2000, W. E. Haisler Mass Moment of Inertia 1 Mass Moment of Inertia Examples
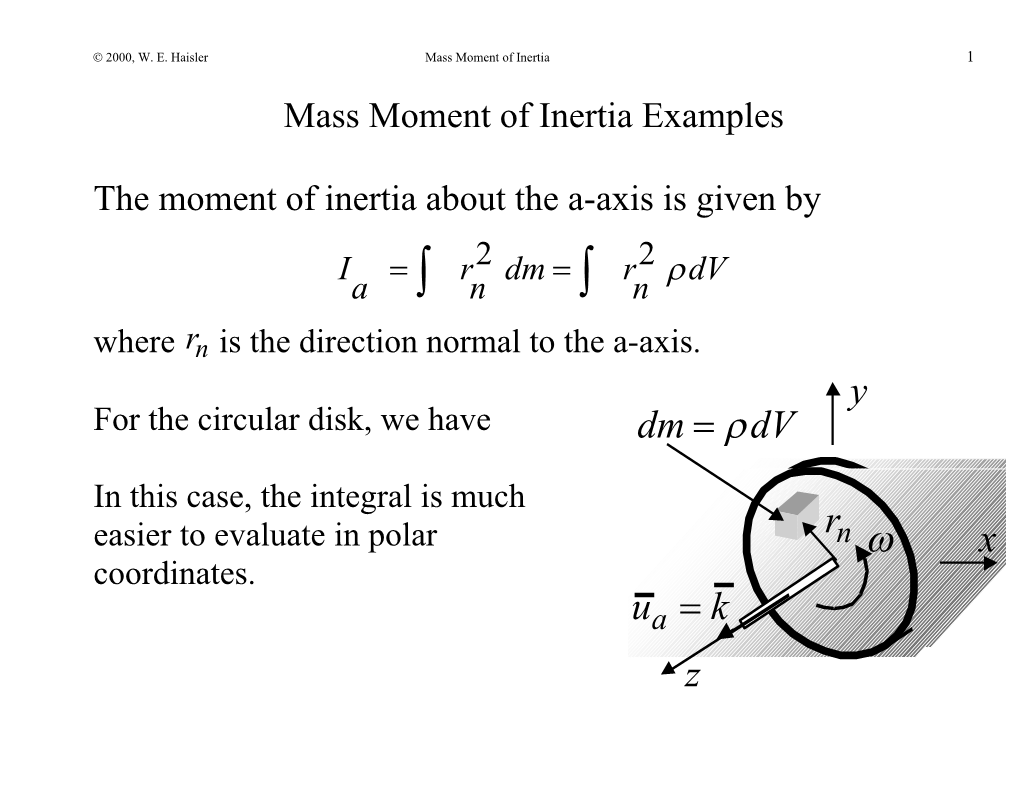
The moment of inertia about the a-axis is given by
I r2 dm r 2 dV a n n where rn is the direction normal to the a-axis. y For the circular disk, we have dm dV
In this case, the integral is much easier to evaluate in polar rn x coordinates. ua k z 2000, W. E. Haisler Mass Moment of Inertia 2
Example: Consider a circular cylinder of diameter D, length L, and mass m. z y dA=2rdr dV=dAdz
r x G y L z
x D
Show that Iz (about an axis parallel to the bar's length through G) 2 is given by: Iz = mD /8.
2 GI z r dm
We can write dm dV . In cylindrical coordinates, a volume element is given by dV dAdz rdrd dz rdr(2 ) L 2 Lrdr. 2000, W. E. Haisler Mass Moment of Inertia 3
The density is given by m/ V . The volume of the rod is 4m V AL ( D / 2)2 L. Thus the density is m/ V . D2 L The perpendicular distance from the z-axis to any point of the volume element is r. With this, the mass moment of inertia about the z-axis becomes
2D / 2 2 4m GI z r n dm r 2 Lrdr 0 D2 L D / 2 D / 2 4 8mr3 dr 8 m r 20 2 4 D D 0 mD2 /8 ( cylinder )
2 2 We can also show that GI y m(3 D / 4 L ) /12 ( cylinder ). 2000, W. E. Haisler Mass Moment of Inertia 4
Long, slender rod of length L z Suppose the diameter D of the cylinder is very small compared to its length L (D= L), i.e., a very slender rod of length L. G y L Using the results for a cylinder and letting D 0, we obtain: x B 2 Long Slender Rod GI z 0 and GI y mL/12 ( slender rod )
We could also derive GI y in the following way. dm If the rod has a mass of m and length of L, then dz the differential mass is given by dm=(m/L)dz. z Then G y L L/ 22 L / 2 2 2 I z dm z( m / L ) dz mL /12 x G y L/ 2 L / 2 B 2000, W. E. Haisler Mass Moment of Inertia 5
Moment of inertia about one end of slender rod: Suppose we wanted the mass moment of z inertia about a y-axis located at point B (the end of the rod). The last integral becomes: dz dm G L L L I z2 dm z 2( m / L ) dz mL 2 /3 z B y 0 0 y Notice: The moment of inertia about some x B point other then the center of mass will have a large value. In this case, the moment of inertia about B ( BI y ) is 4 times larger then the value about the center of mass G (GI y).
An easier way to obtain this is by using the parallel axis theorem discussed below. 2000, W. E. Haisler Mass Moment of Inertia 6
Suppose a mass of M is added to each end of the z slender rod.
B M For GI z, we assume that M is a point mass so that the result is the same as for a long slender I 0 rod, i.e., G z . G y L I For G y, we note that each lumped mass is x located a distance d=L/2 from G and has a M moment of inertia about G equal to 2 2 2 GI y r n dm d M ( L / 2) M . Since, moment of inertia is additive, we add the additional moment of inertia of the two lumped masses to the previous result to obtain:
I mL2 /12 ( L / 2) 2 M ( L / 2) 2 M mL 2 /12 ML 2 / 2 G y 2000, W. E. Haisler Mass Moment of Inertia 7
Parallel Axis Theorem Consider a plane body with the x-y Cartesian coordinate system located at the center of mass G as shown below. Consider another Cartesian coordinate system (x', y') located at B such that the x'-axis is parallel to the x-axis. The perpendicular distance between the two parallel axes is "d." Assume we know the mass moment of inertia about the x-axis (GI x) and wish to determine the moment of inertia about the parallel x'-axis (Ix'). y’ y y’ = y - d B x’ d x G 2000, W. E. Haisler Mass Moment of Inertia 8
We first note that the moment of intertia about the x-axis through 2 2 the center of gravity is given by GIx G r n dm y dm. Recall that rn is normal to the x-axis and is thus equal to y. We wish to obtain the moment of inertia about the parallel x'-axis through point B (i.e., about a parallel axis that is a distance d I ( y ')2 dm from the center of gravity G). This is given by x' . I We note that y' = y - d so that x' becomes 2 2 Ix' ( y ') dm ( y d ) dm y2 dm 2 y ( d ) dm d 2 dm
The first integral in the above equation is the moment of inertia 2 about the x-axis (through G): GI x y dm. For the middle integral, the constant 2d may be factored outside the integral so 2000, W. E. Haisler Mass Moment of Inertia 9 that it becomes 2d ( y ) dm 0. This integral is zero since y is measured from the center of mass. For the third integral, d is a constant so the integral becomes md 2. Thus we obtain
2 Ix' G I x md
This is called the parallel axis theorem or the transfer theorem. It allows one to transfer the moment of inertia about an axis through the center of gravity (the x-axis) to a parallel axis (the x- axis) that is a distance "d" from the center of gravity.
The parallel axis theorem applies to any two parallel axes so long as one of them passes through the center of mass. 2000, W. E. Haisler Mass Moment of Inertia y 10 x Two rigid slender bars and a disk 2 kg disk are used to make the rigid 1 kg O structure pinned at O. The 3 kg 2 m horizontal bar has a length of 3 2 m 1 m m and a mass of 1 kg; the 0.5 m vertical bar has a length of 2 m and a mass of 2 kg. The disk has a diameter of 0.5 m and a mass of 3 kg. Determine the mass moment of inertia about a z-axis through point O. 2 2 2 Disk: GI z mR/ 2 3 kg (0.5 m ) / 2 0.375 kgm 2 2 OI z mR/ 2 md thus, 3kg (0.5 m )2 / 2 3 kg (2.25 m ) 2 15.5625 kgm 2 Horizontal Rod: 2 2 2 2 2 OI z mL/12 md 1 kg (3 m ) /12 1 kg (0.5 m ) 1 kgm Vertical Rod: 2 2 2 2 2 OI z mL/12 md 2 kg (2 m ) /12 2 kg (1 m ) 2.667 kgm 2 Total: Summing the three components gives: OI z 19.229 kgm