Optical Coding and Modulations - White Book -
1. OPTICS VS. RF...... 1 2. SCENARIOS...... 1
2.1. IDENTIFICATION OF SCENARIOS...... 2 2.2. NEED FOR STANDARDIZATIONS...... 2 2.3. SCENARIO REQUIREMENTS...... 2 2.3.1. Main requirements...... 2 2.3.2. Specific requirements...... 3 3. DEEP-SPACE COMMUNICATIONS...... 3
3.1. OPTICAL NAVIGATION...... 5 4. STUDY OF THE OPTICAL TECHNOLOGY...... 5
4.1. METRICS FOR MODULATION AND CODING SOLUTIONS...... 5 4.2. MODULATION...... 6 4.3. CHANNEL CODING...... 6 4.4. …...... 6 5. REFERENCES...... 6 6. ACRONYMS...... 7
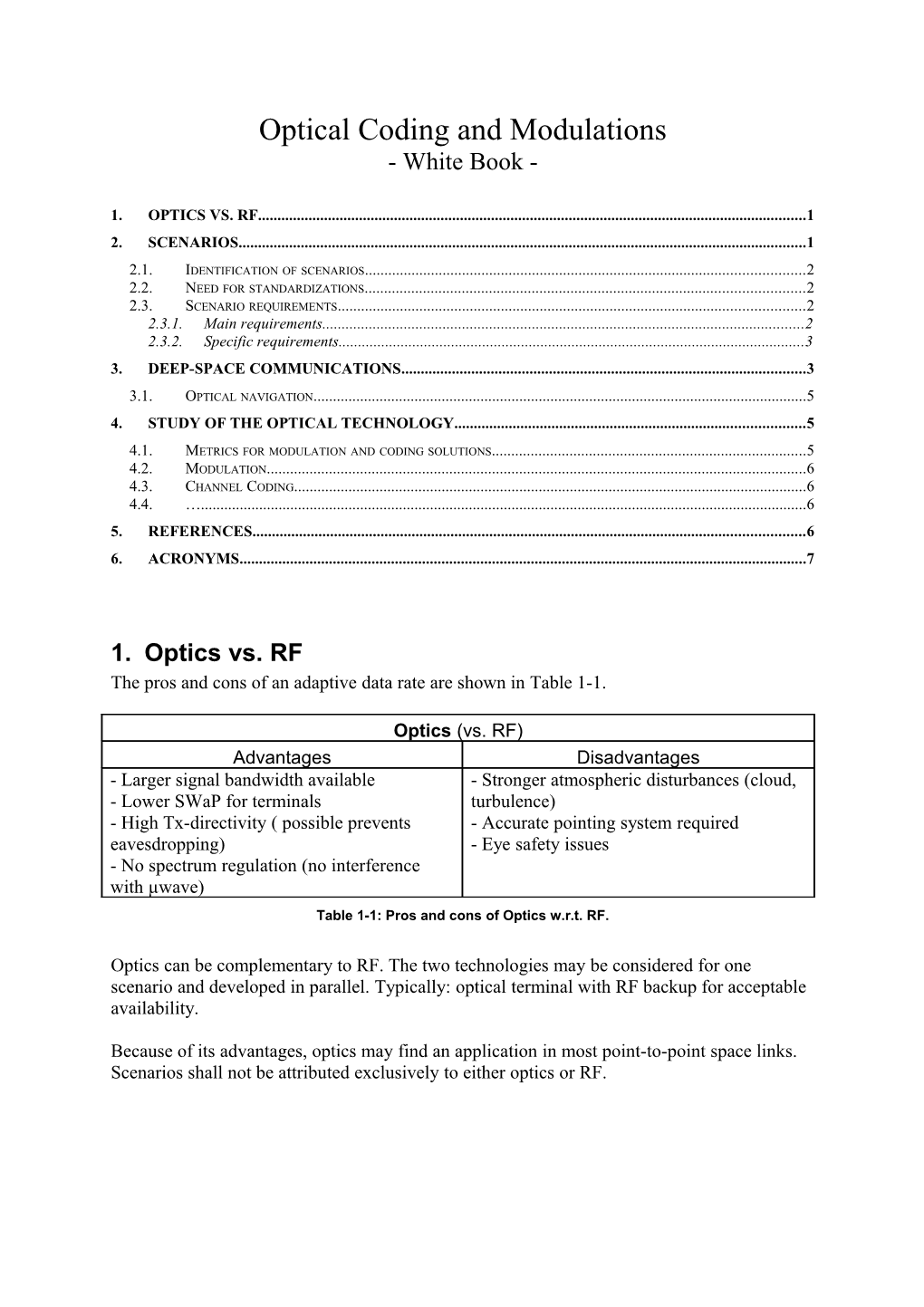
1. Optics vs. RF The pros and cons of an adaptive data rate are shown in Table 1-1.
Optics (vs. RF) Advantages Disadvantages - Larger signal bandwidth available - Stronger atmospheric disturbances (cloud, - Lower SWaP for terminals turbulence) - High Tx-directivity ( possible prevents - Accurate pointing system required eavesdropping) - Eye safety issues - No spectrum regulation (no interference with µwave) Table 1-1: Pros and cons of Optics w.r.t. RF.
Optics can be complementary to RF. The two technologies may be considered for one scenario and developed in parallel. Typically: optical terminal with RF backup for acceptable availability.
Because of its advantages, optics may find an application in most point-to-point space links. Scenarios shall not be attributed exclusively to either optics or RF. 2. Scenarios
2.1. Categories Scenarios can be categorized according to their geometry:
A) Proximity links 1. without significant atmosphere in a) Earth proximity (e.g., inter-satellite) b) Celestial-body proximity (e.g., lander-orbiter) 2. with Earth atmosphere a) LEO-GND up-/downlinks b) GEO-GND up-/downlinks
B) Exploration links (Moon and beyond) 1. without significant atmosphere (e.g., Link with Earth orbiter- relay). 2. with Earth atmosphere. a) Moon up-/downlinks b) Lagrange points c) deep-space probes
2.2. Scenario requirements
2.2.1. Main requirements 1) High data rates 2) High availability 3) Low SWaP for terminals 4) Absence of interference with other µwave systems
2.2.2. Specific requirements Examples: A1a): EDRS requirements : 600 Mbit/s A1b): In situ link, Mars lander to Mars orbiter: 1 Mbit/s (to be checked)
B2a): Moon downlink: 622 Mbit/s B2a): Moon uplink: 20 Mbit/s B2c): Mars downlink: 1 to 30 Mbit/s
Most scenarios require that the link outage probability (LOP) due to clouds is < 5e-2 (availability > 95%). From Figure 1-1, we see that, with a single ground station, no location on the Earth surface could allow such a link availability. Figure 1-1: Average cloud probability in % based on synoptic data (1971-1996) from C. Hahn und S. Warren [Uni06].
2.3. Need for standardizations Cross-support Cross-support is generally important for exploration missions (e.g., Moon, Mars) and for the subsequent shared use and integration of communication resources. Cross-support is also needed for links through the Earth atmosphere (categories A.2 and B.2) in order to establish an international ground-station (GS) network that allows acceptable link availabilities.
Terminal interoperability Terminal interoperability is especially important for networking. Future disruption-tolerant networks (DTN) will require standardized communication nodes.
3. Deep-space communications
Some information about ESA’s plans on planetary exploration could be extracted from an ESA ITT [Int09]. Exploration is on the Agenda of all major space agencies of the world. NASA and ESA have clearly identified the exploration of Mars as one of their main objectives in addition to their contribution to the international effort on the exploration of the solar system. In this frame, various robotic missions are being investigated in preparation for human exploration. Currently, both microwave and optical technologies are considered for communication systems. Special care is given to the networking aspects, e.g. deep space IP networks, delay tolerant networking and relevant suitable protocols.
Interplanetary space exploration programmes stretch between near and long timescale. The timescale is defined as follows: • Near term: 2010-2020; • Medium term: 2020-2030; • Long term: 2030-2040.
The Lunar and Martian trunk are based on Lunar and Martian relay elements to support robotic and human exploration at the Moon and Mars. A high data rate trunk is foreseen from these bodies to the Earth for information exchange and to connect to the Lunar and Martian local area networks on the surface and orbits of these bodies.
The European exploration activities are just being defined. However, concerning near term objectives, like ExoMars, two mission scenarios are available for consideration to form the communications infrastructure: • One separate European communications satellite, or • The Mars Orbiter acting as a communications node.
The ExoMars mission is scheduled for the 2011-2013 timeframe, and a Mars Sample Return (MSR) mission is foreseen to take place not earlier than 2020. While the MSR mission architecture definition is on-going, various MSR “precursor” missions are also under investigation, targeting Mars, but also the Moon and possibly other locations.
The possible services required for Mars missions are shown in Figure 2-2 together with the related data rate. On the long-term, technologies and architectures must evolve so as to provide the necessary services.
Figure 2-2: Applications and data rate for future space missions [NASA07] 4. Optical tracking A tracking model must be assumed for the channel characterization of the exploration downlinks.
5. Optical navigation Instead of RF signals, also optical communication signal can be used for navigation. Two simple techniques may be implemented [Hem06]: - Two-way ranging A laser pulse is sent on the uplink (i.e., on the beacon or on the command uplink). The pulse is detected on the spacecraft and used to trigger a pulse from the downlink laser. - Angular measurements [Nul92a] [Nul92b] If, in addition to the optical signal, the light from a star is collected by the ground telescope, two spots can be observed simultaneously on the focal-plane detector. The vector difference between the two spot locations represents the angular offset of the spacecraft relative to the star. Thus, for optical spacecraft-signal tracking, angular measurements equivalent to the RF interferometric systems can be made but with a single ground telescope. Furthermore, whereas the current RF DDOR technique requires independent measurements of the horizontal and vertical components of angles, an optical tracking telescope can make measurements in both directions at the same time. This technique has been used in optical astrometry, and it has yielded angular offsets between star pair measurements to accuracies of 5–10 nrad [Gat87].
6. Study of the optical technology
6.1. Metrics for modulation and coding solutions 1. Transmitter Complexity 2. Receiver Complexity (must include implied system requirements, e.g., a LO for coherent detection, or adaptive optics for atmospheric mitigation) 3. Power efficiency (bits/photon) 4. Bandwidth Efficiency (bits/s/Hz or bits/channel use) 5. Capability of adapting the data rate (metrics for modulations and coding schemes) 6. Capability of multiplexing (e.g. WDM) 7. Robustness to atmospheric or pointing fades 8. Robustness to background light (e.g., PPM strongly affected by background light, BPSK quasi immune)
6.2. Detection techniques A signal with a given modulation can be detected differently (e.g., coherently or incoherently). A detection model may be used to support a modulation or coding schemes, but the detection model will not be part of the recommendation.
Detection type Technology Possible modulations Remarks Direct PMTs, APDs, Intensity (OOK, PPM, detection PIN diodes …), or DPSK. Coherent LO Any. Rx limited to shot-noise detection superposition Photon Cooled receiver Intensity modulations counting Quantum Dolinar receiver Large gains theoretically possible, but technology relatively immature.
6.3. Modulations
6.4. Channel Coding
6.5. …
7. References
[Alo03] A. Alonso, M. Reyes, Z. Sodnik, “Performance of satellite-to-ground communications link between ARTEMIS and the Optical Ground Station”, Proceedings of SPIE 2003
[Gat87] G. D. Gatewood, “The Multichannel Astrometric Photometer and Atmospheric Limitations in the Measurement of Relative Precisions,” Astronomical Journal, vol. 94, no. 1, pp. 213–224, 1987. [Hem06] H. Hemmati (ed.), "Deep-space optical Communications", Wiley- Interscience (2006) [Int09] Statement of Work for ESA’s ITT Error! Style not defined., “Interplanetary Communications Technology Review and Roadmap”, April 2009
[Kud09] K. Kudielka, T. Dreischer, B. Thieme, M. Tuechler, "Experimental Demonstration of Optical Telemetry Transmission from Mars to Earth", International Conference on Space Optical Systems, Tokyo (2009)
[NAS09] NASA's Mission Operations and Communications Services, January 2009, http://deepspace.jpl.nasa.gov/advmiss/docs/NASA_MO&CS.pdf
[NASA07] “High-Capacity Communications From Martian Distances”, NASA/TM— 2007-214415 [Nul92a] G. W. Null, W. M. Owen, Jr., and S. P. Synnott, “Deep-Space Navigation Applications of Improved Ground-Based Optical Astrometry,” The Telecommunications and Data Acquisition Progress Report 42-110, April– June 1992, Jet Propulsion Laboratory, Pasadena, California, pp. 118–127, August 15, 1992. http://ipnpr.jpl.nasa.gov/progress_report/ [Nul92b] G. W. Null, W. M. Owen, Jr., and S. P. Synnott, “Systems Analysis for Ground-Based Optical Navigation,” The Telecommunications and Data Acquisition Progress Report 42-111, July–September 1992, Jet Propulsion Laboratory, Pasadena, California, pp. 23–40, November 15, 1992. http://ipnpr.jpl.nasa.gov/progress_report/ [Uni06] University of Washington, Department of Atmospheric Sciences. http://www.atmos.washington.edu/~ignatius/CloudMap/, 2006.
8. Acronyms
ADR Adaptive Data Rate BER Bit Error Rate BGL Background light BPSK Binary Phase Shift Keying DLR German Space Center DR Data Rate DPSK Differential Phase Shift Keying ECC European Cloud Climatology EO Electro Optical ESA European Space Agency FAR Focal Array Receiver FB Fabry-Perot FDM Frequency Division Multiplexing FSOC Free-Space Optical Communications FWD Forward (Link) GEO Geostationary GND Ground GS Ground Station JAXA Japan Aerospace Exploration Agency LA Link Availability LEO Low Earth Orbit LO Local Oscillator TDM Time Division Multiplexing WDM Wavelength Division Multiplexing w.r.t. with respect to