Leveraging Industry Automation Techniques for Enhanced UAS System of Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Built for Everyone
Product Data Sheet: Ignition 8.1 Industrial Application Platform 01 Built For Everyone The all new Long-Term Support (LTS) release introduces powerful new features to the Ignition Platform to help you develop and use projects more effectively. “Ignition 8.1 is a milestone for Inductive Automation and for Ignition. It represents our full vision of what The New SCADA could be, and is the platform that all of our customers will want to leverage for their next generation solutions." – Steve Hechtman CEO & Founder, Inductive Automation 800.266.7798 www.inductiveautomation.com 9-9-2020 02 For the Plant Floor Ignition 8.1 adds amazing features to Ignition Perspective that help you see and control your plant-floor processes more effectively than ever before. A New Perspective for the Plant Floor With Perspective, you can create beautiful, mobile-responsive industrial applications that run natively on any mobile device and web browser. Now, with the new Perspective Workstation, you can instantly web-deploy native applications to any HMI, desktop, workstation, and multi-monitor configuration without the need for a third-party web browser. 800.266.7798 www.inductiveautomation.com 9-9-2020 03 Run in Full-Screen Kiosk Mode Eliminate any distractions from the underlying OS with Perspective Workstation’s Kiosk mode. Screens courtesy of Corso Systems Control the Plant Floor from Design for Multiple Screen Sizes at Your Phone the Same Time Put the full control of your plant floor in the palm Save development time by designing a single of your hand with the Perspective App for iOS & Perspective application that displays beautifully on Android. -

Intro to Ignition for Existing Users of Factorypmi and Factorysql
Intro to Ignition For Existing Users of FactoryPMI and FactorySQL In January 2010, Inductive Automation released Ignition by Inductive Automation, the successor to the popular FactoryPMI and FactorySQL line of industrial automation software products. This introduction will help existing users of FactoryPMI and/or FactorySQL understand the changes and decide when and how to transition to Ignition. What is Ignition? Ignition is a web-based industrial application server. It can be used to create indus- trial HMI, SCADA, and MES systems just like FactoryPMI and FactorySQL could. In fact, any system you could create with our classic software, you can create with Ignition. Its modular architecture lets it morph into many different configurations. What happened to FactoryPMI and FactorySQL? Don’t worry, we didn’t abandon our existing software! In fact, Ignition is an evolution of FactoryPMI and FactorySQL. Both of our classic products live on in Ignition, albeit with different names. FactoryPMI is now the Ignition Vision Module. FactorySQL is the Ignition SQL Bridge Module. The Reporting Plugin is now the Ignition Reporting Module. The modules are backwards-compatible, and existing users are eligible for upgrade pricing for the Ignition modules. Why the change? There were two primary factors that drove the development of Ignition: the matu- ration of OPC-UA, and the desire to create a more unified, user-friendly experience. OPC-UA Arrives We’ve all been hearing about it for years, but OPC-UA is finally here, and it does not disappoint. OPC-UA is cross platform, reliable, high performance, and doesn’t rely on DCOM. -
Innovation-Powered Manufacturing Disruptive Technologies, Cross-Pollination and Ignition
White Paper Innovation-Powered Manufacturing Disruptive Technologies, Cross-Pollination and Ignition To succeed in today’s data-driven world, don't simply compete in the game – change the game. 800.266.7798 800.266.7798www.inductiveautomation.com www.inductiveautomation.com Innovation-Powered Manufacturing Disruptive Technologies, Cross-Pollination & Ignition A full -grown elephant can weigh Whatever the reason may be, companies like these are not moving forward even though competitors 13,000 pounds and has been known who embrace the rapid changes in technology are to carry close to its own weight on leaving them farther and farther behind. They are unaware of, or unwilling to tap into, the innovative its back, yet these powerful animals power they possess. can be trained to stand still. Like a trained elephant stuck in the thinking of its Training starts when the elephant is young. Elephant infancy, they remain chained to a 20th century trainers use a technique of chaining a young mentality in the 21st century. Companies that remain elephant’s foot to a heavy stake that is driven into resistant to change will never reach their full poten- the ground. When the little elephant tries to walk tial and will find it harder and harder to adapt to an too far or escape the chain, its foot is yanked back. industry that is rapidly changing under their feet. The elephant learns a painful, lasting lesson: if the chain is on its foot and it tries to move outside of a limited area, it will feel pain. As the elephant grows bigger and stronger, the secret to keeping it from breaking its bonds isn’t to use a heavier chain but to simply take the stake out of the ground. -

Recipe/Changeover Module MES BUILT on IGNITION®
SEPASOFT, INC. | RECIPE PRODUCT DATA SHEET Recipe/Changeover Module MES BUILT ON IGNITION® Expertly build, manage, and monitor recipes with the MES Features Master Recipe Functionality Recipe/Changeover Module. The Recipe/Changeover Recipe Editor Module is ideal for quickly and accurately changing Variance Log machine, process, or system recipes. Powerful master recipe Role-Based Security and sub-recipe management, recipe security, change log Recipe Change Log Analysis and Reports tracking, variance tracking, and more empower you to OEE and SPC Integration improve efficiency and quality, and take more control of your manufacturing facility. Supported Operating Systems Master Recipe Functionality Windows Server 2008/2012/2016 Windows 7, 8, 10, or later Reduce the effort required to manage numerous recipes with master Ubuntu Linux 12.04 or later recipe functionality. When you change a setting in the master recipe, it 3 will replicate down to all of its sub-recipes while maintaining the specific Other Java SE enabled OSes2 values of each sub-recipe. With unlimited levels of master recipes, you can organize recipes in a hierarchical manner. Requirements Ignition® Core Modules Recipe Editor Java SE 8+ (server) Managing recipes has never been easier using the built-in visual recipe Java SE 6, 7, 8, or 9 (client) editor. Creating new recipes, reading current values into a recipe, recipe Quad-core processor (32- or 64-bit) exporting and importing, managing security, selecting machines for 8GB RAM recipes, and other editing capabilities are now just a mouse-click away. 10GB free HD space (requirements vary by usage) Supported Databases Microsoft® SQL Server MySQL Oracle Postgres *Ignition® is compatible with any Java-enabled operating system. -

Using Reportbuilder™ with Inductive Automation's Ignition SCADA System
Application Note 0008 Using ReportBuilder™ with Inductive Automation’s Ignition SCADA system. Introduction ReportBuilder™ can access Inductive Automation Ignition historically logged data to an MySQL Server via the ReportBuilder™ Ignition MySQL FunctionPack. This document describes the steps for configuring this FunctionPack and assumes you have a functioning MySQL Server already installed and that Ignition has been configured to log data to it. Overview The Ignition MySQL FunctionPack provides the interface for ReportBuilder™ to access data logged to an Ignition MySQL database by one or more Ignition systems. By default, Ignition logs to multiple tables, one for each month. This design makes data retrieval faster and easier to manage, but presents challenges to consumers of the data. In addition, the tables are optimized to store tag name information in a separate table and the timestamps are stored as an integer. The Ignition MySQL FunctionPack handles the complicated sql statements and conversions necessary for reporting data from these tables. Prerequisites/Requirements 1. MySQL ODBC 5.3 ANSI Driver or later (version might be different for your system) Referred by the MySQL Installer as Connector/ODBC x86 Architecture. You must download and install this ODBC driver on the workstation that you will use to report data from. The following product information applies to the version tested: a. Product Home: http://dev.mysql.com/downloads/connector/odbc/ b. Release Changes: http://dev.mysql.com/doc/relnotes/connector-odbc/en/news-5-3- 6.html c. Typical Install Path: C:\Program Files (x86)\MySQL\Connector ODBC 5.3\ 2. MySQL Time zone description tables must be loaded with the applicable time zone data. -

Inductive Automation Benchmarks 2008
Inductive Automation Benchmarks 2008 This whitepaper covers the details of running our products, FactoryPMI™ and FactorySQL™, through the paces of rigorous benchmark tests. These tests were designed to push the outer limits of what our software, especially our SQLTags™ system, is capable of, and to discover what those limits are. The information that follows should help answer most of the performance related questions that we commonly encounter from customers evaluating our software. In the spirit of openness that we strive for, we’ve made the results of these benchmark tests free and available for all. This paper is broken into two parts. Part one tests FactoryPMI under high concurrent client load, especially with heavy SQLTags usage. Part two (starting on page 6) tests FactorySQL SQLTags throughput against different database systems. FactoryPMI Benchmark Tests: Client Load Test using SQLTags Goal The goal of this benchmark test was to see how the FactoryPMI Gateway responded to increasing concurrent client load, especially under heavy SQLTags usage. Given FactoryPMI’s web-launched client architecture and generous licensing, concurrent client counts can be expected to be quite high for many installations. This benchmark aims to answer the question: “How many clients can I realistically expect to run at a time?” Methodology In the absence of licensing limitations, the answer to the question posed above depends on the computing resources available, as well as the load that each client puts on the Gateway. For these reasons, we actually ran three separate load tests to determine how many concurrent clients a Gateway could support under various conditions. -

Ignition SCADA for Water/Wasterwater
Ignition SCADA for Water/Wastewater An Introduction to Inductive Automation’s Ignition software Presented By: Matt Furman & Todd Morrison of Results Engineering, Inc. Date: 2/6/2018 Results Engineering, Inc. Located in Saco and Bangor, Maine In business since 1988 Serving customers in: Water/Wastewater Manufacturing Pulp & Paper Burner Management Systems Material Handling Non-wovens Services offered include: Electrical and controls engineering Controls integration Information technology for manufacturing Key Points Ignition is a powerful, flexible, and affordable solution for plants, business, and industry Results Engineering, Inc. is a certified Ignition integrator with many successful installations in Maine What is SCADA? SCADA system: Supervisory Control and Data Acquistion The interface that an operator uses to see and control equipment and processes The software and computer hardware that monitors, gathers, and processes real-time data Interact directly with devices such as instruments, pumps, or valves through Human-Machine Interface (HMI) software What is Ignition? Similar in some ways to other SCADA systems Lookout by National Instruments VTScada by Trihedral FactoryTalk View by Rockwell iFIX by GE Most other SCADA systems were developed 20+ years ago when technology was very different. Security, remote access, ease of access, and other topics weren’t as important. Why is it Better? “The New SCADA” Ignition is an industrial automation software platform that many businesses and organizations have switched to for their HMI/SCADA needs. Installed in over ten thousand locations in over 80 countries Industry-leading tech support and training – free support for integrators Integrator Certification Program Its licensing model lets users pay a flat fee based on number of servers instead of by the client or tag. -

Programmable Logic Controllers and Data Traffic Handling Solutions
Paper ID #21608 Programmable Logic Controllers and Data Traffic Handling Solutions Dr. David Border, Bowling Green State University David A. Border, Ph.D., holds a principle research interest in electronic information systems. This field includes digital communication and networking and intelligent networked devices. His work includes wireless sensor networks. Prior research included work on signal bandwidth compression and signal specific data encoding techniques. His technology application interest includes networked systems. Typ- ical teaching duties include junior- and senior-level courses in the Electronics and Computer Engineering Technology (ECET) program. Within this course set are the curriculum’s networking and communication courses. As is true with his ECET faculty colleagues, Border supports the program with teaching assign- ments, as needed, in freshman- and sophomore-level courses offerings. Examples of these include the sophomore level electric circuits and digital electronics courses. Border teaches a digital communication graduate course within a Ph.D. Consortium Technology Management program, as well as other graduate level courses at BGSU. Border served as interim department chair of the Engineering Technologies department. He served as chair of the university Faculty Senate curriculum and academic affairs committee. He is chair of the University Faculty Senate. c American Society for Engineering Education, 2018 Programmable Logic Controllers and Data Traffic Handling Solutions Abstract Today’s manufacturing industry depends on Programmable Logic Controllers (PLCs). Throughout the industry, engineers are using PLCs to collect and keep track of vast quantities of data. There are many different ways that industry uses to accomplish the task of retrieving and reporting useful data from PLCs. End-to-end transfers use large application tools, others use open software, and yet others use proprietary solutions. -

Seeq---Inductive-Automation-04-17
+ Accelerate Process Manufacturing Analytics Seeq® enables Inductive Automation customers to get more value out of data in the Ignition SCADA system. Seeq We are very happy to have Seeq’s support users experience faster time to insight, achieving insights in for the Ignition platform, which we describe minutes that replace hours of manual work in spreadsheets “ as The New SCADA because it redefines copying, cleansing, and manipulating process data. Key features include easy-to-use trending and data visualization SCADA technology and licensing. tools, Google-like search, data cleansing, and the ability to Many attendees at our annual Ignition quickly compare results from different batches. Community Conference were very pleased Seeq is a productivity application for engineers with the flexibility and productivity offered and teams. by Seeq. Seeq is easy to learn and easy to use. It dramatically – Don Pearson, Chief Strategy Officer increases the productivity of engineers for investigation ” for Inductive Automation and analytics on manufacturing operations and asset data. Engineers can rapidly aggregate, cleanse, and manipulate data from Ignition, and other sources, to uncover production insights, create reports, and publish dashboards. of record. In addition, Seeq works with data sources that Seeq enables visual analytics on Ignition data. provide context to your process data, like batch records in SQL Server, MySQL, and Oracle, plus OPC servers Seeq leverages recent software innovations to simplify and and even CSV data through drag and drop integration. accelerate working with your data. Pattern Search, Value Seeq: Innovation at every step. Search, Annotations, Conditions and Scatterplot charts are just some of the features specifically designed for time Seeq Workbench runs in any modern browser, like the series data analytics, plus support for reporting features in Ignition SCADA platform. -

Amazon Web Services Injector Module by Cirrus Link Solutions
Amazon Web Services Injector Module By Cirrus Link Solutions The AWS Injector module easily connects any tag data from the Inductive Features Automation Ignition platform into the Amazon Web Services (AWS) cloud Connects to any Tag Data infrastructure. With a simple configuration, tag data will flow into AWS Kinesis data Easy to Configure streams or DynamoDB using an easy to read and efficient JSON representation. Efficient reporting scheme Use in Ignition Gateway or EDGE With the operational data from Ignition in AWS cloud you can unleash the power of Does not require MQTT infrastructure the AWS Platform for big data applications, predictive maintenance, predictive Powered by Ignition analytics, AI, and vastly improve operations and ultimately insight into your business processes. Supported Operating Systems Windows Server 2008/2012 Windows 7, 8, and 10 Ubuntu Linux 12.04 or later Other Java SE-enabled OSes1 Supported Databases Microsoft® SQL Server MySQL Oracle PostgreSQL Requirements Java SE 8 (server) Java SE 6, 7, or 8 (client) 1024 MB RAM3 1 GB free HD space (Requirements vary by usage) 1. Ignition is compatible with any Java SE 8-enabled OS. Full support is only offered for listed OSes. Operational data seamlessly pushed to the cloud The AWS Injector module is available for both Ignition Gateway and Ignition Edge, allowing data to flow directly to the cloud from any point in the network. Extremely simply to configure 844.824.7787 www.cirrus-link.com Amazon Web Services Injector Module By Cirrus Link Solutions Once the data is inside Amazon cloud, there is a large selection of tools and business partners available specifically designed for big data analytics. -
Cirrus Link MQTT Modules for Ignition by Inductive Automation
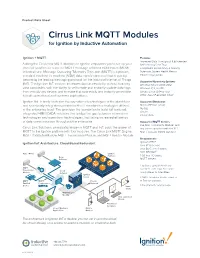
Product Data Sheet Cirrus Link MQTT Modules for Ignition by Inductive Automation Ignition + MQTT Features Increased Data Throughput & Efficiencies Adding the Cirrus Link MQTT Modules to Ignition empowers you to set up your Self-Learning Data Tags own IIoT solution on a secure MQTT message-oriented middleware (MOM) Exceptional Redundancy & Security infrastructure. Message Queueing Telemetry Transport (MQTT) is a proven, Automatic System Health Metrics standard machine-to-machine (M2M) data transfer protocol that is quickly Powered by Ignition becoming the leading messaging protocol for the Industrial Internet of Things Supported Operating Systems (IIoT). This Ignition IIoT solution increases data accessibility without straining Windows Server 2008/2012 data bandwidth, with the ability to self-create and instantly update data tags Windows 7, 8, and 10 from virtually any device, and to make that data easily and instantly accessible Ubuntu Linux 12.04 or later to both operational and business applications. Other Java SE-enabled OSes1 Ignition IIoT is firmly rooted in the operational technologies of the plant floor Supported Databases and seamlessly integrates upwards to the IT-standard technologies utilized Microsoft® SQL Server at the enterprise level. This provides the foundation to build full-featured, MySQL Oracle integrated HMI/SCADA solutions that bridge the gap between information PostgreSQL technologies and operations technologies, facilitating increased efficiency of data communication throughout the enterprise. Supported MQTT Servers The MQTT Distributor Module2 and Cirrus Link Solutions, an industry leader in MQTT and IIoT, adds the power of any server compliant with the 3.1.1 MQTT to the Ignition platform with four modules: The Cirrus Link MQTT Engine, MQTT protocol OASIS standard MQTT Distributor Module, MQTT Transmission Module, and MQTT Injector Module. -

Ignition and Java Security: Why and How Ignition Uses Java to Create Secure, Cross-Platform Systems
White Paper Ignition and Java Security: Why and How Ignition Uses Java to Create Secure, Cross-Platform Systems 800.266.7798 www.inductiveautomation.com Ignition and Java Security: Why and How Ignition Uses Java to Create Secure, Cross-Platform Systems Ignition by Inductive Automation is Our first and foremost reason for using Java is that it’s based on the concept of “write once, run the first SCADA software solution anywhere.” Its portability enables Ignition to be a built entirely on Java. Ignition’s use cross-platform solution which users can run on any of Java makes it totally cross- operating system.⁵ Also, Java is network-centric, which gives platform compatible and easily web- Ignition its web-deployed capability. Developers deployable, two major reasons for can work with resources across a network and create network-based applications using client/ the software’s growing community server architecture. of global Ignition users. Another reason is that Java is well-supported. The Java community is over 10 million developers Java is a well-established programming language strong and continues to grow, so there is a gigantic that has been used and trusted around the world talent pool of skilled Java developers. Java has for more than 20 years. Java was released in 1995 an extraordinarily rich set of libraries, so there are and quickly became one of the top programming a phenomenal number of resources available for languages in the world. Since 2001, it has held developing with Java. the number-one or number-two spot on the TIOBE Index.¹ These are all factors that let us remain nimble and make Ignition the product that our customers According to Oracle, which has owned and demand.