) • r(t)]
Waste not want not: |r(t)|2 = r(t) • r(t) (1)
So, it doesn’t seem that the left side of (1) is similar to either side of the equality of what we want to prove, but nor is the right side. But if we had to choose, I mean, it seems like it’d take a few straightforward manipulations to get |r(t)|2 to look like d/dt|r(t)|; namely, square root, and then differentiation: |r(t)|2 = r(t) • r(t) |r(t)| = √(r(t) • r(t)) d/dt|r(t)| = d/dt√(r(t) • r(t)) (NB: We can take the square root of both sides because the dot product of any vector with itself is nonnegative, and the left hand side is in “absolute values”.)
So the left side is all taken care of. Now we have to get d/dt√(r(t) • r(t)) to turn into the expression (1/|r(t)|) r(t) • r’(t) somehow…. Well, let’s use our rules of differentiation (of dot products and chain rule) to work it out: d/dt√(r(t) • r(t)) = (1/2) (r(t) • r(t))-1/2 d/dt(r(t) • r(t)) = (1/2) (r(t) • r(t))-1/2 2(r(t) • r’(t)) = (r(t) • r(t))-1/2 r(t) • r’(t) So this is very promising. It seems the only part that doesn’t match up with the what we want is that (r(t) • r(t))-1/2 doesn’t seem to equal (1/|r(t)|)… or does it? Remember that |r(t)|2 = r(t) • r(t), so then (r(t) • r(t))1/2 should equal |r(t)|, and (r(t) • r(t))-1/2 = |r(t)|-1 = 1/|r(t)|.
Hooray we’re done!
Fast track:
|r(t)|2 = r(t) • r(t) (Given) |r(t)| = √(r(t) • r(t)) (Square root justified by nonnegativity of self dot product) d/dt|r(t)| = d/dt√(r(t) • r(t)) ~~~ d/dt√(r(t) • r(t)) (Consider just the right hand side) (1/2) (r(t) • r(t))-1/2 d/dt(r(t) • r(t)) (Chain rule) (r(t) • r(t))-1/2 r(t) • r’(t) (Chain rule) (1/|r(t)|) r(t) • r’(t) (By the given) ~~~ d/dt|r(t)| = (1/|r(t)|) r(t) • r’(t) (Substitution)
OR
|r(t)|2 = r(t) • r(t) (Given) d/dt(|r(t)|2) = d/dt(r(t) • r(t)) 2|r(t)| d/dt|r(t)| = 2(r(t) • r’(t)) (Chain rule) |r(t)|d/dt|r(t)| = r(t) • r’(t) d/dt|r(t)| = (1/|r(t)|) (r(t)•r’(t))
This way is much faster, but it takes a little intuition to see how it’ll work out.
(Disclaimer: this solution set is subject to typos or careless errors. I apologize in advance for any of those.)