48650 Mechanical and Manufacturing Design (HK) Week 2 2004
1. Introduction: This section is about threaded fasteners and power screws. Their theory derives from the theory of the inclined plane and they were regarded by Archimedes as the circular analogy of the inclined plane. There is a large variety of threaded forms and descriptions: square threads, those based triangular form, single start, multiple start, parallel, tapered etc…. The theory of threads is based on the lead (or helix) angle and the frictional properties of the matching internal and external threads and other rubbing surfaces.
2. Introduction to Juvinall Chapter 10 and Thread Terminology: Read sections 10.1 and 10.2 of Juvinall. Note how widely screw fasteners and power screws are used in engineering and note the various forms of both American and ISO Metric screw threads. Note also the definitions of screw pitch (p), lead (L), lead angle (λ) and hand of thread.
3. Power Screws: Read section 10.3 of Juvinall, particularly study problem 10.1. Also study the design problem below. This is an example of a realistic design problem:
Power Screw Design Problem:
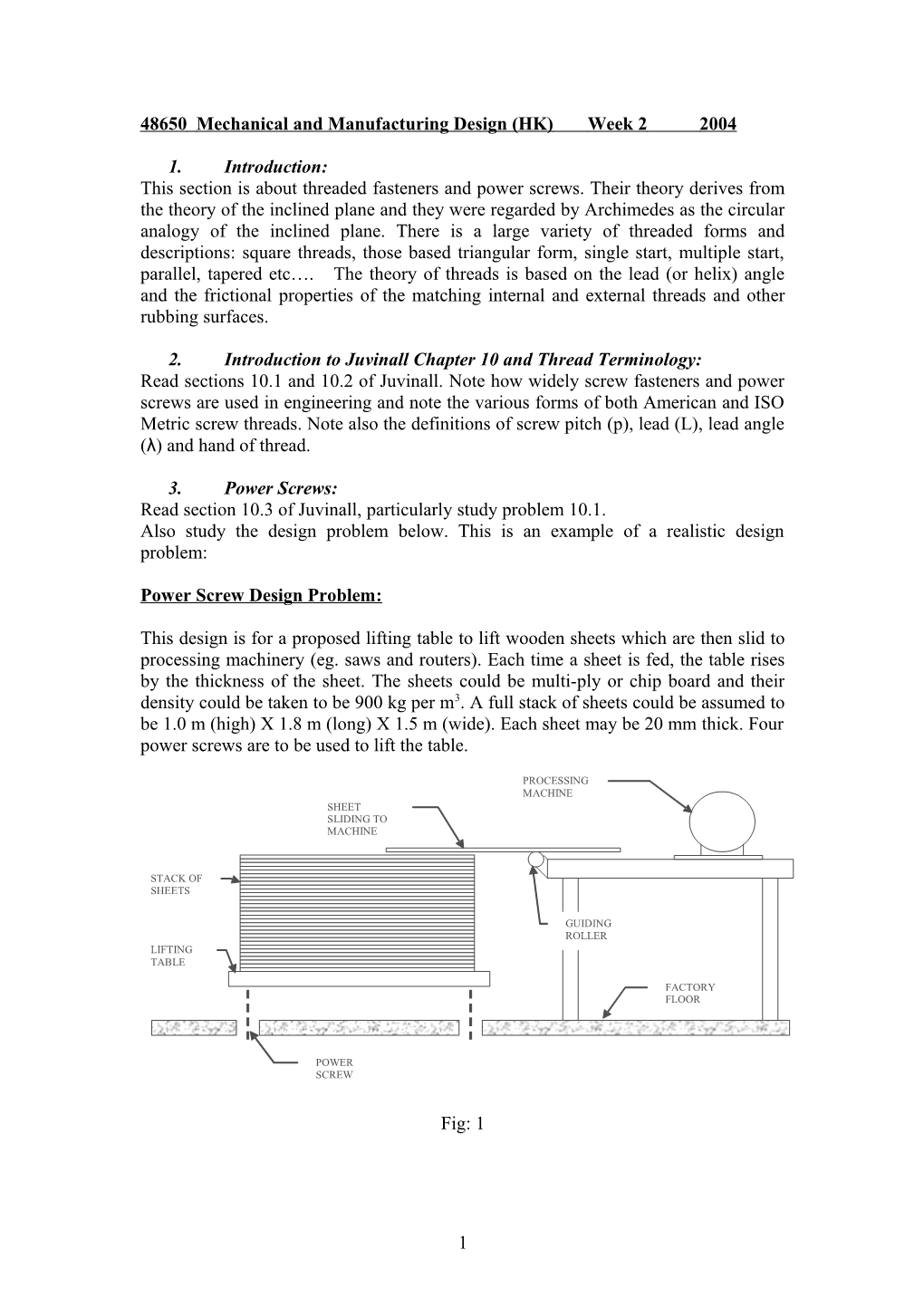
This design is for a proposed lifting table to lift wooden sheets which are then slid to processing machinery (eg. saws and routers). Each time a sheet is fed, the table rises by the thickness of the sheet. The sheets could be multi-ply or chip board and their density could be taken to be 900 kg per m3. A full stack of sheets could be assumed to be 1.0 m (high) X 1.8 m (long) X 1.5 m (wide). Each sheet may be 20 mm thick. Four power screws are to be used to lift the table.
PROCESSING MACHINE SHEET SLIDING TO MACHINE
STACK OF SHEETS
GUIDING ROLLER LIFTING TABLE
FACTORY FLOOR
POWER SCREW
Fig: 1
1 For detail system configuration and further information, please refer to the following web sites: The pdf files listed below provide the technical data from the manufacturers for the screw designed in this problem. Students are advised to compare and study the design presented here with that from the manufacturers and see whether the design presented here agrees what manufacturers have presented. Figures 2 and 3 are taken from the website 2 and 3 and figure 4 is taken from website 1.
1. www.joycedayton.com/jacks
2. http://mdmetric.com/prod/pti/Rhino.pdf
3. http://mdmetric.com/prod/pti/Muli.pdf
Fig: 2
2 Fig: 3
Fig: 4
3 Screw jacks can be used in different configurations for lifting, positioning and clamping applications. The figure 4 shows the arrangement with different configurations. In this problem we choose system H because it provides balanced loading in all the four points. In this application the arrangement H is used to lift and hold a stack of wooden sheets and each time a sheet slides out of the stack, the actuator moves up the thickness of a sheet to a new position level with the roller guide.
Figures 2 and 3 show the screws in a horizontal position. For this application assume it to be vertical with a nut in it. In this application the power screw is called screw jack as it is used for lifting and levelling. The nut rotates in place and screw moves axially. The figure also shows a worm gear, where the gear teeth are cut on outside of the nut. The screw movement can be restricted by having limit switches. As most power screws are self locking, an axial force on the screw causes sufficient friction to lock it, without the need for a brake. The nut and screw threads slide directly on one another in ordinary power screws. These power screws are mostly self locking.
When fully loaded, the table can hold 50 boards, which may be required to be raised in 30 sec. Assume there is a work bench above the system where the boards are lifted from the base up to the level of the work bench. The proposed design is shown in the figure 1.
The screw thread used is a modified square with thread angle α of 50 and has a diameter of 25.4 mm (1 inch) with 4 threads per inch. (Refer to Marks Standard Handbook for Mechanical Engineers, 10th edition, page 8-17, table 8.2.9 and figure 8.2.5, also refer to Juvinall, page 400, table 10.3)
Neglect the buckling effect as the screw is raised higher the boards are removed one by one. When it reaches at the top position there is no load except it self load.
The nut material is bronze and screw material is alloy steel with following mechanical properties.
Table 1
Density 7700 – 8030 kg/m3 Poisson’s Ratio 0.27 – 0.30 Elastic Modulus 190 – 210 GPa Tensile Strength 689.5 MPa Yield Strength 422.6 MPa Elongation (%) 24.5
Source: http://www.efunda.com/materials/alloys/alloy_steels
Calculate the followings
1. Torque required to raise the load 2. Check under combined stress and determine factor of safety 3. Power requirements
4 4. Calculate efficiency and compare with the fig. 10.8, page 406 (Juvinall) 5. Comment on self locking.
Solution:
The weight on top of four screws is given by
Weight(W ) desnity Volume 9.81 50 900 0.054 9.81 23.84kN
Assume the weight of the steel structure on top of screws supporting the wooden sheets is 6.16 kN
Therefore the total load (W) = 30 kN on top of the four screws
1. The screw torque for a square thread is given by:
Wd f cos tan T m n ------1 4 2 cos n f tan
W W = 30 kN. For single thread assuming the load is evenly distributed would be 4 that is 7.5 kN
Height of the thread is h 0.1250in
dm 1 h 1 0.125 0.875in 22.23mm
For a modified square thread the angle Cos n is almost equal to 1. Referring to the thread profile the angle is 50.
So, Cos n = 0.9962 L 6.23 The Frictional coefficient is given by f tan 0.09093 dm 22.23 Lead angle is given by tan 0.09093 tan 1 (0.09093) 5.20
With this helix angle, let us assume the frictional coefficient of the screw is 0.15, as shown in the figure 10.8 of the text (Juvinall), on page 406. f 0.15
5 Substituting all these values in equation 1, we can calculate the torque required to raise the load.
30 22.23 0.15 0.9962 0.09093 T 4 2 0.9962 0.15 0.09093
T = 20.412 Nm.
2. Checking under combined stress and factor of safety:
Referring to the material properties in Table 1, we know the Yield strength of the given screw thread is Sy = 422.6 MPa.
S y FS 2 2 ------2 T 2 2
Use the following equation to calculate the normal stress for column.
W 1 T ------3 4A 2 L S y 1 4k 2 E t
W = 30 kN, since there are four screws we divide the load by 4. Which is the denominator in equation 3. di = 19.05
2 di 2 A 285.023mm , Where di is the internal diameter 4
Sy = 422.6 MPa (Table 1)
L = 20 mm (Linear distance moved)
6 Radius if gyration is given by
d i 71.256mm 4 kt = 3, end constant for the column
E = 210 GPa (Table 1)
Substituting these values in equation 3 we get
30103 1 T 4 2 4 2.8502310 20 422.6106 71.256 1 2 9 4 3 21010
T 19.5MPa
The shear stress is given by:
Tc ------4 J
Where c is the distance from the neutral axis to the extreme fibre
J d 3 i 1357.422mm3 c 16 c 7.3669105 m3 J
Substituting these values in equation 4, we get
20.412 7.3669105 = 15.04 MPa
Thus solving for factor of safety, from equation 2 we get
7 422.6 FS 2 11.8 2 19.5 15.042 2
Comment: The factor of safety is too high. The reason for high factor of safety is for stability. As this is only a proposed design, in real application scissors type lifting devices are used mainly for the reason for stability. As this is only supported at the base it does not have much stability against lateral loading, so high factor of safety is sometimes desirable. In normal practice a factor of safety of 2-3 is used. Higher the factor of safety higher the cost involved.
3. Power Requirements
The linear velocity of the screw is given by
V 1/ 30 0.0333m / sec
Angular velocity is given by
V / R
R is the radius of the screw
R = 12.7 mm = 0.0127 m
0.0333 0.0127
2.625rev / sec
Power is given by,
P T 20.412 2.625 53.6Watts
Very low power requirement. We have not considered the frictional losses at each link and in the gear box. If this is taken into account the power requirement would be little higher than calculated as above.
4. Efficiency of the thread is given by
1 f tan 1 0.15 0.09093 e 37.2% 1 f cot 0.15 1 0.09093
8 Compare this efficiency with the figure 10.8 page 406 (Juvinall). With the helix angle and the chosen friction 0.15 the efficiency is close to our initial assumption.
5. Self Locking:
The screw will be self locking if the friction factor is greater or equal to tangent of helix angle. In this case the friction factor is 0.15 and the tangent of the helix angle is 0.09093. This tangent of helix angle is less than the friction factor, so this is a self locking screw.
In other words a self locking screw requires some torque to lower the load. Sometimes a screw is self locking under static conditions but sometimes under vibration it tends to loosen and in such cases a locking device is provided to prevent it from loosening.
6. Final comment:
The system investigated above would be laterally weak with the screws fully extended. For this reason a “scissor lift table” would be preferable. See figure 5 below and refer to http://www.omni.com/downloads/pdf/sect-12-hydraulicscissorlift.pdf
Fig 5
Now try student problems 10.1 and 10.9 from Juvinall. Check your answers in the student solutions.
9 48650 Mechanical and Manufacturing Design (HK) Week 3 2004
4. Introduction: This section is about the design of strings. Their theory derives from the theory of the elasticity of materials and machine members. There is a large variety of spring forms: - coil springs, both compression type and tension type, leaf springs, torsion springs… to name a few. Sometimes blocks of rubber are used as springs. A variety of metals such as oil tempered carbon steel, music wire, stainless steel and many others are used in manufacturing springs.
5. Introduction to Juvinall Chapter 12 - Springs: Read sections 12.1 and 12.2 of Juvinall. Note the definition of what a spring is and note that we concentrate on springs made of solid metals. Note also the concept of torsion springs – this is fundamental to the understanding of coil spring theory.
6. Coil Spring Stress and Deflection Equations and Strength Analysis: Read sections 12.3 and 12.4 of Juvinall. Note in figure 12.2 (b) how the basic stress equation is derived. The loading on a part diagram of a compressed coil spring indicates that the compressive force gives rise to torsion in the coils of the spring equal to FD/2. From this we conclude that the shear stress τ = Tr/J = 16T/πd 3 (see equations 4.3 and 4.4 of Juvinall). Substituting T = FD/2 we get:
τ = 8FD/ πd3
This equation is then modified as explained in the following pages to give equations 12.5 and 12.6.
Section 12.4 discusses the proportions of various materials that are used to make coil springs.
Try problems: 12.2, 12.10 and 12.14 before checking solutions given in the student solutions disc.
7. Spring Design Problem for Vehicle Suspension:
A spring is to be designed for the suspension system of a vehicle and it is to be positioned as shown in figure 1. When the spring has no load on it the droop is 125 mm as shown in figure 3. When the weight of the vehicle is applied and when the vehicle is stationery, the upper and lower arms are horizontal as shown in figures 1 and 2. The geometry and the required data for calculation are shown in figure 1, 2 and 3 and in table 1. Also the spring is to be ASTM A 232. Take the factor of safety of 1.5 Note the spring will deflect further when the vehicle travels over bumps.
Determine the followings parameters for the spring. 1. Initial length of the spring 2. Final length of the spring 3. The force acting on the spring. (Maximum and Minimum)
10 4. The diameter of the spring 5. Number of active coils
A Spring Vehicle frame Wheel E B Upper arm
Lower arm C D
Figure 1
Wheel width 200 mm Upper arm EB 250 mm Lower arm DC 375 mm Vertical Load acting on the 270 kg spring at point A (fig: 3) Spindle link ED 125 mm AB length 250 mm Droop 125 mm Total travel 500 mm Table 1
Solution: The initial position of the spring is as shown below in the figure 2.
Figure 2 Using the geometry and the given dimensions we can calculate the initial length of the spring.
Using triangle law,
11 h2 p 2 b2 h 3752 2502 h 450.69mm , (Refer figure 2.)
This is the initial length of the spring or the length when maximum force is applied to the spring.
When the wheel droops the spring is stretched and the spring length increases. The droop is only allowed 125 mm. The figure 3 below shows the configuration obtained from Solid Works.
A
E’ B
125 5 2 1 C
E
125
D B’ 217
Figure 3
Using the given dimension and triangle law we can calculate the maximum allowed length of the spring. To calculate the maximum length of the spring follow the dotted construction line and the dimensions as indicated. Again using the triangle law we calculate the length BE’ as follows
BE'2 BE 2 EE'2
BE' 2502 1252 217mm , Project this length to B’ and referring to the dimensions and the geometry we can calculate the final length of the spring AD as follows:
12 AD AB'2 DB'2
AD 5002 217 2 545mm
See Final Note:
The force acting on the spring can be calculated using the free body diagram. We are given the load of the vehicle frame acting vertically downward at point A to be 270 kg. Fy F
Spring Fx A Vehicle frame Wheel E B Upper arm mg
Lower arm C D
Figure 4
The Y- Component of the force is
Fy mg 2709.81 2.65kN
The angle θ made by the resultant force with the horizontal is given by:
(AB ED) 250 125 tan 1 56.30 EB 250
The force acting on the spring axis is therefore given by:
F 2.65 F y 3.2kN (Maximum force on the spring) sin sin56.3
Minimum force on the spring is when it is allowed to stretch, as shown in figure 3.
The angle θ’ in this case is given by
(AB') 500 ' tan 1 66.60 DB' 217
The force acting on the spring in this case is given by
13 F 2.65 F' y 2.9kN sin ' sin 66.6
Hence the force is varying from 2.9 kN to 3.2 kN. From the dynamic analysis the ratio of maximum force to minimum would be essentially the same as the ratio of maximum shear stress to the minimum shear stress.
3.2 This ratio is 1.1, Referring to the text (Juvinall), page 509, figure 12.16. The 2.9 load line is almost coincides with the static loading. This problem can be treated as a static case rather than dynamic. The maximum shear stress is 965 MPa. (The point where the load line intersects the line that defines the infinite life with shot peening.
Using the factor of safety of 1.5, we divide the maximum shear stress by 1.5 and calculate the maximum allowable shear stress to be 643 MPa.
Since we are not given the diameter d and outer diameter D of the spring. So we arbitrarily choose the ratio (C) to be 12. Our dynamic analysis shows the spring is to be loaded under static conditions. The torsional shear stress is given by
8FDK s d 3
Where, Ks is the correction factor for shear stress. This correction factor is given by
0.615 0.615 K 1 = 1 1.05 s C 12
F = 3.2 kN
Using the torsional shear stress we can calculate the diameter d of the spring, which is given by the equation
8FCK 8 3200 12 1.05 d s 6 12.64mm maz 64310
(Refer to the design table and select a more suitable diameter not less than 12.64 for application purpose. Note students are advised to select the standard wire diameter and redesign the problem based on the standard wire diameter.)
The outer diameter of the spring is given by:
D Cd 1212.64 151.7mm
The spring constant (k) is given by
14 F 3200 2900 k 3.16N / mm 545 450
Assume the shear modulus of elasticity as 79 GPa
The number of active coils is given by
dG 12.6479000 N 22.86 8C 3k 8123 3.16
Take the number of active coils as 23 coils.
The result of the calculation is summarised as follows
Initial length of the spring = 450.69 mm
Final length of the spring = 545 mm
Maximum force acting on the spring = 3.2 kN
Minimum force acting on the spring = 2.9 kN
Diameter of the spring =12.64 mm
Number of active coils = 23
Final Note: If you refer to figure 5, there is a little roll of the wheel axle when loaded. My calculation ignores the roll of this axle. Figure 3 obtained from solid works shows the exact extension of the spring. This difference is only 4 mm and it does not significantly affect the design of the spring.
A
Spring Vehicle frame
Wheel B E Upper arm 125 C
Lower arm D
Figure: 5
15