7.05 Numerical Methods for Mantle Convection S
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Archimedean Proof of the Physical Impossibility of Earth Mantle Convection by J. Marvin Herndon Transdyne Corporation San Diego
Archimedean Proof of the Physical Impossibility of Earth Mantle Convection by J. Marvin Herndon Transdyne Corporation San Diego, CA 92131 USA [email protected] Abstract: Eight decades ago, Arthur Holmes introduced the idea of mantle convection as a mechanism for continental drift. Five decades ago, continental drift was modified to become plate tectonics theory, which included mantle convection as an absolutely critical component. Using the submarine design and operation concept of “neutral buoyancy”, which follows from Archimedes’ discoveries, the concept of mantle convection is proven to be incorrect, concomitantly refuting plate tectonics, refuting all mantle convection models, and refuting all models that depend upon mantle convection. 1 Introduction Discovering the true nature of continental displacement, its underlying mechanism, and its energy source are among the most fundamental geo-science challenges. The seeming continuity of geological structures and fossil life-forms on either side of the Atlantic Ocean and the apparent “fit’ of their opposing coastlines led Antonio Snider-Pellegrini to propose in 1858, as shown in Fig. 1, that the Americas were at one time connected to Europe and Africa and subsequently separated, opening the Atlantic Ocean (Snider-Pellegrini, 1858). Fig. 1 The opening of the Atlantic Ocean, reproduced from (Snider-Pellegrini, 1858). 1 Half a century later, Alfred Wegener promulgated a similar concept, with more detailed justification, that became known as “continental drift” (Wegener, 1912). Another half century later, continental drift theory was modified to become plate tectonics theory (Dietz, 1961;Hess, 1962;Le Pichon, 1968;Vine and Matthews, 1963). Any theory of continental displacement requires a physically realistic mechanism and an adequate energy source. -

(2 Points Each) 1. the Velocity Of
GG 101, Spring 2006 Name_________________________ Exam 2, March 9, 2006 A. Fill in the blank (2 points each) 1. The velocity of an S-wave is ______lower_________ than the velocity of a P-wave. 2. What type of seismic wave is being recorded by the above diagram? A __P__ wave. 3. The most voluminous layer of Earth is the ___mantle_________. 4. The rigid layer of Earth which consists of the crust and uppermost mantle is called the __ lithosphere__________. 5. Which of the major subdivisions of Earth's interior is thought to be liquid? ____outer core________. 6. When the giant ice sheets in the northern hemisphere melted after the last ice age, the Earth's crust ____rebounded____ because a large weight was removed. Name _______________________________ GG 101 Exam 2 Page 2 7. The process described in question 6 is an example of ___isostasy____. 8. Earth's dense core is thought to consist predominantly of ____iron________. 9. The island of Hawaii experiences volcanism because it is located above a(n) ___hot spot_________. 10. The Himalaya Mountains were caused by ___collision__ between ___India__________ and Asia. 11. ___Folds____ are the most common ductile response to stress on rocks in the earth’s crust. 12. ___Faults___ are the most common brittle response to stress on rocks in the earth’s crust. 13. What types of faults are depicted in the cross section shown above? ___thrust_______ faults. Name _______________________________ GG 101 Exam 2 Page 3 14. The structure shown in the above diagram is a(n) ____anticline_____. 15. The name of a fold that occurs in an area of intense deformation where one limb of the fold has been tilted beyond the vertical is called a(n) ____overturned____ fold. -

The Relation Between Mantle Dynamics and Plate Tectonics
The History and Dynamics of Global Plate Motions, GEOPHYSICAL MONOGRAPH 121, M. Richards, R. Gordon and R. van der Hilst, eds., American Geophysical Union, pp5–46, 2000 The Relation Between Mantle Dynamics and Plate Tectonics: A Primer David Bercovici , Yanick Ricard Laboratoire des Sciences de la Terre, Ecole Normale Superieure´ de Lyon, France Mark A. Richards Department of Geology and Geophysics, University of California, Berkeley Abstract. We present an overview of the relation between mantle dynam- ics and plate tectonics, adopting the perspective that the plates are the surface manifestation, i.e., the top thermal boundary layer, of mantle convection. We review how simple convection pertains to plate formation, regarding the aspect ratio of convection cells; the forces that drive convection; and how internal heating and temperature-dependent viscosity affect convection. We examine how well basic convection explains plate tectonics, arguing that basic plate forces, slab pull and ridge push, are convective forces; that sea-floor struc- ture is characteristic of thermal boundary layers; that slab-like downwellings are common in simple convective flow; and that slab and plume fluxes agree with models of internally heated convection. Temperature-dependent vis- cosity, or an internal resistive boundary (e.g., a viscosity jump and/or phase transition at 660km depth) can also lead to large, plate sized convection cells. Finally, we survey the aspects of plate tectonics that are poorly explained by simple convection theory, and the progress being made in accounting for them. We examine non-convective plate forces; dynamic topography; the deviations of seafloor structure from that of a thermal boundary layer; and abrupt plate- motion changes. -
Geothermal Gradient - Wikipedia 1 of 5
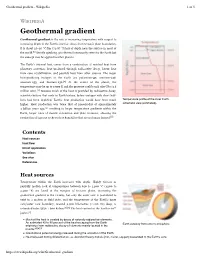
Geothermal gradient - Wikipedia 1 of 5 Geothermal gradient Geothermal gradient is the rate of increasing temperature with respect to increasing depth in the Earth's interior. Away from tectonic plate boundaries, it is about 25–30 °C/km (72-87 °F/mi) of depth near the surface in most of the world.[1] Strictly speaking, geo-thermal necessarily refers to the Earth but the concept may be applied to other planets. The Earth's internal heat comes from a combination of residual heat from planetary accretion, heat produced through radioactive decay, latent heat from core crystallization, and possibly heat from other sources. The major heat-producing isotopes in the Earth are potassium-40, uranium-238, uranium-235, and thorium-232.[2] At the center of the planet, the temperature may be up to 7,000 K and the pressure could reach 360 GPa (3.6 million atm).[3] Because much of the heat is provided by radioactive decay, scientists believe that early in Earth history, before isotopes with short half- lives had been depleted, Earth's heat production would have been much Temperature profile of the inner Earth, higher. Heat production was twice that of present-day at approximately schematic view (estimated). 3 billion years ago,[4] resulting in larger temperature gradients within the Earth, larger rates of mantle convection and plate tectonics, allowing the production of igneous rocks such as komatiites that are no longer formed.[5] Contents Heat sources Heat flow Direct application Variations See also References Heat sources Temperature within the Earth -

Mantle Convection in Terrestrial Planets
MANTLE CONVECTION IN TERRESTRIAL PLANETS Elvira Mulyukova & David Bercovici Department of Geology & Geophysics Yale University New Haven, Connecticut 06520-8109, USA E-mail: [email protected] May 15, 2019 Summary surfaces do not participate in convective circu- lation, they deform in response to the underly- All the rocky planets in our Solar System, in- ing mantle currents, forming geological features cluding the Earth, initially formed much hot- such as coronae, volcanic lava flows and wrin- ter than their surroundings and have since been kle ridges. Moreover, the exchange of mate- cooling to space for billions of years. The result- rial between the interior and surface, for exam- ing heat released from planetary interiors pow- ple through melting and volcanism, is a conse- ers convective flow in the mantle. The man- quence of mantle circulation, and continuously tle is often the most voluminous and/or stiffest modifies the composition of the mantle and the part of a planet, and therefore acts as the bottle- overlying crust. Mantle convection governs the neck for heat transport, thus dictating the rate at geological activity and the thermal and chemical which a planet cools. Mantle flow drives geo- evolution of terrestrial planets, and understand- logical activity that modifies planetary surfaces ing the physical processes of convection helps through processes such as volcanism, orogene- us reconstruct histories of planets over billions sis, and rifting. On Earth, the major convective of years after their formation. currents in the mantle are identified as hot up- wellings like mantle plumes, cold sinking slabs and the motion of tectonic plates at the surface. -
Geodynamic Modelling Using Ellipsis
GEOS3104-3804: GEOPHYSICAL METHODS Geodynamic modelling using Ellipsis Patrice F. Rey GEOS-3104 Computational Geodynamics Computational tectonics/geodynamics provides a robust plat- form for hypotheses testing and exploring coupled tectonic and geodynamic processes. It delivers the unexpected by re- vealing previously unknown behaviors. 1 SECTION 1 The rise of computer science During the mid-19th century, the laws of thermody- tle convection, and plate tectonic processes which also namics - which describe the relation between heat and involves the flow - brittle or ductile - of rocks. 21st cen- forces between contiguous bodies - and fluid dynam- tury computers have now the capability to compute in ics - which describes the flow of fluids in relation to four dimensions the flow of complex fluid with com- pressure gradients - reached maturity. Both theories plex rheologies and contrasting physical properties we underpin our understanding of many natural proc- typically encounter on Earth. For geosciences, this is a esses from atmospheric and oceanic circulation, man- significant shift. 2 Computational tectonics and geodynamics: There is a revolution Navier-Stokes equations: Written in Georges G. Stokes (1819-1903) unfolding at the moment in all corners of science, engineering, and the 1850’s, the Navier-Stokes equations other disciplines like economy and social sciences. This revolution are the set of differential equations that is driven by the growing availability of increasingly powerful describe the motion of fluid and associ- high-performance computers (HPC), and the growing availability ated heat exchanges. They relate veloc- of free global datasets and open source data processing tools (Py- ity gradients to pressure gradients and thon, R, Paraview, QGIS-GRASS, etc). -

Earth's Moving Mantle Demonstration* (Teacher Master) Materials
Earth’s Moving Mantle Demonstration* (Teacher Master) Objectives: Experiment with thermal convection. Illustrate how thermal energy (heat) can generate motion (flow) in a fluid. The thermal convection in this model is similar to the convection that is inferred for Earth’s mantle. Convection can produce horizontal flow that can cause (or is related to) plate motions. Investigate the viscosity of a fluid and illustrate that Earth’s mantle can be thought of as a solid for short-duration processes (such as the propagation of seismic waves) and as a very viscous fluid for long-duration processes (such as mantle convection and plate tectonic movements). Materials 1 glass bread loaf dish (1.5 liter)* 2 ceramic coffee cups 1 small Sterno can or 2 small candles Vegetable oil (about 800–1,000 ml, or 28–34 fl oz) 10 ml (approx. 2 teaspoons) thyme 1 metal spoon 1 box of matches 3 pieces of thin (about 2 mm, or 1/16 in, thick) balsa wood, each 3 × 2 in *A 2 liter, 20 × 20 cm, or 8 × 8 inch glass dish can be substituted; 2 small Sterno cans or 3 small candles can be used for the extra width of the container. Thermal convection experiments: Mix the vegetable oil and the thyme (spice) in the glass dish. Stir thoroughly to distribute the flakes of thyme. Arrange glass dish and other materials as shown in figure 1 [appendix]. (Because of the viscosity of the oil and the density of the flakes of thyme, the pieces of thyme are approximately neutrally buoyant. If left unstirred for a long period of time, the thyme will not be evenly distributed in the volume of oil—some of the thyme will tend to float, and some will tend to sink. -

On Some Global Problems of Geophysical Fluid Dynamics (A Review)T (Gravitational Differentiation/Rotational Pole/Mantle Convection) A
Proc. Nati. Acad. Sci. USA Vol. 75, No. 1, pp. 34-39, January 1978 Geophysics On some global problems of geophysical fluid dynamics (A Review)t (gravitational differentiation/rotational pole/mantle convection) A. S. MONIN P. P. Shirshov Institute of Oceanology, Academy of Sciences of the Union of Soviet Socialist Republics, Moscow, Union of Soviet Socialist Republics Contributed by A. S. Monin, September 28,1977 The development of the earth sciences during recent years has of the moon, the sun, and other planets are not taken into con- been associated with a wide use of geophysical fluid dynamics sideration. These simplifications do not distort too much the (i.e., the dynamics of natural flows of rotating baroclinic class of motions inside the earth that we are interested in; if stratified fluids), a discipline whose scope includes turbulence necessary, the simplifications can be removed by the intro- and vertical microstructure in stably stratified fluids, gravity duction of appropriate corrections. Equations of motion are waves at the interface, internal gravity waves and convection, written for each of the layers, with the right-hand parts con- tides and other long-period waves, gyroscopic waves, the hy- taining volume forces associated with the presence of the drodynamic theory of weather forecasting, circulations of the gravity and magnetic fields and stresses of the viscous and planetary atmospheres and oceans, the dynamo theory of the magnetic origin. A magnetohydrodynamic equation of the generation of planetary and stellar magnetic fields, etc. magnetic field evolution (induction equation) should be added to the equations of motion. The energetics of the processes in the layers under consideration can be represented by mutual POTENTIAL VORTICITY transformations of kinetic, magnetic, and internal energies. -

9.08 Thermal Evolution of the Mantle G
9.08 Thermal Evolution of the Mantle G. F. Davies, Australian National University, Canberra, ACT, Australia ª 2007 Elsevier B.V. All rights reserved. 9.08.1 Introduction 197 9.08.1.1 Cooling and the Age of Earth 197 9.08.1.2 A Static Conductive Mantle? 198 9.08.2 The Convecting Mantle 198 9.08.2.1 A Reference Thermal History 200 9.08.3 Internal Radioactivity and the Present Cooling Rate 202 9.08.4 Variations on Standard Cooling Models 203 9.08.4.1 Effect of Volatiles on Mantle Rheology 203 9.08.4.2 Two-Layer Mantle Convection 204 9.08.4.3 Static Lithosphere Convection, and Venus 205 9.08.5 Coupled Core–Mantle Evolution and the Geodynamo 206 9.08.6 Alternative Models of Thermal History 208 9.08.6.1 Episodic Histories 208 9.08.6.2 Strong Compositional Lithosphere 209 9.08.7 Implications for Tectonic Evolution 210 9.08.7.1 Viability of Plate Tectonics 211 9.08.7.2 Alternatives to Plate Tectonics 212 9.08.7.3 History of Plumes 212 9.08.8 Conclusion 214 References 214 9.08.1 Introduction age emerged. This was done by William Thomson, better known as Lord Kelvin, who played a key role The thermal evolution of Earth’s interior has fea- in the development of thermodynamics, notably as tured fundamentally in the geological sciences, and the formulator of the ‘second law’. it continues to do so. This is because Earth’s internal Kelvin actually calculated an age for the Sun first, heat fuels the driving mechanism of tectonics, and using estimates of the gravitational energy released by hence of all geological processes except those driven the Sun’s accretion from a nebular cloud, the heat at the surface by the heat of the Sun. -

Introduction to Mantle Convection Richard F Katz – University of Oxford – March 23, 2012
Introduction to mantle convection Richard F Katz { University of Oxford { March 23, 2012 (Based on Mantle Convection for Geologists by Geoffrey Davies, from Cambridge University Press. Figures from this text unless otherwise noted.) With that basic introduction to thermal convection, we are ready to consider the mantle and how it convects. The mantle has two modes of convection, the plate mode and the plume mode. The plate mode is plate tectonics: a cold, stiff thermal boundary layer on the outside of the planet founders and sinks into the mantle at subduction zones, pulling the surface plate along behind it. Upwellings are passive (that is they are driven by plate spreading, not by buoyancy). The plate mode arises from the strong cooling at the surface, and the weak internal heating of the mantle. It is responsible for the majority of the heat transfer out of the Earth. The plume mode is associated with narrow, thermal upwellings in the mantle that may be rooted at the core-mantle boundary. It arises because the mantle is heated from below by the core. The plume mode accounts for only a small fraction of the heat transfer out of the Earth. Mantle convection in both the plate and plume modes leads to cooling of the Earth over time. Simple, globally integrated energy balances can allow us to formu- late and test hypotheses about the thermal history of the Earth. 1 The fluid mantle We know the mantle is solid: seismic shear waves pass through it efficiently, travers- ing the interior of the Earth multiple times. -

Dynamics of the Upper Mantle in Light of Seismic Anisotropy
10 Dynamics of the Upper Mantle in Light of Seismic Anisotropy Thorsten W. Becker1,2 and Sergei Lebedev3 ABSTRACT Seismic anisotropy records continental dynamics in the crust and convective deformation in the mantle. Deci- phering this archive holds huge promise for our understanding of the thermo-chemical evolution of our planet, but doing so is complicated by incomplete imaging and non-unique interpretations. Here, we focus on the upper mantle and review seismological and laboratory constraints as well as geodynamic models of anisotropy within a dynamic framework. Mantle circulation models are able to explain the character and pattern of azimuthal ani- sotropy within and below oceanic plates at the largest scales. Using inferences based on such models provides key constraints on convection, including plate-mantle force transmission, the viscosity of the asthenosphere, and the net rotation of the lithosphere. Regionally, anisotropy can help further resolve smaller-scale convection, e.g., due to slabs and plumes in active tectonic settings. However, the story is more complex, particularly for continental lithosphere, and many systematic relationships remain to be established more firmly. More integrated approaches based on new laboratory experiments, consideration of a wide range of geological and geophysical constraints, as well as hypothesis-driven seismological inversions are required to advance to the next level. 10.1. INTRODUCTION unless noted otherwise. Anisotropy is a common property of mineral assemblages and appears throughout the Anisotropy of upper mantle rocks records the history of Earth, including in its upper mantle. There, anisotropy mantle convection and can be inferred remotely from seis- can arise due to the shear of rocks in mantle flow. -

The Role of Pressure in Mantle Convection
Simple scaling relations in geodynamics; the role of pressure in mantle convection Don L. Anderson Seismological Laboratory 252-21, California Institute of Technology, Pasadena, CA 91125, USA Phone: (626) 564 0715 Fax: (626) 395 6901 Email: [email protected] unpublished manuscript September, 2003 Introduction Pressure decreases interatomic distances in solids and this has a strong non-linear effect on such properties as thermal expansion, conductivity, and viscosity, all in the direction of making it difficult for small-scale thermal instabilities to form in deep planetary interiors. Convection is sluggish and large scale at high pressure. The Boussinesq approximation assumes that density, or volume (V), is a function of temperature (T) but that all other properties are independent of T, V and pressure (P), even those that are functions of V. This approximation, although thermodynamically (and algebraically) inconsistent, appears to be valid at low pressures, is widely used to analyze laboratory convection and is also widely used in geodynamics, including whole mantle convection simulations. Sometimes this approximation is supplemented with a depth dependent viscosity or with T dependence of parameters other than density. It is preferable to use a thermodynamically self-consistent approach. To first order, the properties of solids depend on interatomic distances, or lattice volumetric strain, and to second order on what causes the strain (T, P, composition, crystal structure). This is the basis of Birch’s Law [1], the seismic equation