Towards a Formally Verified Space Mission Software Using SPARK
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

New Moon Explorer Mission Concept
New Moon Explorer Mission Concept Les JOHNSONa,*, John CARRa,Jared Jared DERVANa, Alexander FEWa, Andy HEATONa, Benjamin Malphrusd, Leslie MCNUTTa, Joe NUTHb, Dana Tursec, and Aaron Zuchermand aNASA MSFC, Huntsville, AL USA bNASA GSFC, Huntsville, AL USA cRoccor, Longmont, CO USA dMorehead State University, Morehead, KY USA Abstract New Moon Explorer (NME) is a smallsat reconnaissance mission concept to explore Earth’s ‘New Moon’, the recently discovered Earth orbital companion asteroid 469219 Kamoʻoalewa (formerly 2016HO3), using solar sail propulsion. NME would determine Kamoʻoalewa’s spin rate, pole position, shape, structure, mass, density, chemical composition, temperature, thermal inertia, regolith characteristics, and spectral type using onboard instrumentation. If flown, NME would demonstrate multiple enabling technologies, including solar sail propulsion, large-area thin film power generation, and small spacecraft technology tailored for interplanetary space missions. Leveraging the solar sail technology and mission expertise developed by NASA for the Near Earth Asteroid (NEA) Scout mission, affordably learning more about our newest near neighbor is now a possibility. The mission is not yet planned for flight. Keywords: Kamoʻoalewa, solar sail, moon, Apollo asteroid 1. Introduction The emerging capabilities of extremely small spacecraft, coupled with solar sail propulsion, offers an opportunity for low-cost reconnaissance of the recently- discovered asteroid 469219 Kamoʻoalewa (formerly 2016HO3). While Kamoʻoalewa is not strictly a new moon, it is, for all practical purposes, an orbital companion of the Earth as the planet circles the sun. Kamoʻoalewa’s orbit relative to the Earth can be seen in Figure 1. Using the technologies developed for the NASA Fig. 1 The orbit of Earth’s companion, Kamoʻoalewa Near Earth Asteroid (NEA) Scout mission, a 6U as both it and the Earth orbit the Sun. -

The Cubesat Mission to Study Solar Particles (Cusp) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021)
The CubeSat Mission to Study Solar Particles (CuSP) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021) Acknowledgements – National Aeronautics and Space Administration (NASA) and CuSP Principal Investigator, Dr. Mihir Desai, Southwest Research Institute (SwRI) Feature Articles in SYSTEMS Magazine Three-part special series on Artemis I CubeSats - April 2019 (CuSP, IceCube, ArgoMoon, EQUULEUS/OMOTENASHI, & DSN) ▸ - September 2019 (CisLunar Explorers, OMOTENASHI & Iris Transponder) - March 2020 (BioSentinnel, Near-Earth Asteroid Scout, EQUULEUS, Lunar Flashlight, Lunar Polar Hydrogen Mapper, & Δ-Differential One-Way Range) Available in the AESS Resource Center https://resourcecenter.aess.ieee.org/ ▸Free for AESS members ▸ What are CubeSats? A class of small research spacecraft Built to standard dimensions (Units or “U”) ▸ - 1U = 10 cm x 10 cm x 11 cm (Roughly “cube-shaped”) ▸ - Modular: 1U, 2U, 3U, 6U or 12U in size - Weigh less than 1.33 kg per U NASA's CubeSats are dispensed from a deployer such as a Poly-Picosatellite Orbital Deployer (P-POD) ▸NASA’s CubeSat Launch initiative (CSLI) provides opportunities for small satellite payloads to fly on rockets ▸planned for upcoming launches. These CubeSats are flown as secondary payloads on previously planned missions. https://www.nasa.gov/directorates/heo/home/CubeSats_initiative What is CuSP? NASA Science Mission Directorate sponsored Heliospheric Science Mission selected in June 2015 to be launched on Artemis I. ▸ https://www.nasa.gov/feature/goddard/2016/heliophys ics-cubesat-to-launch-on-nasa-s-sls Support space weather research by determining proton radiation levels during solar energetic particle events and identifying suprathermal properties that could help ▸ predict geomagnetic storms. -
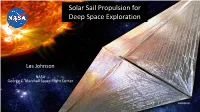
Solar Sail Propulsion for Deep Space Exploration
Solar Sail Propulsion for Deep Space Exploration Les Johnson NASA George C. Marshall Space Flight Center NASA Image We tend to think of space as being big and empty… NASA Image Space Is NOT Empty. We can use the environments of space to our advantage NASA Image Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. 4 NASA Image Real Solar Sails Are Not “Ideal” Billowed Quadrant Diffuse Reflection 4 Thrust Vector Components 4 Solar Sail Trajectory Control Solar Radiation Pressure allows inward or outward Spiral Original orbit Sail Force Force Sail Shrinking orbit Expanding orbit Solar Sails Experience VERY Small Forces NASA Image 8 Solar Sail Missions Flown Image courtesy of Univ. Surrey NASA Image Image courtesy of JAXA Image courtesy of The Planetary Society NanoSail-D (2010) IKAROS (2010) LightSail-1 & 2 CanX-7 (2016) InflateSail (2017) NASA JAXA (2015/2019) Canada EU/Univ. of Surrey The Planetary Society Earth Orbit Interplanetary Earth Orbit Earth Orbit Deployment Only Full Flight Earth Orbit Deployment Only Deployment Only Deployment / Flight 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 10 m2 196 m2 3U CubeSat <10 m2 10 m2 32 m2 9 Planned Solar Sail Missions NASA Image NASA Image NASA Image Near Earth Asteroid Scout Advanced Composite Solar Solar Cruiser (2025) NASA (2021) NASA Sail System (TBD) NASA Interplanetary Interplanetary Earth Orbit Full Flight Full Flight Full Flight 100 kg spacecraft 6U CubeSat 12U CubeSat 1653 m2 86 -

DMC Grants Since Inception.Xlsm
Grants Since Inception as of April 7, 2020 Grant Total Grant Board Approval Organization Name Number Grant Purpose Amount September Wayne State University School of 20131771 Support for the Henry L. Brasza Endowed $ 51,885.00 2013 Medicine Directorship of the Center for Molecular Medicine and Genetics to link the understanding of diabetes and its complications at the molecular level with clinical investigations into the strategies to treat, Wayne State University School of 20131772 Supportprevent and for thecure Marie diabetes E. Brasza Endowed Chair in $ 51,255.00 Medicine Gynecologic Oncology to advance research involving cancer of the ovaries, cervix and uterus Wayne State University School of 20131774 Support for the Lambert/Webber Endowed Chair for $ 121,907.00 Medicine Hematology/Oncology to support research Wayne State University School of 20131775 Support for the Parker-Webber Endowed Chair in $ 84,414.00 Medicine Neurology for academic pursuits and neurological research by the individual named to hold the chair Wayne State University School of 20131776 Support for the Dong H. Shin, M.D., Ph.D. Endowed $ 31,277.00 Medicine Professorship in Ophthalmology & Glaucoma Research for glaucoma research. education or Wayne State University School of 20131777 Supportpatient care for theactivities Fann Srere Endowed Chair in $ 74,268.00 Medicine Perinatal Medicine for development, maintenance and application of services and programs to benefit pregnant women and newborn infants, and to facilitate innovative perinatal research Grants Since Inception as of April 7, 2020 Grant Total Grant Board Approval Organization Name Number Grant Purpose Amount Wayne State University School of 20131778 Support for the Edward S. -

Efficient Radar Forward Operator for Operational Data Assimilation
Efficient Radar Forward Operator for Operational Data Assimilation within the COSMO-model Zur Erlangung des akademischen Grades eines DOKTORS DER NATURWISSENSCHAFTEN von der Fakultät für Physik des Karlsruher Instituts für Technologie (KIT) genehmigte DISSERTATION von Dipl.-Math. Yuefei Zeng aus Fujian, China Tag der mündlichen Prüfung: 05.07.2013 Referent: Prof. Dr. Klaus D. Beheng Korreferent: Prof. Dr. Christoph Kottmeier Abstract The new weather radar network of the German Weather Service (DWD) will, after its complete update in 2014, comprise 17 dual-polarimetric C-Band Doppler radars evenly distributed throughout Germany for complete coverage. They provide unique 3-dimensional information about dynamical and microphysical characteristics of precipi- tating clouds in high spatial and temporal resolutions. Up to now, these data are not used in the operational COSMO-model of DWD except within the framework of the latent heat nudging and for a simple nudging method of Doppler velocity. Future applications are, however, planned to take better advantage of radar data within an upcoming new 4-Dimensional Local Ensemble Transform Kalman Filter (4D-LETKF) data assimilation system, which will be based on the operational convective-scale ensemble prediction system (EPS) COSMO-DE-EPS (grid spacing of 2.8 km, rapid update cycle, Central Europe domain). It is assumed that the assimilation of weather radar data is a promising means for improvements of short-term precipitation forecasts, especially in convective situations. However, the observed quantities (reflectivity, Doppler velocity and polarization prop- erties) are not directly comparable to the prognostic variables of the numerical model. In order to, on one hand, enable radar data assimilation in the framework of the above- mentioned 4D-LETKF-assimilation system and, on the other hand, to facilitate compar- isons of numerical simulations with radar observations in the context of cloud micro- physics verification, a comprehensive modular radar forward operator has been developed. -

Developing Technologies for Biological Experiments in Deep Space
Developing technologies for biological experiments in deep space Sergio R. Santa Maria Elizabeth Hawkins Ada Kanapskyte NASA Ames Research Center [email protected] NASA’s life science programs STS-1 (1981) STS-135 (2011) 1973 – 1974 1981 - 2011 2000 – 2006 – Space Shuttle International Skylab Bio CubeSats Program Space Station Microgravity effects - Nausea / vomit - Disorientation & sleep loss - Body fluid redistribution - Muscle & bone loss - Cardiovascular deconditioning - Increase pathogenicity in microbes Interplanetary space radiation What type of radiation are we going to encounter beyond low Earth orbit (LEO)? Galactic Cosmic Rays (GCRs): - Interplanetary, continuous, modulated by the 11-year solar cycle - High-energy protons and highly charged, energetic heavy particles (Fe-56, C-12) - Not effectively shielded; can break up into lighter, more penetrating pieces Challenges: biology effects poorly understood (but most hazardous) Interplanetary space radiation Solar Particle Events (SPEs) - Interplanetary, sporadic, transient (several min to days) - High proton fluxes (low and medium energy) - Largest doses occur during maximum solar activity Challenges: unpredictable; large doses in a short time Space radiation effects Space radiation is the # 1 risk to astronaut health on extended space exploration missions beyond the Earth’s magnetosphere • Immune system suppression, learning and memory impairment have been observed in animal models exposed to mission-relevant doses (Kennedy et al. 2011; Britten et al. 2012) • Low doses of space radiation are causative of an increased incidence and early appearance of cataracts in astronauts (Cuccinota et al. 2001) • Cardiovascular disease mortality rate among Apollo lunar astronauts is 4-5-fold higher than in non-flight and LEO astronauts (Delp et al. -

Open Research Online Oro.Open.Ac.Uk
Open Research Online The Open University’s repository of research publications and other research outputs Oxia Planum: The Landing Site for the ExoMars “Rosalind Franklin” Rover Mission: Geological Context and Prelanding Interpretation Journal Item How to cite: Quantin-Nataf, Cathy; Carter, John; Mandon, Lucia; Thollot, Patrick; Balme, Matthew; Volat, Matthieu; Pan, Lu; Loizeau, Damien; Millot, Cédric; Breton, Sylvain; Dehouck, Erwin; Fawdon, Peter; Gupta, Sanjeev; Davis, Joel; Grindrod, Peter M.; Pacifici, Andrea; Bultel, Benjamin; Allemand, Pascal; Ody, Anouck; Lozach, Loic and Broyer, Jordan (2021). Oxia Planum: The Landing Site for the ExoMars “Rosalind Franklin” Rover Mission: Geological Context and Prelanding Interpretation. Astrobiology, 21(3) For guidance on citations see FAQs. c 2020 Cathy Quantin-Nataf et al. https://creativecommons.org/licenses/by/4.0/ Version: Version of Record Link(s) to article on publisher’s website: http://dx.doi.org/doi:10.1089/ast.2019.2191 Copyright and Moral Rights for the articles on this site are retained by the individual authors and/or other copyright owners. For more information on Open Research Online’s data policy on reuse of materials please consult the policies page. oro.open.ac.uk ASTROBIOLOGY Volume 21, Number 3, 2021 Research Article Mary Ann Liebert, Inc. DOI: 10.1089/ast.2019.2191 Oxia Planum: The Landing Site for the ExoMars ‘‘Rosalind Franklin’’ Rover Mission: Geological Context and Prelanding Interpretation Cathy Quantin-Nataf,1 John Carter,2 Lucia Mandon,1 Patrick Thollot,1 Matthew Balme,3 Matthieu Volat,1 Lu Pan,1 Damien Loizeau,1,2 Ce´dric Millot,1 Sylvain Breton,1 Erwin Dehouck,1 Peter Fawdon,3 Sanjeev Gupta,4 Joel Davis,5 Peter M. -

KPLO, ISECG, Et Al…
NationalNational Aeronautics Aeronautics and Space and Administration Space Administration KPLO, ISECG, et al… Ben Bussey Chief Exploration Scientist Human Exploration & Operations Mission Directorate, NASA HQ 1 Strategic Knowledge Gaps • SKGs define information that is useful/mandatory for designing human spaceflight architecture • Perception is that SKGs HAVE to be closed before we can go to a destination, i.e. they represent Requirements • In reality, there is very little information that is a MUST HAVE before we go somewhere with humans. What SKGs do is buy down risk, allowing you to design simpler/cheaper systems. • There are three flavors of SKGs 1. Have to have – Requirements 2. Buys down risk – LM foot pads 3. Mission enhancing – Resources • Four sets of SKGs – Moon, Phobos & Deimos, Mars, NEOs www.nasa.gov/exploration/library/skg.html 2 EM-1 Secondary Payloads 13 CUBESATS SELECTED TO FLY ON INTERIM EM-1 CRYOGENIC PROPULSION • Lunar Flashlight STAGE • Near Earth Asteroid Scout • Bio Sentinel • LunaH-MAP • CuSPP • Lunar IceCube • LunIR • EQUULEUS (JAXA) • OMOTENASHI (JAXA) • ArgoMoon (ESA) • STMD Centennial Challenge Winners 3 3 3 Lunar Flashlight Overview Looking for surface ice deposits and identifying favorable locations for in-situ utilization in lunar south pole cold traps Measurement Approach: • Lasers in 4 different near-IR bands illuminate the lunar surface with a 3° beam (1 km spot). Orbit: • Light reflected off the lunar • Elliptical: 20-9,000 km surface enters the spectrometer to • Orbit Period: 12 hrs distinguish water -

Payload Design for the Lunar Flashlight Mission
Lunar and Planetary Science XLVIII (2017) 1709.pdf Payload Design For The Lunar Flashlight Mission. B. A. Cohen1, P. O. Hayne2, B. T. Greenhagen3, D. A. Paige4, J. M. Camacho2, K. Crabtree5, C. Paine2, R. G. Sellar5; 1NASA Marshall Space Flight Center, Huntsville AL 35812 ([email protected]), 2Jet Propulsion Laboratory, Pasadena CA 91109, 3Applied Physics Laboratory, Johns Hopkins University, Laurel MD 20723, 4UCLA, Los Angeles, CA 90095, 5 Photon Engineering, Tucson AZ 85711. Introduction: Recent reflectance data from LRO lengths in rapid sequence, while a receiver system de- instruments suggest water ice and other volatiles may tects the reflected light. Derived reflectance and water be present on the surface in lunar permanently- ice band depths will be mapped onto the lunar surface shadowed regions, though the detection is not yet de- in order to identify locations where H2O ice is present finitive [1-3]. Understanding the composition, quanti- at or above 0.5 wt% concentration. ty, distribution, and form of water and other volatiles In the past year, we have advanced the design for associated with lunar permanently shadowed regions the Lunar Flashlight payload to meet our measurement (PSRs) is identified as a Strategic Knowledge Gap requirement within the limited mass and power availa- (SKG) for NASA’s human exploration program. These ble for the instrument system. We optimized the laser polar volatile deposits are also scientifically interest- wavelengths for maximum sensitivity to water ice ab- ing, having potential to reveal important information sorption bands. The selected wavelengths are 1.064 (- about the delivery of water to the Earth-Moon system. -

The Space Exposure Platforms BIOPAN and EXPOSE to Study
The space exposure platforms BIOPAN and EXPOSE to study living organisms in space Wolfgang Schulte (1), Pietro Baglioni (2), René Demets (2), Ralf von Heise-Rotenburg (1), Petra Rettberg (3) (1) Kayser-Threde GmbH, Wolfratshauser Str. 48, 81379 Munich, Germany, [email protected], Phone: +49-89-72495-225, Fax: +49-89-72495-215; [email protected], Phone: +49-89-72495-341, Fax: +49-89-72495-215 (2) European Space Agency ESA/ESTEC, Keplerlaan 1, 2201 AZ Noordwijk, The Netherlands, [email protected], Phone + 31-71-565-3856, Fax +31-71-565-3141; [email protected], Phone +31-71-565-5081, Fax +31-71-565-3141 (3) German Aerospace Center (DLR e.V.), Institute of Aerospace Medicine, Linder Höhe, 51147 Köln, Germany, [email protected], Phone +49-2203-601-4637, Fax +49-2203-61970 BIOPAN and EXPOSE are two European space exposure platforms, developed for the European Space Agency by Kayser-Threde GmbH, Munich/Germany to offer flight opportunities to the science community of exo/astrobiology research in low earth orbit. Both platforms are conceived for the research on the behaviour of living organisms in the environment of space and on simulated conditions of other planets (Mars). The conditions for a possible transfer of life between planets can be studied. Both facilities can also be used for materials and components validation and as test bed for advanced technologies envisaged for future exploration missions (radio-protection, miniaturized devices, electronic components). Since 1992 BIOPAN has flown five times aboard the Russian FOTON re-entry cap- sule. -
Download the Acquired Data Or to Fix Possible Problem
Università degli Studi di Napoli Federico II DOTTORATO DI RICERCA IN FISICA Ciclo 30° Coordinatore: Prof. Salvatore Capozziello Settore Scientifico Disciplinare FIS/05 Characterisation of dust events on Earth and Mars the ExoMars/DREAMS experiment and the field campaigns in the Sahara desert Dottorando Tutore Gabriele Franzese dr. Francesca Esposito Anni 2014/2018 A birbetta e giggione che sono andati troppo veloci e a patata che invece adesso va piano piano Summary Introduction ......................................................................................................................... 6 Chapter 1 Atmospheric dust on Earth and Mars............................................................ 9 1.1 Mineral Dust ....................................................................................................... 9 1.1.1 Impact on the Terrestrial land-atmosphere-ocean system .......................... 10 1.1.1.1 Direct effect ......................................................................................... 10 1.1.1.2 Semi-direct and indirect effects on the cloud physics ......................... 10 1.1.1.3 Indirect effects on the biogeochemical system .................................... 11 1.1.1.4 Estimation of the total effect ............................................................... 11 1.2 Mars .................................................................................................................. 12 1.2.1 Impact on the Martian land-atmosphere system ......................................... 13 1.3 -

A Review of Rosetta's Observations of 67P/Churyumov-Gerasimenko
Surface Morphology of Comets and Associated Evolutionary Processes: A Review of Rosetta’s Observations of 67P/Churyumov-Gerasimenko M. El-Maarry, O. Groussin, H. Keller, N. Thomas, J.-B. Vincent, S. Mottola, M. Pajola, K. Otto, C. Herny, S. Krasilnikov To cite this version: M. El-Maarry, O. Groussin, H. Keller, N. Thomas, J.-B. Vincent, et al.. Surface Morphology of Comets and Associated Evolutionary Processes: A Review of Rosetta’s Observations of 67P/Churyumov- Gerasimenko. Space Science Reviews, Springer Verlag, 2019, 215 (4), pp.36. 10.1007/s11214-019- 0602-1. hal-02496603 HAL Id: hal-02496603 https://hal.archives-ouvertes.fr/hal-02496603 Submitted on 3 Mar 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Space Sci Rev (2019) 215:36 https://doi.org/10.1007/s11214-019-0602-1 Surface Morphology of Comets and Associated Evolutionary Processes: A Review of Rosetta’s Observations of 67P/Churyumov–Gerasimenko M.R. El-Maarry1 · O. Groussin2 · H.U. Keller3 · N. Thomas4 · J.-B. Vincent5 · S. Mottola5 · M. Pajola6 · K. Otto5 · C. Herny4 · S. Krasilnikov7,8 Received: 19 November 2018 / Accepted: 21 May 2019 / Published online: 12 June 2019 © The Author(s) 2019 Abstract Comets can be regarded as active planetary bodies because they display evidence for nearly all fundamental geological processes, which include impact cratering, tectonism, and erosion.