Quick guide to construction automation and robotics
This short guide is intended for those readers who are newcomers and who want to get a quick grasp of the subject. Once you have done so, you might like to try the self-study exercise to broaden your knowledge and appreciation.
- What is a construction robot and how would I recognise one?
First of all, we need to say what we mean by the word robot. The word itself was coined by the Czech playwright, Karel Capek in the early part of this century, having been taken from the Czech word 'robota' meaning forced work or slavery. In Capek's play, Rossum's Universal Robots, the robots were humanoid machines. The proliferation of industrial manipulators in factories in the latter part of this century has served to reinforce the image of the human-like machine to the extent that it has become the benchmark against which to judge whether or not a machine is a robot.
Strictly speaking, there are few industrial robots to be found in the construction sector, but that does not mean there are no other types. Ever since machines came under computer control we have had automation. Automated machines are, in fact, robots. They not only carry out a complex sequence of operations, but can also control their performance. They are self-regulating, correcting themselves as they go.
Turning to the specific case of construction robots, the question is, how do we recognise one? First, they need to comply with the above basic requirements. Second, they must be suited to their purpose: it would make no sense putting a high precision 'pick-and-place' robot on to a construction site and expect it to work wonders. The construction environment is very different to that encountered in the comparatively well ordered factory and both the demands for mobility and ruggedness impact on the design criteria for construction.robots.
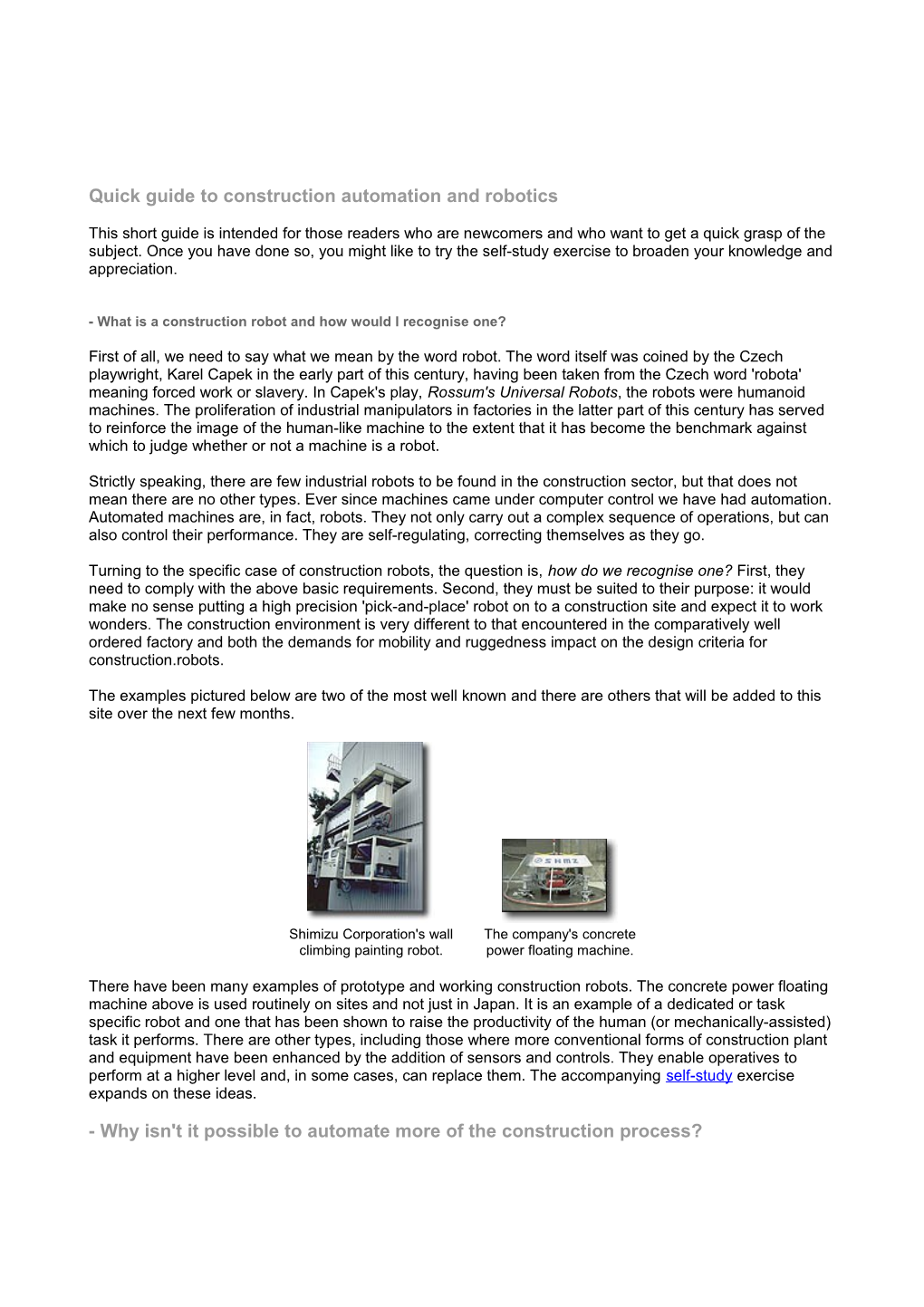
The examples pictured below are two of the most well known and there are others that will be added to this site over the next few months.
Shimizu Corporation's wall The company's concrete climbing painting robot. power floating machine.
There have been many examples of prototype and working construction robots. The concrete power floating machine above is used routinely on sites and not just in Japan. It is an example of a dedicated or task specific robot and one that has been shown to raise the productivity of the human (or mechanically-assisted) task it performs. There are other types, including those where more conventional forms of construction plant and equipment have been enhanced by the addition of sensors and controls. They enable operatives to perform at a higher level and, in some cases, can replace them. The accompanying self-study exercise expands on these ideas.
- Why isn't it possible to automate more of the construction process? Construction is a diverse industry and one that has to cope with an almost unique set of circumstances on each project and site. Whilst these can be used to excuse the industry's lack of progress, when compared with manufacturing, there are many problems that construction faces that exceed the current limits of technology and engineering know-how. The unstructured, dynamic nature of the construction site, the hazards and difficulties presented by temporary works, weather and, sometimes, the shear scale of activity mitigate against greater automation. There is also the investment needed. That said, significant progress has been made in, for instance, tunnelling, mining and other civil or heavy engineering applications. In the case of buildings, the development of a systematised approach to construction using largely dry, prefabricated components delivered just-in-time has advanced the degree of automation now possible. Although it is still early days, development of this kind is indicative of a longer term trend.
Shimizu SMART building project in Nagoya, Japan. See case study under the Technologies section or self- study exercise.
Case Study: SMART (Shimizu Manufacturing system by Advanced Robotics Technology)
SMART represents more recent attempts at computer integrated construction (CIC) - discussed below - that claims to reduce by 30% the number of man-hours required to complete a multi-storey office building (Normile, 1993). System set-up takes about six weeks, after which the building's top floor and roof are erected on top of four jacking towers: the effect is to resemble a top-hat. The jacking towers are used to push up the 1,323 ton top floor assembly - the main work platform - as well as lifting their own bases from floor to floor in a cycle time of around two and a half hours. The heart of the system is composed of lifting mechanisms and automatic conveying equipment which is installed on the work platform. This later becomes the roof of the building. Overhead gantry cranes are connected to the underside of the roof structure in a way that resembles a factory production facility. Trolley hoists are used to lift and position components which are introduced at ground level.
The whole process is computer-controlled, though workers are still involved in overseeing operations at least for the time being. Simplified connections between components facilitate rapid erection times: self-centering column connections require only fine-tuning with a torque wrench and a laser-guided gauge. A clamp-on welding robot - one of a few task-specific devices - is used afterwards to effect the final mating of the column ends. Floors emerge from under the top-hat pre-clad - again from the inside - allowing work in fitting out to begin immediately. Weather is excluded from the job-site by a mesh fabric hung around the work area. Racks of pre-assembled pipework are a further example of an entire approach to rationalising design and production, the aim of which is to drive down the man-hours required for production.
SMART automates a range of production processes including:
erection and welding of steel frames placement of precast concrete floor planks exterior and interior wall panels installation of various prefabricated units.
Inevitably, with the first run of anything, costs are higher than normal: it would be unusual if it were not so. However, further improvements to the system will enable it to have wider application and, hence, lower costs because of economies of scale and familiarity with the technology. Likewise, lower cost will make the system more attractive.
- Computer integrated construction
SMART serves many purposes. Apart from the obvious gains as outlined above, it forms part of a much broader strategy for construction. CIC or computer integrated construction is the concept within which SMART is placed (Miyatake, 1993). In this sense, SMART is being used to demonstrate an approach which aims to integrate the entire AEC (architecture/engineering/construction) process. It achieves this by bringing together three elements:
integrated design and construction planning a site automation system factory automation.
Innovations in IT, typically KBE, database management, simulation, engineering and management software, 3-D CAD and object-oriented programming have opened up new possibilities for systems' integrators. SMART is, thus, a prime example where this has been achieved.
CIM or computer integrated manufacturing has been used as the model for the site automation system element of SMART. Technologies such as just-in-time (JIT), materials' handling, process control and inventory control are implicit in the approach. The third element, site automation, brings together a raft of technologies and management practices that are adapted to the circumstances of the construction site. Automated transportation of materials, followed by their assembly and positioning using robots completes the process.
Performance targets for CIC projects are demanding. Shimizu has set the following, seeing them as entirely realistic:
reduction in the total time of the project 50% reduction in the total manpower requirement 50%.
The implications of the push towards total automation, as embodied by CIC, is to require many changes to working practices. For Shimizu, this means that job descriptions for its workers have had to become less specific because of the integration of different functions. The emphasis has moved the company still closer to multi-disciplinary working. Within this, Shimizu has recognised that, not only are technical skills important, so are the personalities of the workers.
- On the R&D agenda
R&D continues to explore many areas. The following is a list of current work topics:
construction robot control construction robot design techniques information systems and technologies robot safety and safeguarding sensors and sensing techniques user interfaces automated planning and scheduling bridges and road work building construction building finishing meteorology in construction special applications. - Future form of construction automation
If SMART represents the extent of current achievement, what will be the next step in the quest for fully automated construction? For the answer to this question we should look at the IF7 project in Japan. Aptly named the Intelligent Field Factory , the aim is to bring advanced (i.e. intelligent) manufacturing to construction. The promoters of the project, Hitachi Zosen, Kajima, Shimizu, Hazama, Waseda University and MITI, are likely to be joined by researchers and industrialists from Europe and Canada under the support of the IMS (Intelligent Manufacturing Systems) initiative. Conceptually, the project is simple enough: it will build upon the success of SMART and systems like it to deliver the intelligent site of the future.
The concept operates on two levels. First, there is the real construction world in which people and robots co-work and interact with one another. The second is cyberspace within which is held a vast amount of information to be used to help deliver buildings or other large volume structures anywhere in the world. In this respect, it is important to note that buildings constitute just one type of structure to be encompassed by the IF7 project; another type is ships.
In the real construction world, large volume structures would be built largely with pre-assembled components. Intelligent robots would work to assemble predominantly heavy components which would be complete with knowledge of how they are to be processed and so on. Each robot would be able to communicate easily with people. Cyberagents which exist in cyberspace will be used to support decision-making in the real construction world. - When is it likely that construction robots will become an everyday sight?
The short answer is: don't hold your breath. The diversity of construction activity and the uniqueness of the problems to be solved mean that it will be some time before we see robots as routinely as one might hope. In some cases, for instance, high-rise construction, it is possible that automation systems will be progressively developed and refined to the point where the sites themselves come very close to an assembly operation. In heavy and civil engineering, more autonomous machines will appear replacing humans where safety and productivity are key issues.
25 years ago, it would be very uncommon to see much construction plant and equipment on small scale, domestic work. Yet today, access equipment, mechanical excavators and power hand tools are the norm. This incremental development of productivity-raising and cost-saving devices will continue alongside the more ambitious site automation and autonomous systems. 25 years from now, it will be a very different picture to now on many sites around the world where concern for human life is paramount. Safety and the environment will become a driving force for more automation and robots on our sites. - Who is developing robots and automation systems for construction?
To be fair, most of the running - so to speak - has been done in Japan by the major construction companies, often supported by large research institutes (of their own) and by collaboration with heavy engineering enterprises. There have been developments in the USA, Canada, Europe and Australia, but by number alone the Japanese have produced far more than the rest put together. Of course, much development has and is continuing to be undertaken by major plant and equipment manufacturers - work which can be done on the back of sales and close relationships with the customer. In some respects, it is tempting to say that we are seeing a convergence of technology just as we see in telecommunications and elsewhere.
You will forgive us for not naming individual companies here, but to name a few would be to leave out many more. - How do I become more involved in this subject?
This first answer has to be to join IAARC, if you are not already a member. This can be on an individual basis or corporately. We would be bound to say that, wouldn't we? The truth is there is no other organisation of this kind. Throughout the world, there are local interest groups (or chapters) affiliated to IAARC. You can enquire about one in your own country by using our feedback form. For those of you who want a more active role, there is the chance to seek election to the Board of Directors of IAARC or, at the very least, to participate in one of its many committees. The International Association for Automation and Robotics in Construction http://www.iaarc.org/frame/intro.htm Construction robot systems in Japan http://www.iaarc.org/frame/publish/ccrr_toc.htm 1. Earthworks Tele-Earthwork System Fujita Corporation 2 Navigation-type Surveying System Using Real-time Kinematic GPS Mitsui Construction Co., Ltd. 4 GPS-based Remote Control System for Construction Equipment Taisei Corporation 6 Image-controlled Non-prism Laser Measurement System Taisei Corporation 8
2. Foundation Work Multi-jointed Pile Driving Machine RX2000-2 Hitachi Construction Machinery 10 Co., Ltd. Integrated Control System for Diaphragm Wall Excavation Kajima Corporation 12 Slurry Control System for Diaphragm-wall Excavation Konoike Construction Co., Ltd. 14 Automatic Excavation System for Diaphragm-wall Excavator Konoike Construction Co., Ltd. 16 Excavation System for Diaphragm Wall Obayashi Corporation 18 Automatic Concrete Placing Control System for Diaphragm Wall Obayashi Corporation 20 SH-SHINSO Method (Unmanned Deep Shaft Construction System) Shiraishi Co. 22 Hydraulic Jack Control System for Underpinning Taisei Corporation 24 High-Accuracy Position Control System for Underground Diaphragm Thisei Corporation 26 Walls Digging Work System for Hard Rock Tokyu Construction Co., Ltd. 28 Digging Work Robot Tokyu Construction Co., Ltd. 30 Removable Grout Plant Toto Electric Industry Co., Ltd. 32
3. Crane Work Safety & Compact New Type Crane "LC08M-1" Komatsu Ltd. 34 New Mini Crane from Japan Can Ride on the Van, Can Go up and Komatsu Ltd. 36 down the Stairs "KALCA1TA" (LM15-1) Concrete Placing Crane Obayashi Corporation 38 Automated Crane for Reinforcement Takenaka Corporation 40
4. Dam Construction FUJITA Automatic Concrete Transfer System (FACTS) Fujita Corporation 42 Self-rising Dam Form Hazama Corporation 44 Robot for Green-Cutting and Disposing Latance Hazama Corporation 46 Automated-Aggregate-Plant Hazama Corporation 48 Dam Concrete Transport Facilities INCLINE Ishikawajima-Harima Heavy 50 Industries Co., Ltd. Automatic Form for Dam Construction Kajima Corporation 52 Automatic Control System of the Hydraulic Crawler Crane - The Konoike Construction Co., Ltd. 54 application to the concrete dam construction - Konoike Transfer Car Automatic Control System Konoike Construction Co., Ltd. 56 Automatic Concrete-Transport System Maeda Corporation 58 Automatic Concrete Transportation System in Dam Construction Nishimatsu Construction Co., 60 Works Ltd. Dam Concrete Automatic Transfer System Obayashi Corporation 62 Automatic Concrete Casting System for Dam Construction Sato Kogyo Co., Ltd. 64 Self Climbing Formwork for inclined Round Surface Sato Kogyo Co., Ltd. 66 Brush-type Concrete Green Cutting Robot Shimizu Corporation 68 Grout Data Control System Toto Electric industry Co., Ltd. 70
5. Concrete Work Self-rising Dam Form Hazama Corporation 44 Robot for Green-Cutting and Disposing Latance Hazama Corporation 46 Automatic Form for Dam Construction Kajima Corporation 52 Automatic Control System of the Hydraulic Crawler Crane - The Konoike Construction Co., Ltd. 54 application to the concrete dam construction - Konoike New Tunnel Lining System (K-Nil) Konoike Construction Co., Ltd. 72 Water-Jet Concrete Chipping Robot Kumagai Gumi Co., Ltd. 74 Automatic Concrete-Transport System Maeda Corporation 58 Automatic Concrete Transportation System in Dam Construction Nishimatsu Construction Co., 60 Works Ltd. Dam Concrete Automatic Transfer System Obayashi Corporation 62 Automatic Concrete Vibrator Obayashi Corporation 76 Automatic Concrete Casting System for Dam Construction Sato Kogyo Co., Ltd. 64 Horizontal Concrete Distributor Takenaka Corporation 78 Simplified Distributor "DB ROBO" Takenaka Corporation 80 Automated Precast Concrete Manufacturing System Takenaka Corporation 82 Tunnel Swift Lining Robot Tekken Corporation 84 Lining Cutting Robot Tekken Corporation 86 Shotcrete Control System Toa Corporation 88 Control Equipment for Secondary Lining Concrete Placement Toa Corporation 90 6. Mountain Tunnel PASS (Pre-Arch Shell Support) METHOD Fujita Corporation 92 Front Monitoring System for Mountain Tunnel Hazama Corporation 94 New Pre-Lining Support Method Hazama Corporation 96 Konoike New Tunnel Lining System (K-NTL) Konoike Construction Co., Ltd. 72 Secondary Lining by Using an Automatic Vibrator System Maeda Corporation 98 Hard Rock Heading Machine Roadheader S-300 Obayashi Corporation 100 Automatic Operation System for Tunnel Boring Machine Obayashi Corporation 102 A New System for Marking off on the Face in a Tunnel Obayashi Corporation 104 Rotary Shotcrete System Obayashi Corporation 106 TBM Full-Automatic Operation System Obayashi Corporation 108 Automatic Transport System Intended for Long Tunnels, GEO- Sato Kogyo Co., Ltd. 110 SHUYFLE Three-dimensional Tunnel Marking System Taisei Corporation 112 Lining Cutting Robot Tekken Corporation 86 Tunnel Swift Lining Robot Tekken Corporation 84 Automatic Slump Adjusting System Toa Corporation 114 Control Equipment for Secondary Lining Concrete Placement Toa Corporation 90 Shotcrete Control System Toa Corporation 88 Laser Ventilation System Toa Corporation 116 Roadheader with Automatic Excavation System Toda Corporation 118
7. Shield Tunnel Highly Integrated Shield Driving Automatic Control System (Hi- Hazama Corporation 120 SDACS) Automatic Segment Assembly Robot (Automatic Assembling of Core Hitachi Construction Machinery 122 Type Concrete Segment) Co., Ltd. Automatic Shield Direction Control System (Fuzzy Controlling of Hitachi Construction Machinery 124 Deviation and Direction Deviation Amount) Co., Ltd. Kajima Type Automatic Segment Erection System Kajima Corporation 126 Automatic Segment Erection System (Short Bolt Type) Kawasaki Heavy Industries, Ltd. 128 Multi-Jointed Arm Erector Kawasaki Heavy Industries, Ltd. 130 Fault Diagnosis System for a Shield Tunnelling Machine Kawasaki Heavy Industries, Ltd. 132 Cotter Type Joint Segment Automatic Erection System Kawasaki Heavy Industries, Ltd. 134 MS (Multi Stage) Shield System Komatsu Ltd. 136 K-EASIS - Konoike Easy-operating Automatic Shield Integrated Konoike Construction Co., Ltd. 138 System - Construction Method of Transporting and Installing Precast Railway Mitsui Construction Co., Ltd. 140 Slabs Using Compressed Air Position Control System of a Shield Tunneling Machine Nishimatsu Construction Co., 142 Ltd. Segment Automatic Building Intelligent System "SABIS" NKK Corporation 144 Self-Supported Segment Assembly Robot for the Shield Tunneling Obayashi Corporation 146 Method, 0-SERO Rebar Fabricating Robot for the Secondary Cast-in-place Lining at the Obayashi Corporation 148 Shield Tunnel Segment Bold Tightening Robot, OMNIHAND 500 Obayashi Corporation 150 Segment Automatic Carrier System for Shield Works Shimizu Corporation 152 An Invert Concrete Screeding Machine for Shield Tunneling Thkenaka Civil Engineering & 154 Construction Co., Ltd. An Automatic Direction Control System for Shield Tunneling Thkenaka Civil Engineering & 156 Construction Co., Ltd. Double-grip Type Automatic Erector Toda Corporation 158
8. Marine Ship/Underwater Work Seabed Rock Excavating and Trenching Machine: YD500 Komatsu Ltd. 160 Marine Work's Execution Support System Nishimatsu Construction Co., 162 Ltd. GPS-based Precision Vessel Positioning and Guidance System Taisei Corporation 164
9. Placing of Reinforcement/Steel-framework Automated Weather-Unaffected Buildings Construction System Fujita Corporation 166 "AKATSUKI 21" Force up Building Floors High into the Air "ARROW-UP SYSTEM" Fujita Corporation 168 FCF Construction Method Fujita Corporation 170 Welding Robot System for Building Main Columns "WELMA" Fujita Corporation 172 Automated Building Construction System (AMURAD Construction Kajima Corporation 174 System) NC Welding Machine for Steel Girders Kawasaki Heavy Industries, Ltd. 176 Building Construction Push-Up Jack System Kawasaki Heavy Industries, Ltd. 178 Automatic Concrete Distribution System with Tower Crane - Konoike Construction Co., Ltd. 180 Application to Super High-rise R.C. Building MCCS (Mast Climbing Construction System) Maeda Corporation 182 Automatic Rebar Bender and Rebar Column Fabrication Unit Obayashi Corporation 184 ABCS (Automated Building Construction System) Obayashi Corporation 186 Automated Construction System for Reinforce Concrete Building Obayashi Corporation 188 Computer Integrated and Automated Construction System Shimizu Corporation 190 ---SMART System-- Remote Shackle Releasing System Shimizu Corporation 192 ---Mighty Shackle Ace-- Load Balancer "GEO" Shimizu Corporation 194 Column Welding Robot Shimizu Corporation 196 Steel Members Positioning System for Ground Level Assembling Taisei Corporation 198 'T-UP' Building Construction Method Taisei Corporation 200 Laser-controlled Automatic Measurement System for Steel Erection Taisei Corporation 202 Mast Column Building Method & Mast Column Crane Taisei Corporation 204 Roof Push up Construction Method Takenaka Corporation 206 Steel Frame Welding Robot Takenaka Corporation 208 Assembly Line for Reinforcement Bar Units Takenaka Corporation 210 Automatically Adjusting System of Plumbing Structural Steel Column Toda Corporation 212 TO - Plumb Navi Steel Plate Handling Machine EASY LIFTER Toda Corporation 214 Mechanized System for Anti-quake Reinforcement, Drilling Machine Toda Corporation 216
10. Finishing Work of Building Fireproof Insulation Spray Robot Fujita Corporation 218 Erect Exterior Walls on High Rise Building without Cranes "SHUTTLE Fujita Corporation 220 SYSTEM" Automatic Work Execution System for PC Panels on Exterior Walls Fujita Corporation 222 Floor Troweling Robot Hazama Corporation 224 Tile-Setting Robot for Exterior Walls Hazama Corporation 226 Exterior-wall Painting Robot Kajima Corporation 228 Concrete-Slab Finishing Robot Kajima Corporation 230 Material-Handling System for Interior Finishes Mitsubishi Heavy Industries, Ltd. 232 Automatic Laser Beam Guided Floor Work Robot Obayashi Corporation 234 Automatic Winding Machine for Carbon Fiber Strand Obayashi Corporation 236 Suspender Device Controlling Load Rotation by Gyroscopic Moments Obayasbi Corporation 238 Robot for Sprayed-on Fire Protection ---SSR-3--- Shimizu Corporation 240 Ceiling Panel Positioning Robot --- CFR-1 --- Shimizu Corporation 242 EZ-ten Shimizu Corporation 244 Concrete Floor Finishing Machine FLAT-KN Shimizu Corporation 246 Robot for Painting Exterior Walls Taisei Corporation 248 Concrete Floor Screeding Robot "SCREED ROBO" Takenaka Corporation 250 Concrete Floor Surface Finishing Robot "SURF ROBO" Takenaka Corporation 252 Automated Coating Delamination Robot "JET-SCRAPER" Takenaka Corporation 254 Automatic Cladding System, TO-AUTO FX Toda Corporation 256 Fire-resisting Rock Wool Spraying Robot TN-Fukkun Toda Corporation 258 Light Weight Manipulator Tokyu Construction Co., Ltd. 260
11. Prefabrication of Reinforcement Automated Reinforcement Pre-assembly Line Shimizu Corporation 262 Reinforcing Bar Fabrication Robot Taisei Corporation 264
12. Pavement Work C & M Remixer Niigata Engineering Co., Ltd. 266 "Sentore 21" Asphalt Finisher Niigata Engineering Co., Ltd. 268 Robot Asphalt Finisher Niigata Engineering Co., Ltd. 270 SAKAI ER501F Road Profile Cutter equipped with ACCS (Automatic Sakai Heavy Industries, Ltd. 272 Cutter Control System) Bending Asphalt Paver The Nippon Road Co., Ltd. 274 13. Pneumatic Caisson Work ROVO Caisson Method for Automating Excavation, Soil Transfer and Ohmotogumi Co., Ltd. 276 Soil Discharging Operations in Pneumatic Caisson Ground System for Remote Operation of Overhead Traveling Ohmotogumi Co., Ltd. 278 Excavator in Pneumatic Caisson Unmanned Caisson Method (Ground-Level Remote Control System Shiraishi Co. 280 for Pneumatic Caisson)
14. Survey Contour Boy Kajima Corporation 282 Navigation-type Surveying System Using Real-time Kinematic GPS Mitsui Construction Co., Ltd. 4 Image-controlled Non-prism Laser Measurement System Taisei Corporation 8 Surveying Robot Tokyu Construction Co., Ltd. 284
15. Inspection & Monitoring Front Monitoring System for Mountain Tunnel Hazama Corporation 94 Clean Room Inspection Robot "CRIMRO" Komatsu Ltd. 286 Clean Room Environment Measuring Robot (K-CREITOR) Kumagai Gumi Co., Ltd. 288 Automatic Inspection System for Piping Corrosion Mitsui Construction Co., Ltd. 290 Clean Room Inspection and Monitoring Robot, CRIMRO Obayashi Corporation 292 Wall Tile Inspection System Obayashi Corporation 294 Inspection System for Tiles Cast in Concrete Panel Taisei Corporation 296 Exterior Wall Tile Inspection Robot Taisei Corporation 298 Clean Room Measuring Robot Takenaka Corporation 300 Tiled Wall Inspection System Takenaka Corporation 302 Inspection Robot for Nuclear Power Plant Toshiba Corporation 304 Ultra Compact Underwater Inspection Robot Toshiba Corporation 306
16. Maintenance/Others Exterior-wall Painting Robot Kajima Corporation 228 Automatic Cleaning System for the under Carriage of Construction Komatsu Ltd. 308 Machine "YC300W-1" Konoike Transfer Car Automatic Control System Konoike Construction Co., Ltd. 56 Automated Cleaning System for Aluminum Scaffolding Board Obayashi Corporation 310 Floor-Climbing Type Elevator Sanoyas Hishino Meisyo 312 Corporation Automated Precast Concrete Manufacturing System Takenaka Corporation 82 TAPS ( Tobishima Auto Level IantographSlipform) Method Tobishima Corporation 314 Construction Manipulator Tokyu Construction Co., Ltd. 316 Wall Surface Operation Robot Tokyu Construction Co., Ltd. 318 Vacuum-adhering and Self-travelling System, Water-jetting Robot Urakami Research & 320 Development Co. Vacuum-adhering and Self-travelling System, Polishing and Painting Urakami Research & 322 Robot Development Co. Vacuum-adhering and Self-travelling System, Abrasives-blasting Urakami Research & 324 Robot Development Co.
17. Element Techniques Mobile Crusher 'GARAPAGOS' BR350JG Komatsu Ltd. 326 Autonomous Truck System Komatsu Ltd. 328 Construction Method of Transporting and Installing Precast Railway Mitsui Construction Co., Ltd. 140 Slabs Using Compressed Air Steel Plate Handling Machine EASY LIFTER Toda Corporation 214 Mechanized System for Anti-quake Reinforcement, Drilling Machine Toda Corporation 216 Double-grip Type Automatic Erector Toda Corporation 158 Removable Grout Plant Toto Electric Industry Co., Ltd. 32