Flight Test of Navigation and Guidance Sensor Errors Measured on STOL Approaches
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Aviation Glossary
AVIATION GLOSSARY 100-hour inspection – A complete inspection of an aircraft operated for hire required after every 100 hours of operation. It is identical to an annual inspection but may be performed by any certified Airframe and Powerplant mechanic. Absolute altitude – The vertical distance of an aircraft above the terrain. AD - See Airworthiness Directive. ADC – See Air Data Computer. ADF - See Automatic Direction Finder. Adverse yaw - A flight condition in which the nose of an aircraft tends to turn away from the intended direction of turn. Aeronautical Information Manual (AIM) – A primary FAA publication whose purpose is to instruct airmen about operating in the National Airspace System of the U.S. A/FD – See Airport/Facility Directory. AHRS – See Attitude Heading Reference System. Ailerons – A primary flight control surface mounted on the trailing edge of an airplane wing, near the tip. AIM – See Aeronautical Information Manual. Air data computer (ADC) – The system that receives and processes pitot pressure, static pressure, and temperature to present precise information in the cockpit such as altitude, indicated airspeed, true airspeed, vertical speed, wind direction and velocity, and air temperature. Airfoil – Any surface designed to obtain a useful reaction, or lift, from air passing over it. Airmen’s Meteorological Information (AIRMET) - Issued to advise pilots of significant weather, but describes conditions with lower intensities than SIGMETs. AIRMET – See Airmen’s Meteorological Information. Airport/Facility Directory (A/FD) – An FAA publication containing information on all airports, seaplane bases and heliports open to the public as well as communications data, navigational facilities and some procedures and special notices. -

Module-7 Lecture-29 Flight Experiment
Module-7 Lecture-29 Flight Experiment: Instruments used in flight experiment, pre and post flight measurement of aircraft c.g. Module Agenda • Instruments used in flight experiments. • Pre and post flight measurement of center of gravity. • Experimental procedure for the following experiments. (a) Cruise Performance: Estimation of profile Drag coefficient (CDo ) and Os- walds efficiency (e) of an aircraft from experimental data obtained during steady and level flight. (b) Climb Performance: Estimation of Rate of Climb RC and Absolute and Service Ceiling from experimental data obtained during steady climb flight (c) Estimation of stick free and fixed neutral and maneuvering point using flight data. (d) Static lateral-directional stability tests. (e) Phugoid demonstration (f) Dutch roll demonstration 1 Instruments used for experiments1 1. Airspeed Indicator: The airspeed indicator shows the aircraft's speed (usually in knots ) relative to the surrounding air. It works by measuring the ram-air pressure in the aircraft's Pitot tube. The indicated airspeed must be corrected for air density (which varies with altitude, temperature and humidity) in order to obtain the true airspeed, and for wind conditions in order to obtain the speed over the ground. 2. Attitude Indicator: The attitude indicator (also known as an artificial horizon) shows the aircraft's relation to the horizon. From this the pilot can tell whether the wings are level and if the aircraft nose is pointing above or below the horizon. This is a primary instrument for instrument flight and is also useful in conditions of poor visibility. Pilots are trained to use other instruments in combination should this instrument or its power fail. -
Chapter: 4. Approaches
Chapter 4 Approaches Introduction This chapter discusses general planning and conduct of instrument approaches by pilots operating under Title 14 of the Code of Federal Regulations (14 CFR) Parts 91,121, 125, and 135. The operations specifications (OpSpecs), standard operating procedures (SOPs), and any other FAA- approved documents for each commercial operator are the final authorities for individual authorizations and limitations as they relate to instrument approaches. While coverage of the various authorizations and approach limitations for all operators is beyond the scope of this chapter, an attempt is made to give examples from generic manuals where it is appropriate. 4-1 Approach Planning within the framework of each specific air carrier’s OpSpecs, or Part 91. Depending on speed of the aircraft, availability of weather information, and the complexity of the approach procedure Weather Considerations or special terrain avoidance procedures for the airport of intended landing, the in-flight planning phase of an Weather conditions at the field of intended landing dictate instrument approach can begin as far as 100-200 NM from whether flight crews need to plan for an instrument the destination. Some of the approach planning should approach and, in many cases, determine which approaches be accomplished during preflight. In general, there are can be used, or if an approach can even be attempted. The five steps that most operators incorporate into their flight gathering of weather information should be one of the first standards manuals for the in-flight planning phase of an steps taken during the approach-planning phase. Although instrument approach: there are many possible types of weather information, the primary concerns for approach decision-making are • Gathering weather information, field conditions, windspeed, wind direction, ceiling, visibility, altimeter and Notices to Airmen (NOTAMs) for the airport of setting, temperature, and field conditions. -
OSR ISS ISU Rev 0
U.S. Department of Transportation Federal Aviation Administration Washington, DC Operational Suitability Report (OSR) Revision: Original Date: 08/06/2018 Innovative Solutions & Support Integrated Standby Unit with Autothrottle Christy Helgeson, Chair Flight Standardization Board (FSB) Federal Aviation Administration (FAA) Small Aircraft Branch 901 Locust Street, Room 332 Kansas City, MO 64106 Telephone: (816) 329-3238 Fax: (816) 329-3241 Innovative Solutions & Support Revision: Original Integrated Standby Unit with Autothrottle 08/06/2018 Operational Suitability Report TABLE OF CONTENTS Section Page RECORD OF REVISIONS .............................................................................................................3 1. PURPOSE AND APPLICABILITY ........................................................................................4 2. DESCRIPTION ........................................................................................................................4 3. PROCEDURES FOR USE OF THE ISU A/T .........................................................................7 4. SPECIFICATIONS FOR TRAINING AND CHECKING ......................................................7 2 of 7 Innovative Solutions & Support Revision: Original Integrated Standby Unit with Autothrottle 08/06/2018 Operational Suitability Report RECORD OF REVISIONS Revision Number Sections Date Original All 08/06/2018 3 of 7 Innovative Solutions & Support Revision: Original Integrated Standby Unit with Autothrottle 08/06/2018 Operational Suitability Report -

FAA-H-8083-15, Instrument Flying Handbook -- 1 of 2
i ii Preface This Instrument Flying Handbook is designed for use by instrument flight instructors and pilots preparing for instrument rating tests. Instructors may find this handbook a valuable training aid as it includes basic reference material for knowledge testing and instrument flight training. Other Federal Aviation Administration (FAA) publications should be consulted for more detailed information on related topics. This handbook conforms to pilot training and certification concepts established by the FAA. There are different ways of teaching, as well as performing, flight procedures and maneuvers and many variations in the explanations of aerodynamic theories and principles. This handbook adopts selected methods and concepts for instrument flying. The discussion and explanations reflect the most commonly used practices and principles. Occasionally the word “must” or similar language is used where the desired action is deemed critical. The use of such language is not intended to add to, interpret, or relieve a duty imposed by Title 14 of the Code of Federal Regulations (14 CFR). All of the aeronautical knowledge and skills required to operate in instrument meteorological conditions (IMC) are detailed. Chapters are dedicated to human and aerodynamic factors affecting instrument flight, the flight instruments, attitude instrument flying for airplanes, basic flight maneuvers used in IMC, attitude instrument flying for helicopters, navigation systems, the National Airspace System (NAS), the air traffic control (ATC) system, instrument flight rules (IFR) flight procedures, and IFR emergencies. Clearance shorthand and an integrated instrument lesson guide are also included. This handbook supersedes Advisory Circular (AC) 61-27C, Instrument Flying Handbook, which was revised in 1980. -

Study of the Pilot's Attention in the Cabin During the Flight Auxiliary Devices Such As Variometer, Turn Indicator with Crosswise Or Other
Journal of KONES Powertrain and Transport, Vol. 25, No. 3 2018 ISSN: 1231-4005 e-ISSN: 2354-0133 DOI: 10.5604/01.3001.0012.4309 STUDY OF THE PILOT’S ATTENTION IN THE CABIN DURING THE FLIGHT Mirosław Adamski, Mariusz Adamski, Ariel Adamski Polish Air Force Academy, Department of Aviation Dywizjonu 303 Street 35, 08-521 Deblin, Poland tel.: +48 261 517423, fax: +48 261 517421 e-mail: [email protected] [email protected], [email protected] Andrzej Szelmanowski Air Force Institute of Technology Ksiecia Boleslawa Street 6, 01-494 Warsaw, Poland tel.: +48 261 851603, fax: +48 261 851646 e-mail: [email protected] Abstract The pilot, while performing certain tasks or being in the battlefield environment works in a time lag. He is forced to properly interpret the information and quickly and correctly take action. Therefore, the instruments in the cabin should be arranged in such a way that they are legible and the operator have always-easy access to them. Due to the dynamics of the aircraft and the time needed to process the information by the pilot, a reaction delay occurs, resulting in the plane flying in an uncontrolled manner even up to several hundred meters. This article discusses the VFR and IFR flight characteristics, the pilot’s attention during flight, cabin ergonomics, and the placement of on-board instruments having a significant impact on the safety of the task performed in the air. In addition, tests have been carried out to determine exactly what the pilot’s eye is aimed at while completing the aerial task. -

GSW-8 Flight Instruments
GSW-8 Flight Instruments READING ASSIGNMENT PHAK Chapter 8 – Flight Instruments Study Questions 1. In addition to being able to read and interpret flight instruments, a pilot must also be able to a) build replacement flight instruments from spare parts. b) detect changes in altitude, airspeed, and heading using only body signals. c) recognize errors and malfunctions of these instruments during preflight inspection and in the air. Pitot-Static System 2. Impact air pressure is taken from the ___________________________________ , and ___________________________________ air pressure is usually taken from vents mounted flush with the fuselage. 3. A change in airspeed will affect the air pressure in which line of the pitot-static system? a) Static air pressure in the static line. b) Impact air pressure in the pitot line. c) Air pressure in both lines will change. 4. A change in altitude will affect the air pressure in which line of the pitot-static system? a) Static air pressure in the static line. b) Impact air pressure in the pitot line. GSW-8 c) Air pressure in both lines will change. 5. During preflight inspection, if a pilot notices a blocked or partially blocked static vent, how should it be ? resolved? a) The pilot should blow forcefully on the vent hole until the clog dislodges. b) A certificated mechanic should be notified so that he or she can remove the blockage. c) The clog will likely remove itself during slipping flight. 6. Which flight instrument uses impact pressure from the pitot line? ___________________________________________________________________________________ 7. Why do many planes have more than one static port? a) Multiple ports allow air pressure to equalize from one side of the airplane to the other. -
Dash8-200/300 - Flight Instruments
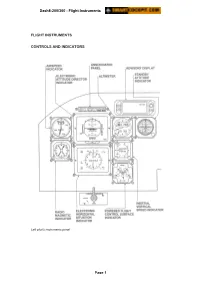
Dash8-200/300 - Flight Instruments FLIGHT INSTRUMENTS CONTROLS AND INDICATORS Left pilot’s instruments panel Page 1 Dash8-200/300 - Flight Instruments Right pilot’s instrument panel Page 2 Dash8-200/300 - Flight Instruments EADI EADI Attitude and heading reference system controller Page 3 Dash8-200/300 - Flight Instruments Airspeed indicator Page 4 Dash8-200/300 - Flight Instruments Primary altimeter Page 5 Dash8-200/300 - Flight Instruments Inertial vertical speed indicator with TCAS Page 6 Dash8-200/300 - Flight Instruments Radio magnetic indicator Page 7 Dash8-200/300 - Flight Instruments Stand-by attitude indicator Page 8 Dash8-200/300 - Flight Instruments IN MB 1021 Standby altimeter and standby magnetic compass Page 9 Dash8-200/300 - Flight Instruments or when button under glareshield is operated at the same time Davtron clock Page 10 Dash8-200/300 - Flight Instruments WX TERR EFIS controller Page 11 Dash8-200/300 - Flight Instruments WX TERR (WX/TERR) PUSH – displays (E)GPWS terrain map on the EHSI partial compass format PUSH – display will show EHSI data only, in partial compass format EFIS controller Page 12 Dash8-200/300 - Flight Instruments WX TERR EFIS controller Page 13 Dash8-200/300 - Flight Instruments Flight data recorder test switch Page 14 Dash8-200/300 - Flight Instruments Electronic Attitude Director Indicator (EADI) Page 15 Dash8-200/300 - Flight Instruments A LNAV or BC) Electronic Attitude Director Indicator (EADI) Page 16 Dash8-200/300 - Flight Instruments -- indicates active LNAV leg when selected Electronic Horizontal -

From the Cockpit to the Wrist
BASELWORLD 2013 - AVIATION COLLECTION FROM THE COCKPIT TO THE WRIST 1/9 BASELWORLD 2013 - AVIATION COLLECTION BELL & ROSS AND AERONAUTICAL INSTRUMENTATION The iconic BR 01 AVIATION collection is directly inspired by the instrumentation of aircraft cockpits, and addresses four fundamental requirements: legibility, functionality, precision and water-resistance. Pushing its exploration of aeronautical navigation instruments further, Bell & Ross innovates year after year with completely new high-tech models —BR 01 COMPASS in 2010, and RADAR in 2011—, offering a completely new way of reading time, inspired by flight instrumentation. In 2012, Bell & Ross introduced three new versions: BR 01 HORIZON, BR 01 ALTIMETER, and BR 01 TURN COORDINATOR. The result was a collection of exclusive watches with an innovative display and uncompromising legibility: an absolute priority for professionals and for every Bell & Ross watch. A NEW TRIO AND A REVISED INSTRUMENTATION PANEL In 2013, Bell & Ross is enhancing the AVIATION collection with three new instruments directly inspired by the cockpit, – HEADING indicator, AIRSPEED and CLIMB – and essential to flying and navigation. • The gyrocompass, course indicator or heading indicator, is a vital instrument for flying, used during both manual flight and autopilot, which indicates the course the plane is on. • The anemometer, or airspeed indicator, indicates speed. It measures an aircraft’s speed in relation to the air through which it is moving and allows the plane to be flown in a controlled way without visibility. • The variometer or vertical speed indicator, indicates to the pilot at all times whether the plane is ascending, descending or in level flight. This instrument works using atmospheric pressure and is graduated in hundreds of feet per minute. -
Chapter 420 Navigation Systems Equipment and Aids
S9086-NZ-STM-010/CH-420R1 REVISION 1 NAVAL SHIPS’ TECHNICAL MANUAL CHAPTER 420 NAVIGATION SYSTEMS, EQUIPMENT AND AIDS THIS CHAPTER SUPERSEDES CHAPTER 420 DATED 1 JUNE 1994 DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE, DISTRIBUTION IS UNLIMITED. PUBLISHED BY DIRECTION OF COMMANDER, NAVAL SEA SYSTEMS COMMAND. 1 SEP 1999 TITLE-1 @@FIpgtype@@TITLE@@!FIpgtype@@ S9086-NZ-STM-010/CH-420R1 Certification Sheet TITLE-2 S9086-NZ-STM-010/CH-420R1 TABLE OF CONTENTS Chapter/Paragraph Page 420 NAVIGATION SYSTEMS, EQUIPMENT AND AIDS ................ 420-1 SECTION 1. NAVIGATION SYSTEM, GENERAL REQUIREMENTS ............. 420-1 420-1.1 ORGANIZATION ..................................... 420-1 420-1.1.1 CHAPTER ORGANIZATION. .......................... 420-1 420-1.1.2 ESWBS SECTIONS. ............................... 420-1 420-1.1.3 REFERENCES. .................................. 420-1 420-1.1.3.1 Naval Ships’ Technical Manuals (NSTM). ............ 420-1 420-1.1.4 BULLETINS. ................................... 420-1 420-1.2 ADMINISTRATION INFORMATION .......................... 420-2 420-1.2.1 INTENT. ...................................... 420-2 420-1.2.2 RESPONSIBILITY ASSIGNMENTS. ...................... 420-2 420-1.2.3 TRAINING. .................................... 420-2 420-1.2.4 QUALIFIED REPAIR PERSONNEL. ...................... 420-2 420-1.2.4.1 Maintenance Responsibility. .................... 420-2 420-1.2.5 TEST AND REPAIR ACTIVITIES. ....................... 420-2 420-1.2.6 PARTS. ....................................... 420-2 420-1.2.6.1 Coordinated Shipboard Allowance List (COSAL). ........ 420-2 420-1.2.6.2 Equipment Selection. ........................ 420-3 420-1.2.7 EQUIPMENT INSTALLATION. ......................... 420-3 420-1.2.8 RECORDS AND REPORTS. ........................... 420-3 420-1.2.9 PREVENTIVE MAINTENANCE. ........................ 420-3 420-1.2.9.1 Routine Maintenance. ........................ 420-3 420-1.2.9.2 Safety Precautions. -

Glider Handbook, Chapter 4: Flight Instruments
Chapter 4 Flight Instruments Introduction Flight instruments in the glider cockpit provide information regarding the glider’s direction, altitude, airspeed, and performance. The categories include pitot-static, magnetic, gyroscopic, electrical, electronic, and self-contained. This categorization includes instruments that are sensitive to gravity (G-loading) and centrifugal forces. Instruments can be a basic set used typically in training aircraft or a more advanced set used in the high performance sailplane for cross- country and competition flying. To obtain basic introductory information about common aircraft instruments, please refer to the Pilot’s Handbook of Aeronautical Knowledge (FAA-H-8083-25). Instruments displaying airspeed, altitude, and vertical speed are part of the pitot-static system. Heading instruments display magnetic direction by sensing the earth’s magnetic field. Performance instruments, using gyroscopic principles, display the aircraft attitude, heading, and rates of turn. Unique to the glider cockpit is the variometer, which is part of the pitot-static system. Electronic instruments using computer and global positioning system (GPS) technology provide pilots with moving map displays, electronic airspeed and altitude, air mass conditions, and other functions relative to flight management. Examples of self-contained instruments and indicators that are useful to the pilot include the yaw string, inclinometer, and outside air temperature gauge (OAT). 4-1 Pitot-Static Instruments entering. Increasing the airspeed of the glider causes the force exerted by the oncoming air to rise. More air is able to There are two major divisions in the pitot-static system: push its way into the diaphragm and the pressure within the 1. Impact air pressure due to forward motion (flight) diaphragm increases. -

Table of Contents
PRODUCT CATALOG 2018 DIM PITCH SYNC TURN COORDINATOR 2 MIN L R KELLY MANUFACTURING COMPANY Wichita, Ks www.kellymfg.com February 2018 RC Allen Instruments / Kelly Manufacturing Company WWW.KELLYMFG.COM TABLE OF CONTENTS Contact Us .............................................................................. page 2 About Our Company ............................................................... page 3 New Products ESP Battery Backup ......................................................... page 4 RCA2610 Electric Digital Attitude Indicator ...................... page 6 RCA2610 Pitot-Static Electric Digital Attitude Indicator .... page 8 RCA1510 Electric Digital Heading Indicator ..................... page 10 ELT406-GPS Emergency Locator Transmitter ................. page 11 Ordering Your Attitude Indicator ......................................... page 12 Slip Indicator .................................................................... page 12 Fixed and Movable Pointers Diagram ................................. page 13 Electric Attitude Indicators RCA26EK Series .............................................................. page 14 RCA26AK & BK Series .................................................... page 16 Vacuum Horizon Indicators RCA22 Series .................................................................. page 19 Directional Gyro, Electric RCA15EK Series .............................................................. page 21 RCA15AK & BK Series .................................................... page 23 Directional Gyro,