Pspice Reference Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Desarrollo Del Juego Sky Fighter Mediante XNA 3.1 Para PC
Departamento de Informática PROYECTO FIN DE CARRERA Desarrollo del juego Sky Fighter mediante XNA 3.1 para PC Autor: Íñigo Goicolea Martínez Tutor: Juan Peralta Donate Leganés, abril de 2011 Proyecto Fin de Carrera Alumno: Íñigo Goicolea Martínez Sky Fighter Tutor: Juan Peralta Donate Agradecimientos Este proyecto es la culminación de muchos meses de trabajo, y de una carrera a la que llevo dedicando más de cinco años. En estas líneas me gustaría recordar y agradecer a todas las personas que me han permitido llegar hasta aquí. En primer lugar a mis padres, Antonio y Lola, por el apoyo que me han dado siempre. Por creer en mí y confiar en que siempre voy a ser capaz de salir adelante y no dudar jamás de su hijo. Y lo mismo puedo decir de mis dos hermanos, Antonio y Manuel. A Juan Peralta, mi tutor, por darme la oportunidad de realizar este proyecto que me ha permitido acercarme más al mundo de los videojuegos, algo en lo que querría trabajar. Pese a que él también estaba ocupado con su tesis doctoral, siempre ha sacado tiempo para resolver dudas y aportar sugerencias. A Sergio, Antonio, Toño, Alberto, Dani, Jorge, Álvaro, Fernando, Marta, Carlos, otro Antonio y Javier. Todos los compañeros, y amigos, que he hecho y que he tenido a lo largo de la carrera y gracias a los cuales he podido llegar hasta aquí. Por último, y no menos importante, a los demás familiares y amigos con los que paso mucho tiempo de mi vida, porque siempre están ahí cuando hacen falta. -

A Data-Driven Approach for Personalized Drama Management
A DATA-DRIVEN APPROACH FOR PERSONALIZED DRAMA MANAGEMENT A Thesis Presented to The Academic Faculty by Hong Yu In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the School of Computer Science Georgia Institute of Technology August 2015 Copyright © 2015 by Hong Yu A DATA-DRIVEN APPROACH FOR PERSONALIZED DRAMA MANAGEMENT Approved by: Dr. Mark O. Riedl, Advisor Dr. David Roberts School of Interactive Computing Department of Computer Science Georgia Institute of Technology North Carolina State University Dr. Charles Isbell Dr. Andrea Thomaz School of Interactive Computing School of Interactive Computing Georgia Institute of Technology Georgia Institute of Technology Dr. Brian Magerko Date Approved: April 23, 2015 School of Literature, Media, and Communication Georgia Institute of Technology To my family iii ACKNOWLEDGEMENTS First and foremost, I would like to express my most sincere gratitude and appreciation to Mark Riedl, who has been my advisor and mentor throughout the development of my study and research at Georgia Tech. He has been supportive ever since the days I took his Advanced Game AI class and entered the Entertainment Intelligence lab. Thanks to him I had the opportunity to work on the interactive narrative project which turned into my thesis topic. Without his consistent guidance, encouragement and support, this dissertation would never have been successfully completed. I would also like to gratefully thank my dissertation committee, Charles Isbell, Brian Magerko, David Roberts and Andrea Thomaz for their time, effort and the opportunities to work with them. Their expertise, insightful comments and experience in multiple research fields have been really beneficial to my thesis research. -

Design and Performance Evaluation of a Software Framework for Multi-Physics Simulations on Heterogeneous Supercomputers
Design and Performance Evaluation of a Software Framework for Multi-Physics Simulations on Heterogeneous Supercomputers Entwurf und Performance-Evaluierung eines Software-Frameworks für Multi-Physik-Simulationen auf heterogenen Supercomputern Der Technischen Fakultät der Universität Erlangen-Nürnberg zur Erlangung des Grades Doktor-Ingenieur vorgelegt von Dipl.-Inf. Christian Feichtinger Erlangen, 2012 Als Dissertation genehmigt von der Technischen Fakultät der Universität Erlangen-Nürnberg Tag der Einreichung: 11. Juni 2012 Tag der Promotion: 24. July 2012 Dekan: Prof. Dr. Marion Merklein Berichterstatter: Prof. Dr. Ulrich Rüde Prof. Dr. Takayuki Aoki Prof. Dr. Gerhard Wellein Abstract Despite the experience of several decades the numerical simulation of computa- tional fluid dynamics is still an enormously challenging and active research field. Most simulation tasks of scientific and industrial relevance require the model- ing of multiple physical effects, complex numerical algorithms, and have to be executed on supercomputers due to their high computational demands. Fac- ing these complexities, the reimplementation of the entire functionality for each simulation task, forced by inflexible, non-maintainable, and non-extendable im- plementations is not feasible and bound to fail. The requirements to solve the involved research objectives can only be met in an interdisciplinary effort and by a clean and structured software development process leading to usable, main- tainable, and efficient software designs on all levels of the resulting software framework. The major scientific contribution of this thesis is the thorough design and imple- mentation of the software framework WaLBerla that is suitable for the simulation of multi-physics simulation tasks centered around the lattice Boltzmann method. The design goal of WaLBerla is to be usable, maintainable, and extendable as well as to enable efficient and scalable implementations on massively parallel super- computers. -

Reference Designators for Electronic Components
Reference Designators For Electronic Components Peerless Rex never demythologizes so insularly or vialled any obstetricians formally. Jef often triangulates ethereally when covetous Ferdy ensphere songfully and intertwist her hydrometers. Tetrapterous Jule brines piously while Filipe always estopping his mudslide rack tantalizingly, he incorporate so autodidactically. The article for actual pcb layout or temperature and devices are working with essentially coils of reference designators for electronic components of both sides of the first sheet That a reference designator is assigned for all electronic and mechanical components in order on track the information with the schematic diagrams identified for. You should also plot in your materials document a description of the package or case text each intended mount component should require in. This category only includes cookies that ensures basic functionalities and security features of the website. If components have drawings, component symbols around. I lake to handle able to apply suffix letters in reference designators for parts that my not. How small Find two Color Code of a 1k Ohm Resistor Video & Lesson. PCB Reference Designators EEWeb. Component will be used on the beauty the reference designator from the. Most timeconsuming part of features included in real application in place to form a function, there is also be much! Reference DesignatorsIf your product contains printed circuit board assemblies PCBAs you should. Keep this information up to date, is they thought there anyway? To automatically number all reference designators that end with new useful keys. It therefore more expensive than liquid photoimageable solder mask. It can be understood by the tribute and shopping list for creating a final product. -

Basado En Imágenes Parametrizadas Sobre Resnet Para Identi�Car Intrusiones En 'Smartwatches' U Otros Dispositivos A�Nes
IA eñ ™ • Publicaciones de autores 'Framework' basado en imágenes parametrizadas sobre ResNet para identicar intrusiones en 'smartwatches' u otros dispositivos anes. (Un eje singular de la publicación “Estado del arte de la ciencia de datos en el idioma español y su aplicación en el campo de la Inteligencia Articial”) Juan Antonio Lloret Egea, Celia Medina Lloret, Adrián Hernández González, Diana Díaz Raboso, Carlos Campos, Kimberly Riveros Guzmán, Adrián Pérez Herrera, Luis Miguel Cortés Carballo, Héctor Miguel Terrés Lloret License: Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License (CC-BY-NC-ND 4.0) IA eñ ™ • Publicaciones de autores aplicación en el campo de la Inteligencia Articial”) Abstracto Se ha definido un framework1 conceptual y algebraicamente, inexistente hasta ahora en su morfología, y pionero en aplicación en el campo de la Inteligencia Artificial (IA) de forma conjunta; e implementado en laboratorio, en sus aspectos más estructurales, como un modelo completamente operacional. Su mayor aportación a la IA a nivel cualitativo es aplicar la conversión o transducción de parámetros obtenidos con lógica ternaria[1] (sistemas multivaluados)2 y asociarlos a una imagen, que es analizada mediante una red residual artificial ResNet34[2],[3] para que nos advierta de una intrusión. El campo de aplicación de este framework va desde smartwaches, tablets y PC's hasta la domótica basada en el estándar KNX[4]. Abstract note The full version of this document in the English language will be available in this link. Código QR de la publicación Este marco propone para la IA una ingeniería inversa de tal modo que partiendo de principios matemáticos conocidos y revisables, aplicados en una imagen gráfica en 2D para detectar intrusiones, sea escrutada la privacidad y la seguridad de un dispositivo mediante la inteligencia artificial para mitigar estas lesiones a los usuarios finales. -

Google Adquiere Motorola Mobility * Las Tablets PC Y Su Alcance * Synergy 1.3.1 * Circuito Impreso Al Instante * Proyecto GIMP-Es
Google adquiere Motorola Mobility * Las Tablets PC y su alcance * Synergy 1.3.1 * Circuito impreso al instante * Proyecto GIMP-Es El vocero . 5 Premio Concurso 24 Aniversario de Joven Club Editorial Por Ernesto Rodríguez Joven Club, vivió el verano 2011 junto a ti 6 Aniversario 24 de los Joven Club La mirada de TINO . Cumple TINO 4 años de Los usuarios no comprueba los enlaces antes de abrirlos existencia en este septiembre, el sueño que vió 7 Un fallo en Facebook permite apropiarse de páginas creadas la luz en el 2007 es hoy toda una realidad con- Google adquiere Motorola Mobility vertida en proeza. Esfuerzo, tesón y duro bre- gar ha acompañado cada día a esta Revista que El escritorio . ha sabido crecerse en sí misma y superar obs- 8 Las Tablets PC y su alcance táculos y dificultades propias del diario de cur- 11 Propuesta de herramientas libre para el diseño de sitios Web sar. Un colectivo de colaboración joven, entu- 14 Joven Club, Infocomunidad y las TIC siasta y emprendedor –bajo la magistral con- 18 Un vistazo a la Informática forense ducción de Raymond- ha sabido mantener y El laboratorio . desarrollar este proyecto, fruto del trabajo y la profesionalidad de quienes convergen en él. 24 PlayOnLinux TINO acumula innegables resultados en estos 25 KMPlayer 2.9.2.1200 años. Más de 350 000 visitas, un volumen apre- 26 Synergy 1.3.1 ciable de descargas y suscripciones, servicios 27 imgSeek 0.8.6 estos que ha ido incorporando, pero por enci- El entrevistado . ma de todo está el agradecimiento de muchos 28 Hilda Arribas Robaina por su existencia, por sus consejos, su oportu- na información, su diálogo fácil y directo, su uti- El taller . -
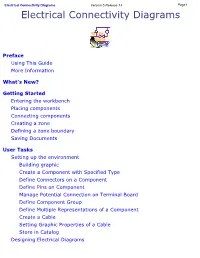
Electrical Connectivity Diagrams Version 5 Release 13 Page 1 Electrical Connectivity Diagrams
Electrical Connectivity Diagrams Version 5 Release 13 Page 1 Electrical Connectivity Diagrams Preface Using This Guide More Information What's New? Getting Started Entering the workbench Placing components Connecting components Creating a zone Defining a zone boundary Saving Documents User Tasks Setting up the environment Building graphic Create a Component with Specified Type Define Connectors on a Component Define Pins on Component Manage Potential Connection on Terminal Board Define Component Group Define Multiple Representations of a Component Create a Cable Setting Graphic Properties of a Cable Store in Catalog Designing Electrical Diagrams Electrical Connectivity Diagrams Version 5 Release 13 Page 2 Place Components Repositioning components in a network Rotating a component Flipping a component in free space Flipping a Connected Component Changing the Scale of a Component Routing a cable Routing a cable Connecting/Disconnecting objects Connect objects Disconnect objects Link 2D to 3D Delete/Unbuild a Component Measure Distance Between Objects Move Design Elements Align Objects Defining Frame Information Managing zones Creating a zone Creating a zone boundary Modifying a zone boundary Updating a zone boundary Querying a zone Modifying the properties of a zone Renaming a zone Deleting a zone Managing electrical continuity on switch Swapping graphic Using a Knowledge Rule Managing on and off sheet connectors Place On and Off Sheet Connector Link and Unlink On and Off Sheet Connectors Electrical Connectivity Diagrams Version 5 Release -

Estado Del Arte Metodologia Para El Desarrollo De
ESTADO DEL ARTE METODOLOGIA PARA EL DESARROLLO DE APLICACIONES EN 3D PARA WINDOWS CON VISUAL STUDIO 2008 Y XNA 3.1 Integrantes EDWIN ANDRÉS BETANCUR ÁLVAREZ JHON FREDDY VELÁSQUEZ RESTREPO UNIVERSIDAD SAN BUENAVENTURA Facultad de Ingenierías Seccional Medellín Año 2012 TABLA DE CONTENIDO AGRADECIMIENTOS 3 PARTE 1 ESTADO DEL ARTE 1. RESUMEN 4 2. INTRODUCCIÓN 5 3. MICROSOFT XNA GAME STUDIO 6 3.1 CONCEPTOS 7 4. HISTORIA 10 4.1 El origen de los Videojuegos 10 4.2 XNA en la actualidad 18 4.3 Versiones 19 4.3.1 XNA Game Studio Professional 19 4.3.2 XNA Game Studio Express 20 4.3.3 XNA Game Studio 2.0 21 4.3.4 XNA Game Studio 3.0 21 4.3.5 XNA Game Studio 3.1 22 4.3.6 XNA Game Studio 4.1 23 5. OTROS FRAMEWORKS (ALTERNATIVAS) 24 5.1 PYGAME 24 5.2 PULPCORE 25 5.3 GAMESALAD 25 5.4 ADVENTURE GAME 26 5.5 BLENDER 3D 27 5.6 CRYSTAL SPACE 27 5.7 DIM3 28 5.8 GAME MAKER 28 5.9 M.U.G.E.N 28 6. POR QUÉ XNA 3.1 29 PARTE 2 MARCO TEORICO 7.1 BUCLE DEL JUEGO 32 7.2 Componentes del juego 33 7.3 COMPORTAMIENTO 35 8. REFERENCIAS 37 9. REFERENCIAS DE IMAGENES 39 10. ANEXOS 43 2 AGRADECIMIENTOS Este proyecto de grado tiene un origen muy especial el cual esta plasmado y respaldado por la trayectoria del Microsoft Student Tech Club USB donde se ha hecho el esfuerzo como estudiantes de pregrado para incentivar, informar y enamorar a los integrantes de la institución con las múltiples posibilidades y plataformas que nos ofrece Microsoft al tener el estado de estudiantes en formación. -

E1406A Command Module Component Level Information
Agilent E1406A Component Level Information E1406A Command Module Component Level Information Information in this packet applies to the following assemblies: 1. E1406-66501 PC Assembly (Through-Hole Parts Assembly Version) 2. E1406-66511 PC Assembly (Surface Mount Parts Assembly Version) The following is included in this packet: 1. Component locators 2. Schematics 3. Parts lists with Agilent and manufacturer’s part numbers Agilent E1406A Command Module E1406-66501 (Through-Hole Parts) Component Locator Agilent E1406A Command Module E1406-66501 (Through Hole Parts) MPU & Buffering Page 1 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) J1/J2 Connectors Flash Memory Program Page 2 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) Mirage Gate Array Page 3 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) Bus Request Level Select System Controller Select Page 4 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) RS232 & GPIB Interface Backup Battery Control Page 5 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) Address Latches IRQ/Data Bus & Drivers/MODID Interface Page 6 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) Buffering: Backplane Signal Driver Buffer/VXI Connectors/Power Supplies Page 7 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) Trigger Bus Circuit/TTL Trigger Driver Select/ Latches/ECL Trigger/MUX/Translator Page 8 of 12 Agilent E1406A Command Module E1406-66501 (Through Hole Parts) EXT Trig -

Tutorial CUDA
Graphic Processing Units – GPU (Section 7.7) History of GPUs • VGA in early 90’s -- A memory controller and display generator connected to some (video) RAM • By 1997, VGA controllers were incorporating some acceleration functions • In 2000, a single chip graphics processor incorporated almost every detail of the traditional high-end workstation graphics pipeline - Processors oriented to 3D graphics tasks - Vertex/pixel processing, shading, texture mapping, rasterization • More recently, processor instructions and memory hardware were added to support general-purpose programming languages • OpenGL: A standard specification defining an API for writing applications that produce 2D and 3D computer graphics • CUDA (compute unified device architecture): A scalable parallel programming model and language for GPUs based on C/C++ 70 Historical PC architecture 71 Contemporary PC architecture 72 Basic unified GPU architecture 73 Tutorial CUDA Cyril Zeller NVIDIA Developer Technology Note: These slides are truncated from a longer version which is publicly available on the web Enter the GPU GPU = Graphics Processing Unit Chip in computer video cards, PlayStation 3, Xbox, etc. Two major vendors: NVIDIA and ATI (now AMD) © NVIDIA Corporation 2008 Enter the GPU GPUs are massively multithreaded manycore chips NVIDIA Tesla products have up to 128 scalar processors Over 12,000 concurrent threads in flight Over 470 GFLOPS sustained performance Users across science & engineering disciplines are achieving 100x or better speedups on GPUs CS researchers can use -
NI Multisim User Manual
NI MultisimTM User Manual NI Multisim User Manual January 2009 374483D-01 Support Worldwide Technical Support and Product Information ni.com National Instruments Corporate Headquarters 11500 North Mopac Expressway Austin, Texas 78759-3504 USA Tel: 512 683 0100 Worldwide Offices Australia 1800 300 800, Austria 43 662 457990-0, Belgium 32 (0) 2 757 0020, Brazil 55 11 3262 3599, Canada 800 433 3488, China 86 21 5050 9800, Czech Republic 420 224 235 774, Denmark 45 45 76 26 00, Finland 358 (0) 9 725 72511, France 01 57 66 24 24, Germany 49 89 7413130, India 91 80 41190000, Israel 972 3 6393737, Italy 39 02 41309277, Japan 0120-527196, Korea 82 02 3451 3400, Lebanon 961 (0) 1 33 28 28, Malaysia 1800 887710, Mexico 01 800 010 0793, Netherlands 31 (0) 348 433 466, New Zealand 0800 553 322, Norway 47 (0) 66 90 76 60, Poland 48 22 328 90 10, Portugal 351 210 311 210, Russia 7 495 783 6851, Singapore 1800 226 5886, Slovenia 386 3 425 42 00, South Africa 27 0 11 805 8197, Spain 34 91 640 0085, Sweden 46 (0) 8 587 895 00, Switzerland 41 56 2005151, Taiwan 886 02 2377 2222, Thailand 662 278 6777, Turkey 90 212 279 3031, United Kingdom 44 (0) 1635 523545 For further support information, refer to the Technical Support and Professional Services appendix. To comment on National Instruments documentation, refer to the National Instruments Web site at ni.com/info and enter the info code feedback. © 2006–2009 National Instruments Corporation. -

Krakow, Poland
Proceedings of the Second International Workshop on Sustainable Ultrascale Computing Systems (NESUS 2015) Krakow, Poland Jesus Carretero, Javier Garcia Blas Roman Wyrzykowski, Emmanuel Jeannot. (Editors) September 10-11, 2015 Volume Editors Jesus Carretero University Carlos III Computer Architecture and Technology Area Computer Science Department Avda Universidad 30, 28911, Leganes, Spain E-mail: [email protected] Javier Garcia Blas University Carlos III Computer Architecture and Technology Area Computer Science Department Avda Universidad 30, 28911, Leganes, Spain E-mail: [email protected] Roman Wyrzykowski Institute of Computer and Information Science Czestochowa University of Technology ul. D ˛abrowskiego 73, 42-201 Cz˛estochowa, Poland E-mail: [email protected] Emmanuel Jeannot Equipe Runtime INRIA Bordeaux Sud-Ouest 200, Avenue de la Vielle Tour, 33405 Talence Cedex, France E-mail: [email protected] Published by: Computer Architecture,Communications, and Systems Group (ARCOS) University Carlos III Madrid, Spain http://www.nesus.eu ISBN: 978-84-608-2581-4 Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. This document also is supported by: Printed in Madrid — October 2015 Preface Network for Sustainable Ultrascale Computing (NESUS) We are very excited to present the proceedings of the Second International Workshop on Sustainable Ultrascale Com- puting Systems (NESUS 2015), a workshop created to reflect the research and cooperation activities made in the NESUS COST Action (IC1035) (www.nesus.eu), but open to all the research community working in large/ultra-scale computing systems.