Integrating ACT-R Cognitive Models with the Unity Game Engine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Distributed Computational Cognitive Model for Object Recognition
SCIENCE CHINA xx xxxx Vol. xx No. x: 1{15 doi: A Distributed Computational Cognitive Model for Object Recognition Yong-Jin Liu1∗, Qiu-Fang Fu2, Ye Liu2 & Xiaolan Fu2 1Tsinghua National Laboratory for Information Science and Technology, Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China, 2State Key Lab of Brain and Cognitive Science, Institute of Psychology, Chinese Academy of Sciences, Beijing 100101, China Received Month Day, Year; accepted Month Day, Year Abstract Based on cognitive functionalities in human vision processing, we propose a computational cognitive model for object recognition with detailed algorithmic descriptions. The contribution of this paper is of two folds. Firstly, we present a systematic review on psychological and neurophysiological studies, which provide collective evidence for a distributed representation of 3D objects in the human brain. Secondly, we present a computational model which simulates the distributed mechanism of object vision pathway. Experimental results show that the presented computational cognitive model outperforms five representative 3D object recognition algorithms in computer science research. Keywords distributed cognition, computational model, object recognition, human vision system 1 Introduction Object recognition is one of fundamental tasks in computer vision. Many recognition algorithms have been proposed in computer science area (e.g., [1, 2, 3, 4, 5]). While the CPU processing speed can now be reached at 109 Hz, the human brain has a limited speed of 100 Hz at which the neurons process their input. However, compared to state-of-the-art computational algorithms for object recognition, human brain has a distinct advantage in object recognition, i.e., human being can accurately recognize one from unlimited variety of objects within a fraction of a second, even if the object is partially occluded or contaminated by noises. -

Designing Multivocal Museums Designing Multivocal Museums Intercultural Practices at Museo Designing Diocesano, Milano
Books designing multivocal museums designing multivocal museums intercultural practices at museo designing diocesano, milano This book presents the process of designing multivocal of a museum experience, included in MeLa Project’s research, and accomplished at the Museo Diocesano di Milano. museums The museum experience put together many relevant issues for the renewal of museum Intercultural Practices at Museo interpretation, using a design discourse to Diocesano, Milano explore the combination of technological tools and multi-vocal content to enable diverse dynamics of cultural representation. edited by The volume maps the entire process of a Rita Capurro and Eleonora Lupo cross-disciplinary research to develop possible scenarios that can be translated not only as test verification of the theoretical investigations but Lupo edited by Rita Capurro and Eleonora also into the production of various experimental exhibition designs. With contributions by: Rita Capurro, Sara Chie- sa, Luca Greci, Eleonora Lupo, Ece Özdil, Davide Spallazzo, Raffaella Trocchianesi. editors Rita Capurro, Art Historian, Ph.D., Inde- pendent Researcher Eleonora Lupo, Ph.D., Associate Professor at School of Design, Politecnico di Milano. cover image — Test with users at Museo Diocesano, Milan, Raffaella Trocchianesi, 2014. Books MeLa–European Museums in an age of migrations 12 isbn978-88-941674-0-5 Designing Multivocal Museums: Intercultural Practices at Museo Diocesano, Milano Books Designing Multivocal Museums Intercultural Practices at Museo Diocesano, Milano edited by Rita Capurro and Eleonora Lupo Books 4 — designing multivocal museums: intercultural practices at museo diocesano, milano mela book 12 – designing multivocal museums intercultural practices at museo diocesano, milano. Published by Politecnico di Milano, Department of Design © January 2016, The Authors This work is provided on line as open access document under the terms of Creative Com- mons Attribution-NonCommercial-NoDerivatives 4.0 International. -

The Place of Modeling in Cognitive Science
The place of modeling in cognitive science James L. McClelland Department of Psychology and Center for Mind, Brain, and Computation Stanford University James L. McClelland Department of Psychology Stanford University Stanford, CA 94305 650-736-4278 (v) / 650-725-5699 (f) [email protected] Running Head: Modeling in cognitive science Keywords: Modeling frameworks, computer simulation, connectionist models, Bayesian approaches, dynamical systems, symbolic models of cognition, hybrid models, cognitive architectures Abstract I consider the role of cognitive modeling in cognitive science. Modeling, and the computers that enable it, are central to the field, but the role of modeling is often misunderstood. Models are not intended to capture fully the processes they attempt to elucidate. Rather, they are explorations of ideas about the nature of cognitive processes. As explorations, simplification is essential – it is only through simplification that we can fully understand the implications of the ideas. This is not to say that simplification has no downsides; it does, and these are discussed. I then consider several contemporary frameworks for cognitive modeling, stressing the idea that each framework is useful in its own particular ways. Increases in computer power (by a factor of about 4 million) since 1958 have enabled new modeling paradigms to emerge, but these also depend on new ways of thinking. Will new paradigms emerge again with the next 1,000-fold increase? 1. Introduction With the inauguration of a new journal for cognitive science, thirty years after the first meeting of the Cognitive Science Society, it seems essential to consider the role of computational modeling in our discipline. -

A Bayesian Computational Cognitive Model ∗
A Bayesian Computational Cognitive Model ∗ Zhiwei Shi Hong Hu Zhongzhi Shi Key Laboratory of Intelligent Information Processing Institute of Computing Technology, CAS, China Kexueyuan Nanlu #6, Beijing, China 100080 {shizw, huhong, shizz}@ics.ict.ac.cn Abstract problem solving capability and provide meaningful insights into mechanisms of human intelligence. Computational cognitive modeling has recently Besides the two categories of models, recently, there emerged as one of the hottest issues in the AI area. emerges a novel approach, hybrid neural-symbolic system, Both symbolic approaches and connectionist ap- which concerns the use of problem-specific symbolic proaches present their merits and demerits. Al- knowledge within the neurocomputing paradigm [d'Avila though Bayesian method is suggested to incorporate Garcez et al., 2002]. This new approach shows that both advantages of the two kinds of approaches above, modal logics and temporal logics can be effectively repre- there is no feasible Bayesian computational model sented in artificial neural networks [d'Avila Garcez and concerning the entire cognitive process by now. In Lamb, 2004]. this paper, we propose a variation of traditional Different from the hybrid approach above, we adopt Bayesian network, namely Globally Connected and Bayesian network [Pearl, 1988] to integrate the merits of Locally Autonomic Bayesian Network (GCLABN), rule-based systems and neural networks, due to its virtues as to formally describe a plausible cognitive model. follows. On the one hand, by encoding concepts -

Openbsd Gaming Resource
OPENBSD GAMING RESOURCE A continually updated resource for playing video games on OpenBSD. Mr. Satterly Updated August 7, 2021 P11U17A3B8 III Title: OpenBSD Gaming Resource Author: Mr. Satterly Publisher: Mr. Satterly Date: Updated August 7, 2021 Copyright: Creative Commons Zero 1.0 Universal Email: [email protected] Website: https://MrSatterly.com/ Contents 1 Introduction1 2 Ways to play the games2 2.1 Base system........................ 2 2.2 Ports/Editors........................ 3 2.3 Ports/Emulators...................... 3 Arcade emulation..................... 4 Computer emulation................... 4 Game console emulation................. 4 Operating system emulation .............. 7 2.4 Ports/Games........................ 8 Game engines....................... 8 Interactive fiction..................... 9 2.5 Ports/Math......................... 10 2.6 Ports/Net.......................... 10 2.7 Ports/Shells ........................ 12 2.8 Ports/WWW ........................ 12 3 Notable games 14 3.1 Free games ........................ 14 A-I.............................. 14 J-R.............................. 22 S-Z.............................. 26 3.2 Non-free games...................... 31 4 Getting the games 33 4.1 Games............................ 33 5 Former ways to play games 37 6 What next? 38 Appendices 39 A Clones, models, and variants 39 Index 51 IV 1 Introduction I use this document to help organize my thoughts, files, and links on how to play games on OpenBSD. It helps me to remember what I have gone through while finding new games. The biggest reason to read or at least skim this document is because how can you search for something you do not know exists? I will show you ways to play games, what free and non-free games are available, and give links to help you get started on downloading them. -

Connectionist Models of Language Processing
Cognitive Studies Preprint 2003, Vol. 10, No. 1, 10–28 Connectionist Models of Language Processing Douglas L. T. Rohde David C. Plaut Massachusetts Institute of Technology Carnegie Mellon University Traditional approaches to language processing have been based on explicit, discrete represen- tations which are difficult to learn from a reasonable linguistic environment—hence, it has come to be accepted that much of our linguistic representations and knowledge is innate. With its focus on learning based upon graded, malleable, distributed representations, connectionist modeling has reopened the question of what could be learned from the environment in the ab- sence of detailed innate knowledge. This paper provides an overview of connectionist models of language processing, at both the lexical and sentence levels. Although connectionist models have been applied to the full and processes of actual language users: Language is as lan- range of perceptual, cognitive, and motor domains (see Mc- guage does. In this regard, errors in performance (e.g., “slips Clelland, Rumelhart, & PDP Research Group, 1986; Quin- of the tongue”; Dell, Schwartz, Martin, Saffran, & Gagnon, lan, 1991; McLeod, Plunkett, & Rolls, 1998), it is in their 1997) are no less valid than skilled language use as a measure application to language that they have evoked the most in- of the underlying nature of language processing. The goal is terest and controversy (e.g., Pinker & Mehler, 1988). This not to abstract away from performance but to articulate com- is perhaps not surprising in light of the special role that lan- putational principles that account for it. guage plays in human cognition and culture. -

Cognitive Psychology for Deep Neural Networks: a Shape Bias Case Study
Cognitive Psychology for Deep Neural Networks: A Shape Bias Case Study Samuel Ritter * 1 David G.T. Barrett * 1 Adam Santoro 1 Matt M. Botvinick 1 Abstract to think of these models as black boxes, and to question whether they can be understood at all (Bornstein, 2016; Deep neural networks (DNNs) have advanced Lipton, 2016). This opacity obstructs both basic research performance on a wide range of complex tasks, seeking to improve these models, and applications of these rapidly outpacing our understanding of the na- models to real world problems (Caruana et al., 2015). ture of their solutions. While past work sought to advance our understanding of these models, Recent pushes have aimed to better understand DNNs: none has made use of the rich history of problem tailor-made loss functions and architectures produce more descriptions, theories, and experimental methods interpretable features (Higgins et al., 2016; Raposo et al., developed by cognitive psychologists to study 2017) while output-behavior analyses unveil previously the human mind. To explore the potential value opaque operations of these networks (Karpathy et al., of these tools, we chose a well-established analy- 2015). Parallel to this work, neuroscience-inspired meth- sis from developmental psychology that explains ods such as activation visualization (Li et al., 2015), abla- how children learn word labels for objects, and tion analysis (Zeiler & Fergus, 2014) and activation maxi- applied that analysis to DNNs. Using datasets mization (Yosinski et al., 2015) have also been applied. of stimuli inspired by the original cognitive psy- Altogether, this line of research developed a set of promis- chology experiments, we find that state-of-the-art ing tools for understanding DNNs, each paper producing one shot learning models trained on ImageNet a glimmer of insight. -

Card Game Maker: a Card Game Creation System for Unity
SBC - Proceedings of the SBGames 2014 | ISSN: 2179-2259 Card Game Maker: A card game creation system for Unity Rainer M. Vieira¹ João R. Bittencourt² Universidade do Vale do Rio dos Sinos, Brazil Abstract existing generic game engine and adapt it to run card games employing the specifications of the creation The current article reports the development process system. This engine, being a layer below the CGM, of a card game creation system bundled with an was named Card Game Maker Engine (CGME). engine to execute these games. To find out the project requirements, case studies of modern card This article is organized into six Sections: in games were used as guidelines to define common Section 1 the motivation for creating the CGM was components in card games that can be used to the presented; In Section 2 a brief review of related work development of said system. With the data acquired will be done; in Section 3 the results of case studies on these studies, a two-layered architecture model that demonstrate the common elements in classic and had been defined, demonstrated by a class diagram. modern card games will be reported; In Section 4 the With the architecture proposed, a study to define the CGME layer proposed model will be presented; In technology requirements to the project had been Section 5 the technological decisions for the made, defining the system as a Unity extension implementation of the presented model will be developed in C#. When the Card Game Maker presented; and finally, in Section 6 the concluding creational process is concluded, a complete game remarks will be made, also reporting future work. -
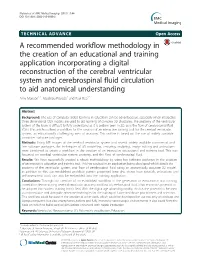
A Recommended Workflow Methodology in the Creation of An
Manson et al. BMC Medical Imaging (2015) 15:44 DOI 10.1186/s12880-015-0088-6 TECHNICAL ADVANCE Open Access A recommended workflow methodology in the creation of an educational and training application incorporating a digital reconstruction of the cerebral ventricular system and cerebrospinal fluid circulation to aid anatomical understanding Amy Manson1,2, Matthieu Poyade2 and Paul Rea1* Abstract Background: The use of computer-aided learning in education can be advantageous, especially when interactive three-dimensional (3D) models are used to aid learning of complex 3D structures. The anatomy of the ventricular system of the brain is difficult to fully understand as it is seldom seen in 3D, as is the flow of cerebrospinal fluid (CSF). This article outlines a workflow for the creation of an interactive training tool for the cerebral ventricular system, an educationally challenging area of anatomy. This outline is based on the use of widely available computer software packages. Methods: Using MR images of the cerebral ventricular system and several widely available commercial and free software packages, the techniques of 3D modelling, texturing, sculpting, image editing and animations were combined to create a workflow in the creation of an interactive educational and training tool. This was focussed on cerebral ventricular system anatomy, and the flow of cerebrospinal fluid. Results: We have successfully created a robust methodology by using key software packages in the creation of an interactive education and training tool. This has resulted in an application being developed which details the anatomy of the ventricular system, and flow of cerebrospinal fluid using an anatomically accurate 3D model. -
A Survey Full Text Available At
Full text available at: http://dx.doi.org/10.1561/0600000083 Publishing and Consuming 3D Content on the Web: A Survey Full text available at: http://dx.doi.org/10.1561/0600000083 Other titles in Foundations and Trends R in Computer Graphics and Vision Crowdsourcing in Computer Vision Adriana Kovashka, Olga Russakovsky, Li Fei-Fei and Kristen Grauman ISBN: 978-1-68083-212-9 The Path to Path-Traced Movies Per H. Christensen and Wojciech Jarosz ISBN: 978-1-68083-210-5 (Hyper)-Graphs Inference through Convex Relaxations and Move Making Algorithms Nikos Komodakis, M. Pawan Kumar and Nikos Paragios ISBN: 978-1-68083-138-2 A Survey of Photometric Stereo Techniques Jens Ackermann and Michael Goesele ISBN: 978-1-68083-078-1 Multi-View Stereo: A Tutorial Yasutaka Furukawa and Carlos Hernandez ISBN: 978-1-60198-836-2 Full text available at: http://dx.doi.org/10.1561/0600000083 Publishing and Consuming 3D Content on the Web: A Survey Marco Potenziani Visual Computing Lab, ISTI CNR [email protected] Marco Callieri Visual Computing Lab, ISTI CNR [email protected] Matteo Dellepiane Visual Computing Lab, ISTI CNR [email protected] Roberto Scopigno Visual Computing Lab, ISTI CNR [email protected] Boston — Delft Full text available at: http://dx.doi.org/10.1561/0600000083 Foundations and Trends R in Computer Graphics and Vision Published, sold and distributed by: now Publishers Inc. PO Box 1024 Hanover, MA 02339 United States Tel. +1-781-985-4510 www.nowpublishers.com [email protected] Outside North America: now Publishers Inc. -

Cognitive Modeling, Symbolic
Cognitive modeling, symbolic Lewis, R.L. (1999). Cognitive modeling, symbolic. In Wilson, R. and Keil, F. (eds.), The MIT Encyclopedia of the Cognitive Sciences. Cambridge, MA: MIT Press. Symbolic cognitive models are theories of human cognition that take the form of working computer programs. A cognitive model is intended to be an explanation of how some aspect of cognition is accomplished by a set of primitive computational processes. A model performs a specific cognitive task or class of tasks and produces behavior that constitutes a set of predictions that can be compared to data from human performance. Task domains that have received considerable attention include problem solving, language comprehension, memory tasks, and human-device interaction. The scientific questions cognitive modeling seeks to answer belong to cognitive psychology, and the computational techniques are often drawn from artificial intelligence. Cognitive modeling differs from other forms of theorizing in psychology in its focus on functionality and computational completeness. Cognitive modeling produces both a theory of human behavior on a task and a computational artifact that performs the task. The theoretical foundation of cognitive modeling is the idea that cognition is a kind of COMPUTATION (see also COMPUTATIONAL THEORY OF MIND). The claim is that what the mind does, in part, is perform cognitive tasks by computing. (The claim is not that the computer is a metaphor for the mind, or that the architectures of modern digital computers can give us insights into human mental architecture.) If this is the case, then it must be possible to explain cognition as a dynamic unfolding of computational processes. -

Connectionist Models of Cognition Michael S. C. Thomas and James L
Connectionist models of cognition Michael S. C. Thomas and James L. McClelland 1 1. Introduction In this chapter, we review computer models of cognition that have focused on the use of neural networks. These architectures were inspired by research into how computation works in the brain and subsequent work has produced models of cognition with a distinctive flavor. Processing is characterized by patterns of activation across simple processing units connected together into complex networks. Knowledge is stored in the strength of the connections between units. It is for this reason that this approach to understanding cognition has gained the name of connectionism. 2. Background Over the last twenty years, connectionist modeling has formed an influential approach to the computational study of cognition. It is distinguished by its appeal to principles of neural computation to inspire the primitives that are included in its cognitive level models. Also known as artificial neural network (ANN) or parallel distributed processing (PDP) models, connectionism has been applied to a diverse range of cognitive abilities, including models of memory, attention, perception, action, language, concept formation, and reasoning (see, e.g., Houghton, 2005). While many of these models seek to capture adult function, connectionism places an emphasis on learning internal representations. This has led to an increasing focus on developmental phenomena and the origins of knowledge. Although, at its heart, connectionism comprises a set of computational formalisms,