Embedded Real Time Operating Systems (Besb22)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Extending Gnu Troff to Produce Html Through The
G. MULLEY and W.LEMBERG: EXTENDING GNU TROFF TOPRODUCE HTML EXTENDING GNU TROFF TOPRODUCE HTML THROUGH THE TECHNIQUE OF NEXT EVENT SIMULATION GAIUS MULLEY,WERNER LEMBERG School of Computing,University of Glamorgan, CF37 1DL, UK E-Mail: [email protected] Kl. Beurhausstr.1,44137 Dortmund, Germany E-Mail: [email protected] Abstract: This paper reports on a technique used to generate accurate HTML output from GNU Troff. GNU Troff is a typesetting package which reads plain text mixed with formatting commands and produces formatted output. It supports a number of devices and nowsupports the production of HTML.The paper discusses the design of the HTML device driver grohtml and modifications made to GNU Troff. The front end program troff wasmodi- fied to maintain a reduced state machine which is examined each time a glyph is passed to the back end device driver(post-grohtml). Anychange in system state between the production of twoglyphs results in a sequence of events being passed to the device driver. There is a direct correspondence between this technique and creating ascript for a next event simulation queue. Furthermore the device driverreconstructs the system state and for- mats the HTML according to state changes caused when processing the event queue. This technique works well, as it minimises the state information passed from front end to back end device driverwhilst still preserving the high levellayout of the text. Using this technique GNU Troffeffectively translates input source into another mark-up language and thus this technique could be extended to translate GNU Troffdocuments into anyofthe OpenOffice supported formats. -
Introduction to Computer System
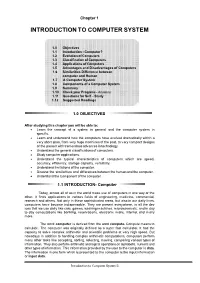
Chapter 1 INTRODUCTION TO COMPUTER SYSTEM 1.0 Objectives 1.1 Introduction –Computer? 1.2 Evolution of Computers 1.3 Classification of Computers 1.4 Applications of Computers 1.5 Advantages and Disadvantages of Computers 1.6 Similarities Difference between computer and Human 1.7 A Computer System 1.8 Components of a Computer System 1.9 Summary 1.10 Check your Progress - Answers 1.11 Questions for Self – Study 1.12 Suggested Readings 1.0 OBJECTIVES After studying this chapter you will be able to: Learn the concept of a system in general and the computer system in specific. Learn and understand how the computers have evolved dramatically within a very short span, from very huge machines of the past, to very compact designs of the present with tremendous advances in technology. Understand the general classifications of computers. Study computer applications. Understand the typical characteristics of computers which are speed, accuracy, efficiency, storage capacity, versatility. Understand limitations of the computer. Discuss the similarities and differences between the human and the computer. Understand the Component of the computer. 1.1 INTRODUCTION- Computer Today, almost all of us in the world make use of computers in one way or the other. It finds applications in various fields of engineering, medicine, commercial, research and others. Not only in these sophisticated areas, but also in our daily lives, computers have become indispensable. They are present everywhere, in all the dev ices that we use daily like cars, games, washing machines, microwaves etc. and in day to day computations like banking, reservations, electronic mails, internet and many more. -

The Strange Birth and Long Life of Unix - IEEE Spectrum Page 1 of 6
The Strange Birth and Long Life of Unix - IEEE Spectrum Page 1 of 6 COMPUTING / SOFTWARE FEATURE The Strange Birth and Long Life of Unix The classic operating system turns 40, and its progeny abound By WARREN TOOMEY / DECEMBER 2011 They say that when one door closes on you, another opens. People generally offer this bit of wisdom just to lend some solace after a misfortune. But sometimes it's actually true. It certainly was for Ken Thompson and the late Dennis Ritchie, two of the greats of 20th-century information technology, when they created the Unix operating system, now considered one of the most inspiring and influential pieces of software ever written. A door had slammed shut for Thompson and Ritchie in March of 1969, when their employer, the American Telephone & Telegraph Co., withdrew from a collaborative project with the Photo: Alcatel-Lucent Massachusetts Institute of KEY FIGURES: Ken Thompson [seated] types as Dennis Ritchie looks on in 1972, shortly Technology and General Electric after they and their Bell Labs colleagues invented Unix. to create an interactive time- sharing system called Multics, which stood for "Multiplexed Information and Computing Service." Time-sharing, a technique that lets multiple people use a single computer simultaneously, had been invented only a decade earlier. Multics was to combine time-sharing with other technological advances of the era, allowing users to phone a computer from remote terminals and then read e -mail, edit documents, run calculations, and so forth. It was to be a great leap forward from the way computers were mostly being used, with people tediously preparing and submitting batch jobs on punch cards to be run one by one. -

The Strange Birth and Long Life of Unix - IEEE Spectrum
The Strange Birth and Long Life of Unix - IEEE Spectrum http://spectrum.ieee.org/computing/software/the-strange-birth-and-long-li... COMPUTING / SOFTWARE FEATURE The Strange Birth and Long Life of Unix The classic operating system turns 40, and its progeny abound By WARREN TOOMEY / DECEMBER 2011 They say that when one door closes on you, another opens. People generally offer this bit of wisdom just to lend some solace after a misfortune. But sometimes it's actually true. It certainly was for Ken Thompson and the late Dennis Ritchie, two of the greats of 20th-century information technology, when they created the Unix operating system, now considered one of the most inspiring and influential pieces of software ever written. A door had slammed shut for Thompson and Ritchie in March of 1969, when their employer, the American Telephone & Telegraph Co., withdrew from a collaborative project with the Photo: Alcatel-Lucent Massachusetts Institute of KEY FIGURES: Ken Thompson [seated] types as Dennis Ritchie looks on in 1972, shortly Technology and General Electric after they and their Bell Labs colleagues invented Unix. to create an interactive time-sharing system called Multics, which stood for "Multiplexed Information and Computing Service." Time-sharing, a technique that lets multiple people use a single computer simultaneously, had been invented only a decade earlier. Multics was to combine time-sharing with other technological advances of the era, allowing users to phone a computer from remote terminals and then read e-mail, edit documents, run calculations, and so forth. It was to be a great leap forward from the way computers were mostly being used, with people tediously preparing and submitting batch jobs on punch cards to be run one by one. -

Reflections on Software Research
TURING AWARD LECTURE Reflections on Software Research Can the circumstances that existed in Bell Labs that nurtured the UNIX project be produced again? DENNIS M. RITCHIE The UNIX 1 operating system has suddenly become System V is a supported product on several different news, but it is not new. It began in 1969 when Ken hardware lines, most recently including the 3B systems Thompson discovered a little-used PDP-7 computer and designed and built by AT&T. set out to fashion a computing environment that he UNIX is in wide use, and is now even spoken of as a liked. His work soon attracted me; I joined in the enter- possible industry standard. How did it come to suc- prise, though most of the ideas, and most of the work ceed? for that matter, were his. Before long, others from our There are, of course, its technical merits. Because the group in the research area of AT&T Bell Laboratories system and its history have been discussed at some were using the system; Joe Ossanna, Doug McIlroy, and length in the literature [6, 7, 11], I will not talk about Bob Morris were especially enthusiastic critics and con- these qualities except for one; despite its frequent sur- tributors. In 1971, we acquired a PDP-11, and by the face inconsistency, so colorfully annotated by Don Nor- end of that year we were supporting our first real users: man in his Datamation article [4] and despite its rich- three typists entering patent applications. In 1973, the ness, UNIX is a simple, coherent system that pushes a system was rewritten in the C language, and in that few good ideas and models to the limit. -

Squinting at Power Series
Squinting at Power Series M. Douglas McIlroy AT&T Bell Laboratories Murray Hill, New Jersey 07974 ABSTRACT Data streams are an ideal vehicle for handling power series. Stream implementations can be read off directly from simple recursive equations that de®ne operations such as multiplication, substitution, exponentiation, and reversion of series. The bookkeeping that bedevils these algorithms when they are expressed in traditional languages is completely hidden when they are expressed in stream terms. Communicating processes are the key to the simplicity of the algorithms. Working versions are presented in newsqueak, the language of Pike's ``squint'' system; their effectiveness depends critically on the stream protocol. Series and streams Power series are natural objects for stream processing. Pertinent computations are neatly describable by recursive equations. CSP (communicating sequential process) languages1, 2 are good vehicles for implementation. This paper develops the algorithmic ideas and reduces them to practice in a working CSP language,3 not coincidentally illustrating the utility of concurrent programming notions in untangling the logic of some intricate computations on sequences. This elegant approach to power series computation, ®rst demonstrated but never published by Kahn and MacQueen as an application of their data stream system, is still little known.4 Power series are represented as streams of coef®cients, the exponents being given implicitly by ordinal position. (This is an in®nite analogue of the familiar representation of a polynomial as an array of coef®cients.) Thus the power series for the exponential function ∞ 1 1 1 e x = Σ x n / n! = 1 + x + __ x 2 + __ x 3 + ___ x 4 + . -

Uma Introdução À Computação: História E Ciência Editora Ixtlan - São Paulo – 2016
São Paulo – 2016 Copyright © Autores diversos Projeto gráfico: Editora Ixtlan Revisão: Eduardo Telmo Fonseca Santos Milena Montenegro Pereira Diagramação: Márcia Todeschini Capa: Gabriel Polizello Uma introdução à computação: história e ciência Editora Ixtlan - São Paulo – 2016 ISBN: 978-85-8197-510-8 1.Ciência da computação 2.história CDD 000 Editora Ixtlan - CNPJ 11.042.574/0001-49 - I.E. 456166992117 [email protected] – www.editoraixtlan.com DIREITOS PRESERVADOS – É proibida a reprodução total ou parcial, de qualquer forma ou por qualquer meio. A violação dos direitos de autor (Lei Federal 9.610/1998) é crime previsto no art. 184 do Código Penal. Sumário 1. Início da computação - 3 2. Software - 19 3. Representação da Informação - 27 4. Ciência da Computação é Ciência? - 35 5. Rede de Computadores - 37 6. Exercícios Complementares - 49 7. Bibliografia - 53 Cap´ıtulo 1 Início da computação Para entender os fundamentos da computação atual é preciso olhar para o passado e ver como essa disciplina/área foi fundada e como vem se desenvolvendo até a atualidade [5]. Uma das bases da computação é a Matemática. Desde os primórdios o ser humano percebeu a necessidade de desenvolver algo para auxiliá-lo nas mais diversas operações. Essa necessidade é a responsável pelo surgimento desde as máquinas de calcular até as mais diversas máquinas utilizadas no mundo todo. Em torno de 2600 anos a.C., surgiu um dos primeiros instrumentos manuais voltados para ajudar o homem a calcular quantias numéricas. Esse instrumento usado para representação dos números era o ábaco chinês, que apesar do tempo em que surgiu, ainda é comumente utilizado em certas localidades. -

Universidad Nacional Autónoma De México, Por Permitirme El Honor De Formar Parte De Ella
Universidad Nacional Autónoma de México FACULTAD DE INGENIERÍA “SISTEMA DE MONITOREO DE SERVIDORES UNIX” T E S I S Que para obtener el Título de: INGENIERO EN COMPUTACIÓN P r e s e n t a: EDGAR CRISTÓBAL RAMÍREZ MIRANDA Director de Tesis: Ing. Noé Cruz Marín Agradecimientos Más que gracias, mi eterno amor a mi padre, mi madre y a mis hermanos a los cuales les debo lo que soy. Papá te admiro y respeto profundamente por la rectitud y honradez con la que te conduces a cada paso de tu vida, por el apoyo y dirección que siempre de ti he recibido, por todas las enseñanzas que desde chico recibí de ti y espero seguir recibiendo. Mamá te amo por todos los años de dedicación que me has dado, por los desvelos, por las lágrimas, por los cariños, por tu inmensa ternura y compasión, por que no encuentro ni encontraré jamás la forma de pagarte todo lo que me has dado, gracias. A mi hermano Emilio por ser mi amigo, por enseñarme a defenderme, por ser mi ídolo, por ensañarme a no desistir nunca hasta alcanzar las metas, porque a tu lado siempre me sentí protegido, por alentarme a ser ingeniero. A mi hermano Joaquín, por que de ti aprendí a ser más sereno a pensar antes de actuar, por siempre protegerme de todos sin importarte nada, por estar conmigo en las buenas y en las malas, por tu tolerancia, por ser mi amigo en los tiempos difíciles. Gracias por aguantarme, soportarme, cuidarme y quererme de la forma en la que lo hacen, estoy y siempre estaré orgulloso de pertenecer a la familia Ramírez Miranda. -
Lezione 11 Processi Sistemi Operativi (9 CFU), Cdl Informatica, A
Lezione 11 Processi Sistemi Operativi (9 CFU), CdL Informatica, A. A. ! !" ! 1 Dipartimento di Scienze Fisic$e, Informatic$e e %atematic$e Universit& di %odena e Re((io )mi*ia $ttp+"",e-*a-.in(..nimo.it"peop*e"andreo*ini"didattica"sistemi/operativi 1 0.ote of t$e da1 (%editate, (ente, meditate...) “This is the UNIX philosophy: write programs that do one thing and do it well. Write programs to work together. Write programs to handle text streams, because that is a niversal inter"ace.# #o.(*as McI*ro1 (192 -) %atematico, In(e(nere, Programmatore Inventore de**e pipe e de**e utilit1 U3I4 2 SOLUZIONI DEGLI ESERCIZI 3 Esercizio 1 (1 min.) 0.al 5 il PID del processo init (il (estore dei servizi U3I4)6 4 Identi7cazione esatta con pidof Il PID del processo init p.8 essere individ.ato a partire dal s.o nome esatto con i* comando pidof+ pidof init Si dovre--e ottenere il PID 1. 5 Esercizio 2 (2 min.) I processi del des9top :;3OM)< iniziano con la strin(a :(nome<. Come si possono individ.are i processi del des9top in esec.zione6 6 Individuazione tramite pgrep I processi de**=am-iente des9top ;3OME possono essere individ.ati cercando *=espressione re(olare ^gnome.*$ con il comando pgrep+ pgrep ^gnome.*$ Per stampare anc$e i nomi dei comandi si .sa *=opzione -l+ pgrep -l ^gnome.*$ 7 Esercizio 3 (2 min.) Elencate t.tti i processi (e relativi PID) ese(.iti per conto del vostro .sername. Le((ete la pa(ina di man.ale del comando opportuno per capire come fare. -

Praktikum Iz Softverskih Alata U Elektronici
PRAKTIKUM IZ SOFTVERSKIH ALATA U ELEKTRONICI 2017/2018 Predrag Pejović 31. decembar 2017 Linkovi na primere: I OS I LATEX 1 I LATEX 2 I LATEX 3 I GNU Octave I gnuplot I Maxima I Python 1 I Python 2 I PyLab I SymPy PRAKTIKUM IZ SOFTVERSKIH ALATA U ELEKTRONICI 2017 Lica (i ostali podaci o predmetu): I Predrag Pejović, [email protected], 102 levo, http://tnt.etf.rs/~peja I Strahinja Janković I sajt: http://tnt.etf.rs/~oe4sae I cilj: savladavanje niza programa koji se koriste za svakodnevne poslove u elektronici (i ne samo elektronici . ) I svi programi koji će biti obrađivani su slobodan softver (free software), legalno možete da ih koristite (i ne samo to) gde hoćete, kako hoćete, za šta hoćete, koliko hoćete, na kom računaru hoćete . I literatura . sve sa www, legalno, besplatno! I zašto svake godine (pomalo) updated slajdovi? Prezentacije predmeta I engleski I srpski, kraća verzija I engleski, prezentacija i animacije I srpski, prezentacija i animacije A šta se tačno radi u predmetu, koji programi? 1. uvod (upravo slušate): organizacija nastave + (FS: tehnička, ekonomska i pravna pitanja, kako to uopšte postoji?) (≈ 1 w) 2. operativni sistem (GNU/Linux, Ubuntu), komandna linija (!), shell scripts, . (≈ 1 w) 3. nastavak OS, snalaženje, neki IDE kao ilustracija i vežba, jedan Python i jedan C program . (≈ 1 w) 4.L ATEX i LATEX 2" (≈ 3 w) 5. XCircuit (≈ 1 w) 6. probni kolokvijum . (= 1 w) 7. prvi kolokvijum . 8. GNU Octave (≈ 1 w) 9. gnuplot (≈ (1 + ) w) 10. wxMaxima (≈ 1 w) 11. drugi kolokvijum . 12. Python, IPython, PyLab, SymPy (≈ 3 w) 13. -

Language Technology for Cultural Heritage Data (Latech 2007), Pages 41–48, Prague, Czech Republic, June
The Workshop Programme 9:30- 9:35 Introduction 9:35-10:00 Penny Labropoulou, Harris Papageorgiou, Byron Georgantopoulos, Dimitra Tsagogeorga, Iason Demiros and Vassilios Antonopoulos: "Integrating Language Technology in a web-enabled Cultural Heritage system" 10:00-10:30 Oto Vale, Arnaldo Candido Junior, Marcelo Muniz, Clarissa Bengtson, Lívia Cucatto, Gladis Almeida, Abner Batista, Maria Cristina Parreira da Silva, Maria Tereza Biderman and Sandra Aluísio: "Building a large dictionary of abbreviations for named entity recognition in Portuguese historical corpora" 11:00-11:30 Eiríkur Rögnvaldsson and Sigrún Helgadóttir: "Morphological tagging of Old Norse texts and its use in studying syntactic variation and change" 11:30-12:00 Lars Borin and Markus Forsberg: "Something Old, Something New: A Computational Morphological Description of Old Swedish" 12:00-12:30 Dag Trygve Truslew Haug and Marius Larsen Jøhndal: "Creating a Parallel Treebank of the Old Indo-European Bible Translations" 12:30-12:55 Elena Grishina: "Non-Standard Russian in Russian National Corpus (RNC)" 12:55-13:20 Dana Dannélls: "Generating tailored texts for museum exhibits" 14:30-15:00 David Bamman and Gregory Crane: "The Logic and Discovery of Textual Allusion" 15:00-15:30 Dimitrios Vogiatzis, Galanis Dimitrios, Vangelis Karkaletsis and Ion Androutsopoulos: "A Conversant Robotic Guide to Art Collections" 15:30-16:00 René Witte, Thomas Gitzinger, Thomas Kappler and Ralf Krestel: "A Semantic Wiki Approach to Cultural Heritage Data Management" 16:30-17:15 Christoph Ringlstetter: "Error Correction in OCR-ed Data"- Invited Talk 17:15-17:30 Closing i Workshop Organisers Caroline Sporleder (Co-Chair), Saarland University, Germany Kiril Ribarov (Co-Chair), Charles University, Czech Republic Antal van den Bosch, Tilburg University, The Netherlands Milena P. -

The History of Unix in the History of Software Haigh Thomas
The History of Unix in the History of Software Haigh Thomas To cite this version: Haigh Thomas. The History of Unix in the History of Software. Cahiers d’histoire du Cnam, Cnam, 2017, La recherche sur les systèmes : des pivots dans l’histoire de l’informatique – II/II, 7-8 (7-8), pp77-90. hal-03027081 HAL Id: hal-03027081 https://hal.archives-ouvertes.fr/hal-03027081 Submitted on 9 Dec 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. 77 The History of Unix in the History of Software Thomas Haigh University of Wisconsin - Milwaukee & Siegen University. You might wonder what I am doing The “software crisis” and here, at an event on this history of Unix. the 1968 NATO Conference As I have not researched or written about on Software Engineering the history of Unix I had the same question myself. But I have looked at many other The topic of the “software crisis” things around the history of software and has been written about a lot by profes- this morning will be talking about how sional historians, more than anything some of those topics, including the 1968 else in the entire history of software2.