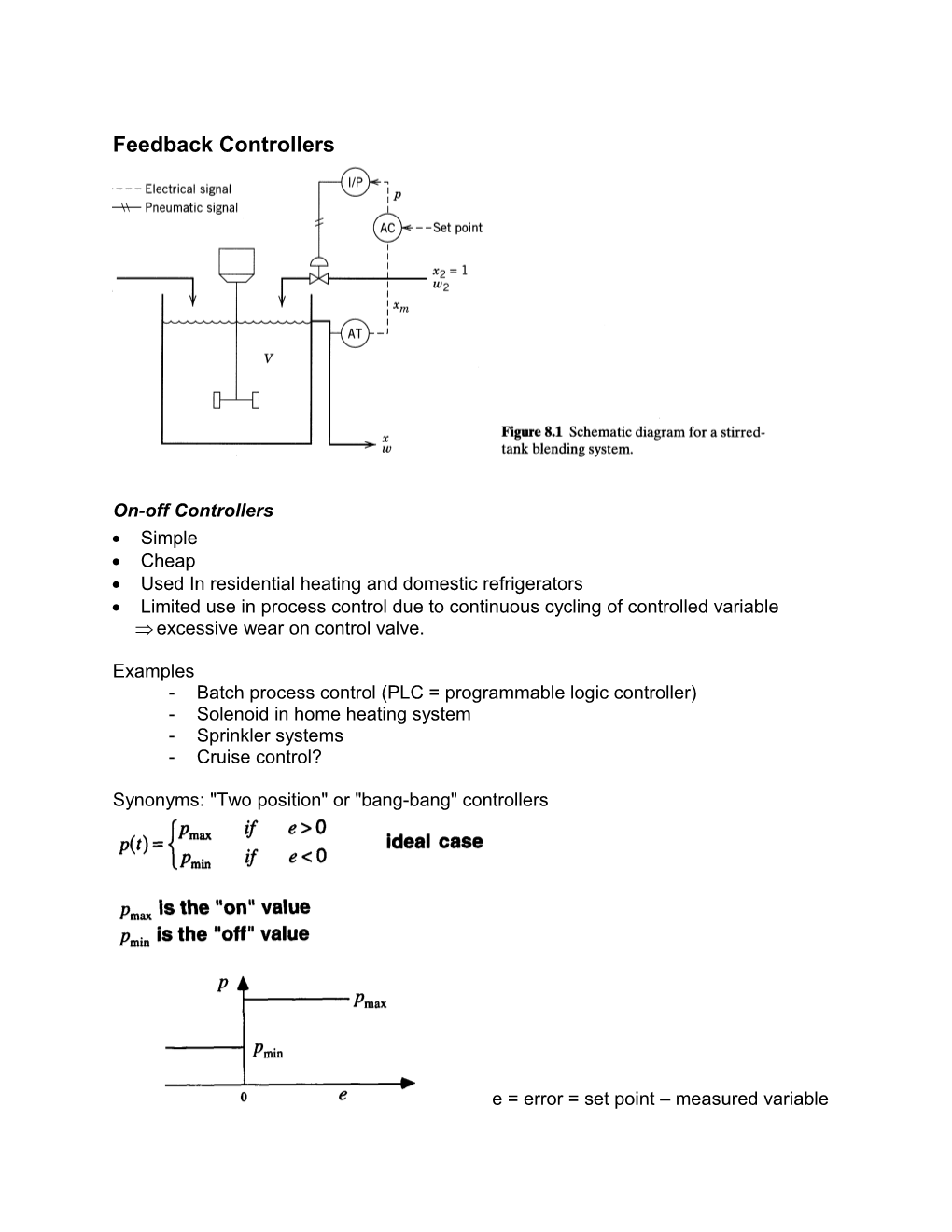
Feedback Controllers
On-off Controllers Simple Cheap Used In residential heating and domestic refrigerators Limited use in process control due to continuous cycling of controlled variable excessive wear on control valve.
Examples - Batch process control (PLC = programmable logic controller) - Solenoid in home heating system - Sprinkler systems - Cruise control?
Synonyms: "Two position" or "bang-bang" controllers
e = error = set point – measured variable Controllers output has two possible values
Practical case (dead band)
δ = tolerance
system never reaches steady-state
Three Mode (PID) Controller Proportional Integral Derivative
Proportional Control
Define an error signal, e, by e= Ysp - B where Ysp = set point B = measured value of the controlled variable (or equivalent signal from transmitter) Since signals are time varying, e(t) = Ysp(t) - B(t) n.b. Watch units!! For proportional control
p(t) = p + K ce(t) p = p - p where p(t) controller output p bias value (adjustable)
K c controller gain (dimensionless, adjustable) Standards (ISO/ISA)
3 – 15 psi 4 - 20 ma 0 – 10 VDC
Proportional Band, PB 100% PB K c Reverse or Direct Acting Controller
K c can be made positive or negative Recall for proportional FB control:
p(t) = p + K ce(t) or p(t)=p+K轾 Y (t)-B(t) c臌 sp
Direct-Acting (K c < 0) “output increases as input increases" p(t) B(t)
Reverse-Acting (K c > 0) “output increases as input decreases"
Example: Flow Control Loop
Assume FT is direct-acting. Select sign of Kc so that KcKv > 0.
1) Air-to-open (fail close) valve ? 2) Air-to-close (fall open) valve ? Consequences of wrong controller action?? Transfer Function for Proportional Control: Let p(t) p(t) - p Then controller input/output relation can written as
p(t) K ce(t) Take Laplace transform of each side,
P(s) K cE(s) or P(s) Kc E(s)
Integral Control Synonyms: "reset", "floating control"
1 t P(s) 1 p(t) p e(t)dt I 0 E(s) Is
I reset time (or integral time) - adjustable
Proportional-integral (PI) Control 1 t p(t) p K c e(t) e(t)dt integral provides memory of e I 0 most popular controller
Response to unit step change in e:
Integral action eliminates steady-state error (i.e., offset) Why?? e 0 p is changing with time Transfer function for PI control P(s) 1 K c 1 E(s) Is 1 Some controllers are calibrated in ("repeats per minute") Instead of I I For PI controllers, p is not adjustable.
Derivative Control Action Ideal derivative action de p(t) p D dt Used to improve dynamic response of the controlled variable db Derivative kick (use ) dt Use alone?
PID CONTROLLER
Ideal controller 1 t de p(t) p K c e(t) e(t)dt D I 0 dt Transfer function (ideal) P(s) 1 K c 1 D s E(s) Is Transfer function (actual) lead /lag units
P(s) Is 1 Ds 1 K c E(s) Is Ds 1 = small number (0.05 to 0.20) Automatic and Manual Control Modes
Automatic Mode Controller output, p(t), depends on e(t), controller constants, and type of controller used. ( PI vs. PID etc.) Manual Mode Controller output, p(t), is adjusted manually. Manual Mode is very useful when unusual conditions exist: plant start-up plant shut-down emergencies Percentage of controllers "on manual” ??
Digital PID Controller 轾 犏 Dt n-1 t D Finite difference approximation pn= p + K c犏 e n + e k +( e n - e n-1 ) t Dt 犏 142I k =1 43 1 442 4 43 臌 I D where t = the sampling period (the time between successive samples of the controlled variable)
pn = controller output at the nth sampling instant, n=1,2,…
en = error at the nth sampling unit velocity form - see Equation (8-19)
(pn ) - incremental change
Typical Responses of Feedback Control Systems Consider response of a controlled system after a sustained disturbance occurs (e.g. step change in disturbance variable); y > 0 is off-spec. Price Comparison (1979 Prices)
Controller Pneumatic Electronic P $ 840 $1470 PI $ 900 $1350 PID $1000 $1470
Digital PID (1994) < $1000. integral action ~ Kc/t I Summary of the Characteristics of the Most Commonly Used Controller Modes 1. Two Position: Inexpensive. Extremely simple. 2. Proportional: Simple. Inherently stable when properly tuned. Easy to tune. Experiences offset at steady state. (OK for level control) 3. Proportional plus reset: No offset. Better dynamic response than reset alone. Possibilities exist for instability due to lag introduced. 4. Proportional plus rate: Stable. Less offset than proportional alone (use of higher gain possible). Reduces lags, i.e., more rapid response. 5. Proportional plus integral plus derivative: Most complex Rapid response No offset. Best control if properly tuned.
Example: Liquid Level Control Control valves are air-to-open Level transmitters are direct acting
Questions: 1. Type of controller action? Select Kc so that Kc K v K p > 0
(a) air-to-open valve: sign of Kv? (b) sign of process gain?