Energy Dissipation Characteristics and Parameter Identification Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Potential Energyenergy Isis Storedstored Energyenergy Duedue Toto Anan Objectobject Location.Location
TypesTypes ofof EnergyEnergy && EnergyEnergy TransferTransfer HeatHeat (Thermal)(Thermal) EnergyEnergy HeatHeat (Thermal)(Thermal) EnergyEnergy . HeatHeat energyenergy isis thethe transfertransfer ofof thermalthermal energy.energy. AsAs heatheat energyenergy isis addedadded toto aa substances,substances, thethe temperaturetemperature goesgoes up.up. MaterialMaterial thatthat isis burning,burning, thethe Sun,Sun, andand electricityelectricity areare sourcessources ofof heatheat energy.energy. HeatHeat (Thermal)(Thermal) EnergyEnergy Thermal Energy Explained - Study.com SolarSolar EnergyEnergy SolarSolar EnergyEnergy . SolarSolar energyenergy isis thethe energyenergy fromfrom thethe Sun,Sun, whichwhich providesprovides heatheat andand lightlight energyenergy forfor Earth.Earth. SolarSolar cellscells cancan bebe usedused toto convertconvert solarsolar energyenergy toto electricalelectrical energy.energy. GreenGreen plantsplants useuse solarsolar energyenergy duringduring photosynthesis.photosynthesis. MostMost ofof thethe energyenergy onon thethe EarthEarth camecame fromfrom thethe Sun.Sun. SolarSolar EnergyEnergy Solar Energy - Defined and Explained - Study.com ChemicalChemical (Potential)(Potential) EnergyEnergy ChemicalChemical (Potential)(Potential) EnergyEnergy . ChemicalChemical energyenergy isis energyenergy storedstored inin mattermatter inin chemicalchemical bonds.bonds. ChemicalChemical energyenergy cancan bebe released,released, forfor example,example, inin batteriesbatteries oror food.food. ChemicalChemical (Potential)(Potential) -

The Spillway Design for the Dam's Height Over 300 Meters
E3S Web of Conferences 40, 05009 (2018) https://doi.org/10.1051/e3sconf/20184005009 River Flow 2018 The spillway design for the dam’s height over 300 meters Weiwei Yao1,*, Yuansheng Chen1, Xiaoyi Ma2,3,* , and Xiaobin Li4 1 Key Laboratory of Environmental Remediation, Institute of Geographic Sciences and Natural Resources Research, China Academy of Sciences, Beijing, 100101, China. 2 Key Laboratory of Carrying Capacity Assessment for Resource and Environment, Ministry of Land and Resources. 3 College of Water Resources and Architectural Engineering, Northwest A&F University, Yangling, Shaanxi 712100, P.R. China. 4 Powerchina Guiyang Engineering Corporation Limited, Guizhou, 550081, China. Abstract˖According the current hydropower development plan in China, numbers of hydraulic power plants with height over 300 meters will be built in the western region of China. These hydraulic power plants would be in crucial situation with the problems of high water head, huge discharge and narrow riverbed. Spillway is the most common structure in power plant which is used to drainage and flood release. According to the previous research, the velocity would be reaching to 55 m/s and the discharge can reach to 300 m3/s.m during spillway operation in the dam height over 300 m. The high velocity and discharge in the spillway may have the problems such as atomization nearby, slides on the side slope and river bank, Vibration on the pier, hydraulic jump, cavitation and the negative pressure on the spill way surface. All these problems may cause great disasters for both project and society. This paper proposes a novel method for flood release on high water head spillway which is named Rumei hydropower spillway located in the western region of China. -
An Overview on Principles for Energy Efficient Robot Locomotion
REVIEW published: 11 December 2018 doi: 10.3389/frobt.2018.00129 An Overview on Principles for Energy Efficient Robot Locomotion Navvab Kashiri 1*, Andy Abate 2, Sabrina J. Abram 3, Alin Albu-Schaffer 4, Patrick J. Clary 2, Monica Daley 5, Salman Faraji 6, Raphael Furnemont 7, Manolo Garabini 8, Hartmut Geyer 9, Alena M. Grabowski 10, Jonathan Hurst 2, Jorn Malzahn 1, Glenn Mathijssen 7, David Remy 11, Wesley Roozing 1, Mohammad Shahbazi 1, Surabhi N. Simha 3, Jae-Bok Song 12, Nils Smit-Anseeuw 11, Stefano Stramigioli 13, Bram Vanderborght 7, Yevgeniy Yesilevskiy 11 and Nikos Tsagarakis 1 1 Humanoids and Human Centred Mechatronics Lab, Department of Advanced Robotics, Istituto Italiano di Tecnologia, Genova, Italy, 2 Dynamic Robotics Laboratory, School of MIME, Oregon State University, Corvallis, OR, United States, 3 Department of Biomedical Physiology and Kinesiology, Simon Fraser University, Burnaby, BC, Canada, 4 Robotics and Mechatronics Center, German Aerospace Center, Oberpfaffenhofen, Germany, 5 Structure and Motion Laboratory, Royal Veterinary College, Hertfordshire, United Kingdom, 6 Biorobotics Laboratory, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 7 Robotics and Multibody Mechanics Research Group, Department of Mechanical Engineering, Vrije Universiteit Brussel and Flanders Make, Brussels, Belgium, 8 Centro di Ricerca “Enrico Piaggio”, University of Pisa, Pisa, Italy, 9 Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, United States, 10 Applied Biomechanics Lab, Department of Integrative Physiology, -

UNIVERSITY of CALIFONIA SANTA CRUZ HIGH TEMPERATURE EXPERIMENTAL CHARACTERIZATION of MICROSCALE THERMOELECTRIC EFFECTS a Dissert
UNIVERSITY OF CALIFONIA SANTA CRUZ HIGH TEMPERATURE EXPERIMENTAL CHARACTERIZATION OF MICROSCALE THERMOELECTRIC EFFECTS A dissertation submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in ELECTRICAL ENGINEERING by Tela Favaloro September 2014 The Dissertation of Tela Favaloro is approved: Professor Ali Shakouri, Chair Professor Joel Kubby Professor Nobuhiko Kobayashi Tyrus Miller Vice Provost and Dean of Graduate Studies Copyright © by Tela Favaloro 2014 This work is licensed under a Creative Commons Attribution- NonCommercial-NoDerivatives 4.0 International License Table of Contents List of Figures ............................................................................................................................ vi List of Tables ........................................................................................................................... xiv Nomenclature .......................................................................................................................... xv Abstract ................................................................................................................................. xviii Acknowledgements and Collaborations ................................................................................. xxi Chapter 1 Introduction .......................................................................................................... 1 1.1 Applications of thermoelectric devices for energy conversion ................................... 1 -

The Dissipation-Time Uncertainty Relation
The dissipation-time uncertainty relation Gianmaria Falasco∗ and Massimiliano Esposito† Complex Systems and Statistical Mechanics, Department of Physics and Materials Science, University of Luxembourg, L-1511 Luxembourg, Luxembourg (Dated: March 16, 2020) We show that the dissipation rate bounds the rate at which physical processes can be performed in stochastic systems far from equilibrium. Namely, for rare processes we prove the fundamental tradeoff hS˙eiT ≥ kB between the entropy flow hS˙ei into the reservoirs and the mean time T to complete a process. This dissipation-time uncertainty relation is a novel form of speed limit: the smaller the dissipation, the larger the time to perform a process. Despite operating in noisy environments, complex sys- We show in this Letter that the dissipation alone suf- tems are capable of actuating processes at finite precision fices to bound the pace at which any stationary (or and speed. Living systems in particular perform pro- time-periodic) process can be performed. To do so, we cesses that are precise and fast enough to sustain, grow set up the most appropriate framework to describe non- and replicate themselves. To this end, nonequilibrium transient operations. Namely, we unambiguously define conditions are required. Indeed, no process that is based the process duration by the first-passage time for an ob- on a continuous supply of (matter, energy, etc.) currents servable to reach a given threshold [20–23]. We first de- can take place without dissipation. rive a bound for the rate of the process r, uniquely spec- Recently, an intrinsic limitation on precision set by dis- ified by the survival probability that the process is not sipation has been established by thermodynamic uncer- yet completed at time t [24]. -

Estimation of the Dissipation Rate of Turbulent Kinetic Energy: a Review
Chemical Engineering Science 229 (2021) 116133 Contents lists available at ScienceDirect Chemical Engineering Science journal homepage: www.elsevier.com/locate/ces Review Estimation of the dissipation rate of turbulent kinetic energy: A review ⇑ Guichao Wang a, , Fan Yang a,KeWua, Yongfeng Ma b, Cheng Peng c, Tianshu Liu d, ⇑ Lian-Ping Wang b,c, a SUSTech Academy for Advanced Interdisciplinary Studies, Southern University of Science and Technology, Shenzhen 518055, PR China b Guangdong Provincial Key Laboratory of Turbulence Research and Applications, Center for Complex Flows and Soft Matter Research and Department of Mechanics and Aerospace Engineering, Southern University of Science and Technology, Shenzhen 518055, Guangdong, China c Department of Mechanical Engineering, 126 Spencer Laboratory, University of Delaware, Newark, DE 19716-3140, USA d Department of Mechanical and Aeronautical Engineering, Western Michigan University, Kalamazoo, MI 49008, USA highlights Estimate of turbulent dissipation rate is reviewed. Experimental works are summarized in highlight of spatial/temporal resolution. Data processing methods are compared. Future directions in estimating turbulent dissipation rate are discussed. article info abstract Article history: A comprehensive literature review on the estimation of the dissipation rate of turbulent kinetic energy is Received 8 July 2020 presented to assess the current state of knowledge available in this area. Experimental techniques (hot Received in revised form 27 August 2020 wires, LDV, PIV and PTV) reported on the measurements of turbulent dissipation rate have been critically Accepted 8 September 2020 analyzed with respect to the velocity processing methods. Traditional hot wires and LDV are both a point- Available online 12 September 2020 based measurement technique with high temporal resolution and Taylor’s frozen hypothesis is generally required to transfer temporal velocity fluctuations into spatial velocity fluctuations in turbulent flows. -

Energetics of a Turbulent Ocean
Energetics of a Turbulent Ocean Raffaele Ferrari January 12, 2009 1 Energetics of a Turbulent Ocean One of the earliest theoretical investigations of ocean circulation was by Count Rumford. He proposed that the meridional overturning circulation was driven by temperature gradients. The ocean cools at the poles and is heated in the tropics, so Rumford speculated that large scale convection was responsible for the ocean currents. This idea was the precursor of the thermohaline circulation, which postulates that the evaporation of water and the subsequent increase in salinity also helps drive the circulation. These theories compare the oceans to a heat engine whose energy is derived from solar radiation through some convective process. In the 1800s James Croll noted that the currents in the Atlantic ocean had a tendency to be in the same direction as the prevailing winds. For example the trade winds blow westward across the mid-Atlantic and drive the Gulf Stream. Croll believed that the surface winds were responsible for mechanically driving the ocean currents, in contrast to convection. Although both Croll and Rumford used simple theories of fluid dynamics to develop their ideas, important qualitative features of their work are present in modern theories of ocean circulation. Modern physical oceanography has developed a far more sophisticated picture of the physics of ocean circulation, and modern theories include the effects of phenomena on a wide range of length scales. Scientists are interested in understanding the forces governing the ocean circulation, and one way to do this is to derive energy constraints on the differ- ent processes in the ocean. -
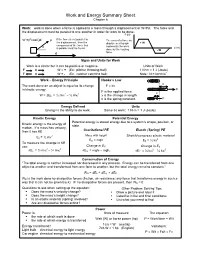
Work and Energy Summary Sheet Chapter 6
Work and Energy Summary Sheet Chapter 6 Work: work is done when a force is applied to a mass through a displacement or W=Fd. The force and the displacement must be parallel to one another in order for work to be done. F (N) W =(Fcosθ)d F If the force is not parallel to The area of a force vs. the displacement, then the displacement graph + W component of the force that represents the work θ d (m) is parallel must be found. done by the varying - W d force. Signs and Units for Work Work is a scalar but it can be positive or negative. Units of Work F d W = + (Ex: pitcher throwing ball) 1 N•m = 1 J (Joule) F d W = - (Ex. catcher catching ball) Note: N = kg m/s2 • Work – Energy Principle Hooke’s Law x The work done on an object is equal to its change F = kx in kinetic energy. F F is the applied force. 2 2 x W = ΔEk = ½ mvf – ½ mvi x is the change in length. k is the spring constant. F Energy Defined Units Energy is the ability to do work. Same as work: 1 N•m = 1 J (Joule) Kinetic Energy Potential Energy Potential energy is stored energy due to a system’s shape, position, or Kinetic energy is the energy of state. motion. If a mass has velocity, Gravitational PE Elastic (Spring) PE then it has KE 2 Mass with height Stretch/compress elastic material Ek = ½ mv 2 EG = mgh EE = ½ kx To measure the change in KE Change in E use: G Change in ES 2 2 2 2 ΔEk = ½ mvf – ½ mvi ΔEG = mghf – mghi ΔEE = ½ kxf – ½ kxi Conservation of Energy “The total energy is neither increased nor decreased in any process. -
Innovation Insights Brief | 2020
FIVE STEPS TO ENERGY STORAGE Innovation Insights Brief | 2020 In collaboration with the California Independent System Operator (CAISO) ABOUT THE WORLD ENERGY COUNCIL ABOUT THIS INSIGHTS BRIEF The World Energy Council is the principal impartial This Innovation Insights brief on energy storage is part network of energy leaders and practitioners promoting of a series of publications by the World Energy Council an affordable, stable and environmentally sensitive focused on Innovation. In a fast-paced era of disruptive energy system for the greatest benefit of all. changes, this brief aims at facilitating strategic sharing of knowledge between the Council’s members and the Formed in 1923, the Council is the premiere global other energy stakeholders and policy shapers. energy body, representing the entire energy spectrum, with over 3,000 member organisations in over 90 countries, drawn from governments, private and state corporations, academia, NGOs and energy stakeholders. We inform global, regional and national energy strategies by hosting high-level events including the World Energy Congress and publishing authoritative studies, and work through our extensive member network to facilitate the world’s energy policy dialogue. Further details at www.worldenergy.org and @WECouncil Published by the World Energy Council 2020 Copyright © 2020 World Energy Council. All rights reserved. All or part of this publication may be used or reproduced as long as the following citation is included on each copy or transmission: ‘Used by permission of the World -
Hydroelectric Power -- What Is It? It=S a Form of Energy … a Renewable Resource
INTRODUCTION Hydroelectric Power -- what is it? It=s a form of energy … a renewable resource. Hydropower provides about 96 percent of the renewable energy in the United States. Other renewable resources include geothermal, wave power, tidal power, wind power, and solar power. Hydroelectric powerplants do not use up resources to create electricity nor do they pollute the air, land, or water, as other powerplants may. Hydroelectric power has played an important part in the development of this Nation's electric power industry. Both small and large hydroelectric power developments were instrumental in the early expansion of the electric power industry. Hydroelectric power comes from flowing water … winter and spring runoff from mountain streams and clear lakes. Water, when it is falling by the force of gravity, can be used to turn turbines and generators that produce electricity. Hydroelectric power is important to our Nation. Growing populations and modern technologies require vast amounts of electricity for creating, building, and expanding. In the 1920's, hydroelectric plants supplied as much as 40 percent of the electric energy produced. Although the amount of energy produced by this means has steadily increased, the amount produced by other types of powerplants has increased at a faster rate and hydroelectric power presently supplies about 10 percent of the electrical generating capacity of the United States. Hydropower is an essential contributor in the national power grid because of its ability to respond quickly to rapidly varying loads or system disturbances, which base load plants with steam systems powered by combustion or nuclear processes cannot accommodate. Reclamation=s 58 powerplants throughout the Western United States produce an average of 42 billion kWh (kilowatt-hours) per year, enough to meet the residential needs of more than 14 million people. -

Turbine By-Pass with Energy Dissipation System for Transient Control
September 2014 Page 1 TURBINE BY-PASS WITH ENERGY DISSIPATION SYSTEM FOR TRANSIENT CONTROL J. Gale, P. Brejc, J. Mazij and A. Bergant Abstract: The Energy Dissipation System (EDS) is a Hydro Power Plant (HPP) safety device designed to prevent pressure rise in the water conveyance system and to prevent turbine runaway during the transient event by bypassing water flow away from the turbine. The most important part of the EDS is a valve whose operation shall be synchronized with the turbine guide vane apparatus. The EDS is installed where classical water hammer control devices are not feasible or are not economically acceptable due to certain requirements. Recent manufacturing experiences show that environmental restrictions revive application of the EDS. Energy dissipation: what, why, where, how, ... Each hydropower plant’s operation depends on available water potential and on the other hand (shaft) side, it depends on electricity consumption/demand. During the years of operation every HPP occasionally encounters also some specific operating conditions like for example significant sudden changes of power load change, or for example emergency shutdown. During such rapid changes of the HPP’s operation, water hammer and possible turbine runaway inevitably occurs. Hydraulic transients are disturbances of flow in the pipeline which are initiated by a change from one steady state to another. The main disturbance is a pressure wave whose magnitude depends on the speed of change (slow - fast) and difference between the initial and the final state (full discharge – zero discharge). Numerous pressure waves are propagating along the hydraulic water conveyance system and they represent potential risk of damaging the water conveyance system as well as water turbine in the case of inappropriate design. -

Evaluating the Transient Energy Dissipation in a Centrifugal Impeller Under Rotor-Stator Interaction
Article Evaluating the Transient Energy Dissipation in a Centrifugal Impeller under Rotor-Stator Interaction Ran Tao, Xiaoran Zhao and Zhengwei Wang * 1 Department of Energy and Power Engineering, Tsinghua University, Beijing 100084, China; [email protected] (R.T.); [email protected] (X.Z.) * Correspondence: [email protected] Received: 20 February 2019; Accepted: 8 March 2019; Published: 11 March 2019 Abstract: In fluid machineries, the flow energy dissipates by transforming into internal energy which performs as the temperature changes. The flow-induced noise is another form that flow energy turns into. These energy dissipations are related to the local flow regime but this is not quantitatively clear. In turbomachineries, the flow regime becomes pulsating and much more complex due to rotor-stator interaction. To quantitatively understand the energy dissipations during rotor-stator interaction, the centrifugal air pump with a vaned diffuser is studied based on total energy modeling, turbulence modeling and acoustic analogy method. The numerical method is verified based on experimental data and applied to further simulation and analysis. The diffuser blade leading-edge site is under the influence of impeller trailing-edge wake. The diffuser channel flow is found periodically fluctuating with separations from the blade convex side. Stall vortex is found on the diffuser blade trailing-edge near outlet. High energy loss coefficient sites are found in the undesirable flow regions above. Flow-induced noise is also high in these sites except in the stall vortex. Frequency analyses show that the impeller blade frequency dominates in the diffuser channel flow except in the outlet stall vortexes.