1
Section 9.7/12.7: Triple Integrals in Cylindrical and Spherical Coordinates
Practice HW from Larson Textbook (not to hand in) Section 9.7: p. 606 # 1-35 odd Section 12.7: p. 780 # 1-4 , Supplemental Exercises at end of notes # 1-8
Cylindrical Coordinates
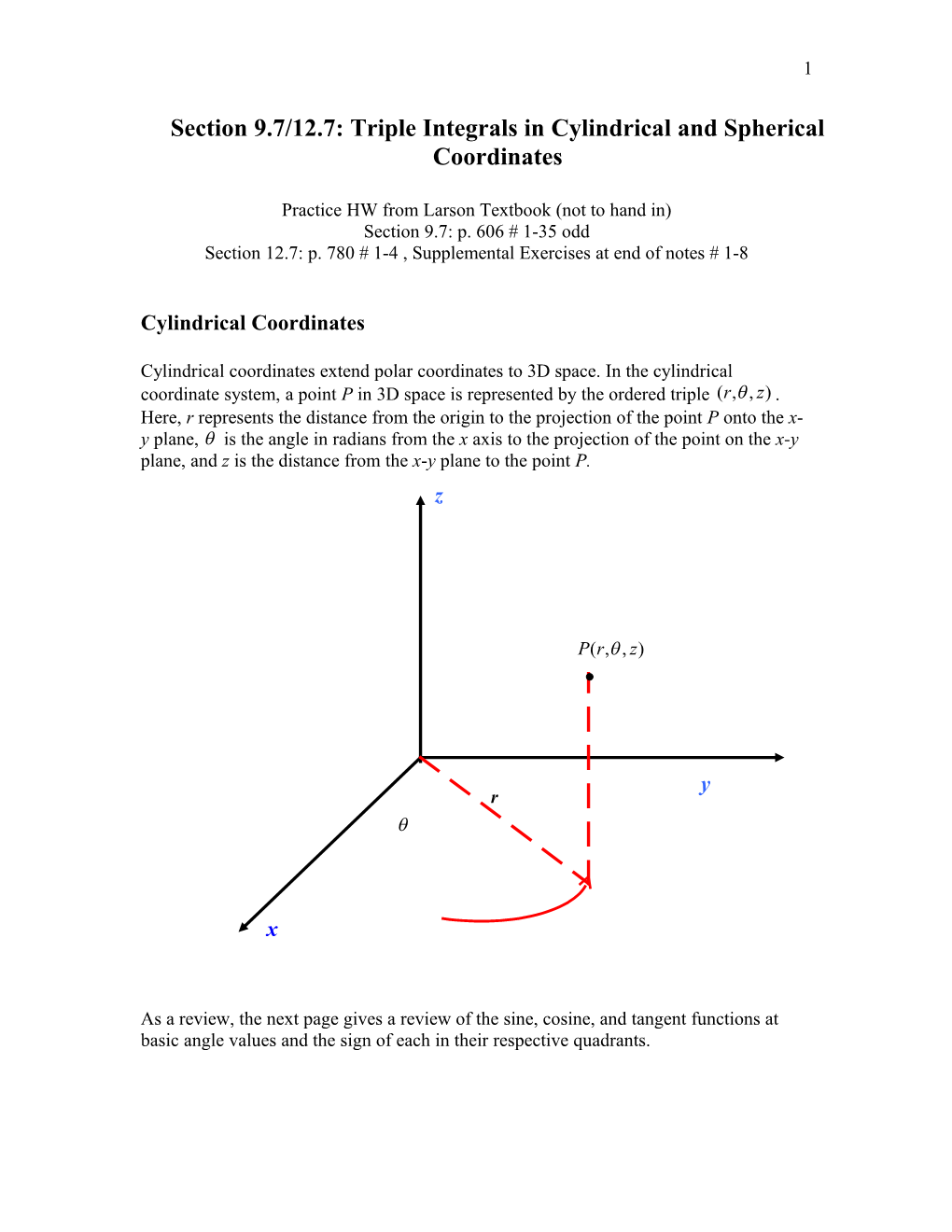
Cylindrical coordinates extend polar coordinates to 3D space. In the cylindrical coordinate system, a point P in 3D space is represented by the ordered triple (r,, z) . Here, r represents the distance from the origin to the projection of the point P onto the x- y plane, is the angle in radians from the x axis to the projection of the point on the x-y plane, and z is the distance from the x-y plane to the point P. z
P(r,, z)
y r
x
As a review, the next page gives a review of the sine, cosine, and tangent functions at basic angle values and the sign of each in their respective quadrants. 2
Sine and Cosine of Basic Angle Values
cos sin sin Degrees Radians tan cos 0 0 cos0 1 sin 0 0 0 30 3 1 3 6 2 2 3 45 2 2 1 4 2 2 60 1 3 3 3 2 2 90 0 1 undefined 2 180 -1 0 0 270 3 0 -1 undefined 2 360 2 1 0 0
Signs of Basic Trig Functions in Respective Quadrants
cos sin sin Quadrant tan cos I + + + II - + - III - - + IV + - -
The following represent the conversion equations from cylindrical to rectangular coordinates and vice versa.
Conversion Formulas
To convert from cylindrical coordinates (r,, z) to rectangular form (x, y, z) and vise versa, we use the following conversion equations.
From cylindrical to rectangular form: x r cos , y r sin , z = z.
y From rectangular to cylindrical form: r 2 x2 y 2 , tan , and z = z x 3
Example 1: Convert the points ( 2, 2,3) and (3, 3,1) from rectangular to cylindrical coordinates.
Solution: 4
█ 5
Example 2: Convert the point (3, ,1) from cylindrical to rectangular coordinates. 4
Solution:
█
Graphing in Cylindrical Coordinates
Cylindrical coordinates are good for graphing surfaces of revolution where the z axis is the axis of symmetry. One method for graphing a cylindrical equation is to convert the equation and graph the resulting 3D surface. 6
Example 3: Identify and make a rough sketch of the equation z r 2 .
Solution:
z
y
x █
Example 4: Identify and make a rough sketch of the equation . 4
Solution:
z
y
█ x 7
Spherical Coordinates
Spherical coordinates represents points from a spherical “global” perspective. They are good for graphing surfaces in space that have a point or center of symmetry.
Points in spherical coordinates are represented by the ordered triple
(,,) where is the distance from the point to the origin O, , where is the angle in radians from the x axis to the projection of the point on the x-y plane (same as cylindrical coordinates), and is the angle between the positive z axis and the line segment OP joining the origin and the point P (,,) . Note 0 .
z
P(,,)
y
x 8
Conversion Formulas
To convert from spherical coordinates (,,) to rectangular form (x, y, z) and vise versa, we use the following conversion equations.
From spherical to rectangular form: x sin cos , y sin sin , z cos y From rectangular to spherical form: 2 x2 y 2 z 2 , tan , and x z z arccos( ) arccos( ) x2 y 2 z 2
Example 5: Convert the points (1, 1, 1) and (3, 3,2 2) from rectangular to spherical coordinates.
Solution: 9
█ 10
Example 6: Convert the point (9, , ) from rectangular to spherical coordinates. 4
Solution:
█
Example 7: Convert the equation 2sec to rectangular coordinates.
Solution:
█ 11
Example 8: Convert the equation to rectangular coordinates. 3
z Solution: For this problem, we use the equation arccos( ) . If we take x2 y 2 z 2 the cosine of both sides of the this equation, this is equivalent to the equation
z cos x2 y 2 z 2 Setting gives 3 z cos . 3 x2 y 2 z 2
1 Since cos , this gives 3 2
1 z 2 x 2 y 2 z 2 or
x2 y 2 z 2 2z
Hence, x2 y 2 z 2 2z is the equation in rectangular coordinates. Doing some algebra will help us see what type of graph this gives.
Squaring both sides gives
x2 y 2 z 2 (2z)2 2 2 2 2 x y z 4z The graph of x2 y 2 3z 2 0 x2 y 2 3z 2 0 is a cone shape half whose two parts be found by graphing the two equations x2 y 2 z 2 2z . The graph of the top part, x2 y 2 z 2 2z , is displayed as follows on the next page.
(continued on next page) 12
█
Example 9: Convert the equation x2 y 2 z to cylindrical coordinates and spherical coordinates.
Solution: For cylindrical coordinates, we know that r 2 x2 y 2 . Hence, we have r 2 z or r z
For spherical coordinates, we let x sin cos , y sin sin , and z cos to obtain
( sin cos )2 ( sin sin )2 cos
We solve for using the following steps:
2 sin 2 cos2 2 sin 2 sin 2 cos (Square terms) 2 sin 2 (cos2 sin 2 ) cos (Factor 2 sin 2 ) 2 sin 2 (1) cos 0 (Use identity cos2 sin 2 1) ( sin 2 cos) 0 (Factor ) 0, sin 2 cos 0 (Set each factor equal to zero and solve) cos 0, sin 2 █ Triple Integrals in Cylindrical Coordinates 13
Suppose we are given a continuous function of three variables f (r,, z) expressed over a solid region E in 3D where we use the cylindrical coordinate system.
z
z h2 (r, )
E y r g2 ( ) z h (r, ) 1 1 2
r g1( ) x
Then
2 rg2 ( ) zh2 (r, ) f (r,, z) dV f (r,, z) r dz dr d E 1 rg1( ) zh1(r, )
2 rg2 ( ) zh2 (r, ) Volume of E dV r dz dr d E 1 rg1( ) zh1(r, ) 14
3 2 Example 10: Use cylindrical coordinates to evaluate (x xy ) dV , where E is the E solid in the first octant that lies beneath the paraboloid z 1 x2 y 2 .
Solution: 15
█ 16
Example 11: Use cylindrical coordinates to find the volume of the solid that lies both within the cylinder x2 y 2 4 and the sphere x2 y 2 z 2 9 .
Solution: Using Maple, we can produce the following graph that represents this solid:
In this graph, the shaft of the solid is represented by the cylinder equation x2 y 2 4 . It is capped on the top and bottom by the sphere x2 y 2 z 2 9 . Solving for z, the upper and bottom portions of the sphere can be represented by the equations z 9 x2 y 2 . Thus, z ranges from z 9 x2 y 2 to z 9 x2 y 2 . Since x2 y 2 r 2 in cylindrical coordinates, these limits become z 9 r 2 to z 9 r 2 .When this surface is projected onto the x-y plane, it is represented by the circle x2 y 2 4 . The graph is
(Continued on next page) 17
This is a circle of radius 2. Thus, in cylindrical coordinates, this circle can be represented from r = 0 to r = 2 and from 0 to 2 . Thus, the volume can be represented by the following integral: 2 2 rg2 ( ) zh2 (r, ) 2 r2 z 9r Volume dV r dz dr d r dz dr d E 1 rg1( ) zh1(r, ) 0 r0 z 9r2
We evaluate this integral as follows: 2 2 r2 z 9r2 2 r2 z 9r r dz dr d rz dr d 2 0 r0 z 9r2 0 r0 z 9r 2 r2 r( 9 r 2 ) r( 9 r 2 ) dr d 0 r0 2 r2 2r 9 r 2 dr d 0 r0 r2 2 3 2 2 (9 r 2 ) d (Use u - du sub let u 9 - r 2 ) 3 0 r0 2 3 3 2 2 2 2 [ (9 22 ) (9 02 ) ] d 3 3 0 2 3 3 2 2 2 2 [ (5) (9) ] d 3 3 0 2 3 3 10 2 2 [18 5] d (Note (9) 27 and (5) 5 5) 3 0 10 2 [18 5] 3 0 10 (18 5)2 0 3 20 36 5 3
20 Thus, the volume is 36 5 . 3
█ 18
Triple Integrals in Spherical Coordinates
Suppose we have a continuous function f (,, ) defined on a bounded solid region E.
z
P(,,)
y
x
Then
2 2 h2 (, ) f (,, ) dV f (,, ) 2sin d d d E 1 1 h1(, )
2 2 h2 (, ) Volume of E dV 2sin d d d E 1 1 h1(, ) 19
x 2 y 2 z 2 Example 12: Use spherical coordinates to evaluate e dV , where Q is Q enclosed by the sphere x2 y 2 z 2 9 in the first octant.
Solution: 20
█ 21
2 2 2 16x2 16x y Example 13: Convert x 2 y 2 dz dy dx from rectangular to 2 0 0 spherical coordinates and evaluate.
Solution: Using the identities x sin cos and y sin sin , the integrand becomes
x2 y 2 2 sin 2 cos2 2 sin 2 sin 2
2 sin 2 (cos2 sin 2 )
2 sin 2 (1) sin
The limits with respect to z range from z = 0 to z 16 x2 y 2 . Note that z 16 x2 y 2 is a hemisphere and is the upper half of the sphere x2 y 2 z 2 16 . The limits with respect to y range from y = 0 to y 16 x2 , which is the semicircle located on the positive part of the y axis on the x-y plane of the circle x2 y 2 16 as x ranges from x 4 to x 4 . Hence, the region described by these limits is given by the following graph
Thus, we can see that ranges from 0 to 4 , ranges from 0 to and 2 ranges from 0 to . Using these results, the integral can be evaluated in polar coordinates as follows:
(continued on next page) 22
2 2 4 16 x 2 16 x y x2 y2 dz dy dx 4 0 0 2 4 sin ( 2 sin) d d d 0 0 0 2 4 3 sin2 d d d 0 0 0 4 2 4 sin2 d d (Integrate with respect to ) 4 0 0 0 2 44 2 [ sin2 0]d d 64 sin2 d d (Sub in limits and simplify) 4 0 0 0 0 2 1 cos 2 1 cos 2u 64 d d (Use trig identity sin2 u ) 2 2 0 0 2 2 32(1 cos 2) d d ( 32 32 cos 2 )d d (Simplify and dist 32) 0 0 0 0 1 2 ( 32 32( )sin 2 ) (Integrate with respect to , use u - du sub for cos2) 2 0 0 2 ( 32 16sin 2 ) d [32 16sin 2( ) ] (32(0) 16sin 0) d 2 2 0 0 0 (16 16sin 0)d (16 16(0) )d 0 0 16 d 16 (Integrate with respect to ) 0 0 16 ( ) 0 16 2 █ 23
Supplemental Exercises
2 2 1. Use cylindrical coordinates to evaluate x y dV , where Q is the region that Q lies inside the cylinder x2 y2 16 and between the planes z 5 and z 4 . (Answer 384 )
ez dV 2. Use cylindrical coordinates to evaluate , where Q is the region enclosed by Q the paraboloid z 1 x2 y2 , cylinder x2 y2 5, and the x-y plane. (Answer (e6 e 5) )
3. Find the volume of the region Q bounded by the paraboloids z x2 y2 and z 36 3x2 3y2 . (Answer 162 )
(x2 y2 z2 ) dV 4. Use spherical coordinates to evaluate , where Q is the unit ball Q 4 x2 y2 z2 1 . (Answer ) 5
z dV 5. Use spherical coordinates to evaluate , where Q lies between the spheres Q 15 x2 y2 z2 1 and x2 y2 z2 4 in the first octant. (Answer ) 16
x2 dV 6. Use spherical coordinates to evaluate , where Q is bounded by the xy-plane Q 1562 and the hemispheres z 9 x2 y2 and z 16 x2 y2 . (Answer ) 15
2 2 4 y 2 7. Evaluate the integral xz dz dx dy by changing to cylindrical 2 4 y 2 x 2 y 2 coordinates. (Answer 0) 2 2 1 1 x 2 2 x y 8. Evaluate the integral xy dz dy dx by changing to cylindrical 0 0 x 2 y 2 coordinates. (Answer (4 2 5) /15)