Experimental Evaluation and Modeling of RF Modems for Use In
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

I.L. 40-614A 1 1. INTRODUCTION the Basic Interface to Remote Terminal, Or BIRT, Is an INCOM Network Master. BIRT Gives Users An
I.L. 40-614A 1. INTRODUCTION 3. DESCRIPTION The Basic Interface to Remote Terminal, or BIRT, is 3.1. Power Requirements an INCOM Network Master. BIRT gives users an economical way of getting information from their Range: 48 Vdc to 250 Vdc and 120 Vac INCOM-compatible devices since it connects directly between a user’s external MODEM or personal com- Burden: 3.5 W @ 48 Vdc puter and the INCOM network. 9 W @ 250 Vdc 5 W @ 120 Vac BIRT can directly replace Westinghouse MINTs, talk- ing to all INCOM-based communication devices. 3.2. Temperature Range BIRTs also include a special high-speed mode for communicating with SADIs – allowing users to collect For Operation: 0˚ to +55˚ C data from other manufacturer’s relays more rapidly For Storage: -20˚ to +80˚ C than ever before. 3.3. Physical Dimensions BIRTs are built to handle the abuse of substation environment; their “hardened” RS-232 serial port can The BIRT enclosure dimensions are identical to the handle surges and sustained high voltages that ERNI and SADI, as shown in figure 1. would destroy ordinary serial ports, and BIRTs can run on a wide range of voltages, from 48 to 250 Vdc Dimensions and weight of chassis or even 120 Vac, with no jumpers or adjustments needed. Height: 5.26” (133.6) mm) Width: 3.32” (84.3) mm) Depth: 5.92” (150.4) mm) 2. FEATURES Weight: 2.0 lbs (0.9 kg) BIRT is designed to be very flexible in its RS-232 External Wiring: See figures 2 and 3. -

MVI69E-LDM Datasheet
DATASHEET MVI69E-LDM Linux Development Module for CompactLogix™ The MVI69E-LDM module allows users to develop and deploy C/C++ custom algorithm applications for CompactLogix™ systems. Users are also able to create drivers for specialty Ethernet and Serial end-devices. The Linux Development module comes with a built-in API for backplane communications to the processor. With the separate development kit DVD, you are the developer who controls exactly what this module can and cannot do. Features Ideal for custom algorithm applications One independent Ethernet port, and two independent, isolated, serial ports (RS232/422/485) Industrial fan-less design Built-in API included for backplane communications to the processor Linux Virtual Machine (VM) and development environment provided on our website VM contains preinstalled toolchain and libraries VM contains the popular Eclipse IDE Ethernet & multi-serial port example applications provided on VM CPU, Memory and OS Specifications Specification Description CPU 400MHz ARM9 G20 Operating System Linux (kernel 2.6.33.7) Linux Distribution TimeSys System Memory 64MB SDRAM Flash Memory 256MB NAND Flash General Hardware Specifications Additional Products Specification Description ProSoft Technology® offers a full Backplane Current Load 500 mA @ 5 Vdc complement of hardware and 3 mA @ 24 Vdc software solutions for a wide variety Operating Temperature 0°C to 60°C (32°F to 140°F) of industrial communication Storage Temperature -40°C to 85°C (-40°F to 185°F) platforms. For a complete list of Shock 15g operational -
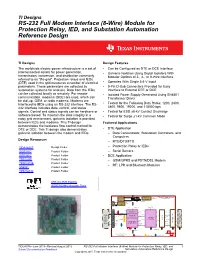
RS-232 Full Modem Interface (8-Wire) Module for Protection Relay, IED, and Substation Automation Reference Design
TI Designs RS-232 Full Modem Interface (8-Wire) Module for Protection Relay, IED, and Substation Automation Reference Design TI Designs Design Features The worldwide electric-power infrastructure is a set of • Can be Configured as DTE or DCE Interface interconnected assets for power generation, • Galvanic Isolation Using Digital Isolators With transmission, conversion, and distribution commonly Modular Options of 2-, 4-, or 8-Wire Interface referred to as "the grid". Protection relays and IEDs (DTE) used in the grid measures a number of electrical • Operates With Single 5.6-V Input parameters. These parameters are collected by • 9-Pin D-Sub Connectors Provided for Easy automation systems for analysis. Data from the IEDs Interface to External DTE or DCE can be collected locally or remotely. For remote • Isolated Power Supply Generated Using SN6501 communication, modems (DCE) are used, which can Transformer Driver be dial-up, GSM, or radio modems. Modems are interfaced to IEDs using an RS-232 interface. The RS- • Tested for the Following Data Rates: 1200, 2400, 232 interface includes data, control, and status 4800, 9600, 19200, and 115000 bps signals. Control and status signals can be hardware or • Tested for ESD ±8-kV Contact Discharge software based. To maintain the data integrity in a • Tested for Surge ±1-kV Common Mode noisy grid environment, galvanic isolation is provided between IEDs and modems. This TI design Featured Applications demonstrates the hardware flow control method for DTE or DCE. This TI design also demonstrates • DTE -

Lab #1 Serial Communication (2 Sessions)
MAE 493G/CpE 493M Mobile Robotics, © Yu Gu, Interactive Robotics Laboratory Fall 2013 LAB #1 SERIAL COMMUNICATION (2 SESSIONS) OBJECTIVE Learn about how to solder a null modem cable; Learn about the basic serial communication protocol; Learn how to send and receive serial communication packets from MATLAB; Practice MATLAB programing. INTRODUCTION I. Serial Communication Please reference the class handout on serial communication. For a DB9 connector commonly used for RS-232 standards, the definition of each pin is explained in Figure 1. Fig.1. DB9 Connector for RS232 Serial Communication II. Null Modem Cable To connect two computers using a RS232 serial connection, a null modem cable will be needed. There are several ways to make a null modem cable. If hand shaking is needed, follow Figure 2; and if hand shaking is not needed, follow Figure 3. Fig.2. Null Modem Cable with Hand Shaking Page 1 of 4 MAE 493G/CpE 493M Mobile Robotics, © Yu Gu, Interactive Robotics Laboratory Fall 2013 Fig.3. Null Modem Cable without Hand Shaking III. Soldering If you don’t already have experience with soldering, watch this video first: https://www.youtube.com/watch?v=I_NU2ruzyc4 IV. USB to Serial Adapter Since most of the modern computers do not have RS232 ports anymore, you will sometime need to use a USB to serial adapter to create new serial ports. The one we are using for this class is made by Micro Connectors Inc. It actually converts one USB port to two RS232 serial ports. Once properly installed, the serial port will show up as ‘COM 1’ and ‘COM 2’, or other numbers: ‘COM N’ and ‘COM N+1’. -

Type RS-232 Adapter
Plug and Play Model 33 Tele- type RS-232 Adapter This plug and play adapter makes it simple to con- nect a Model 33 Teletype to an RS-232 serial port on computer. The adapter converts the 20ma cur- rent loop interface of the Teletype to/from RS-232 levels and obtains the power it requires for opera- tion directly from the teletype. An RJ-14 modular jack and standard flat phone wire (4 or 6 conduc- tor) are used for connection to the Teletype. On the computer side, modular DB-25 and DB-9 connect- ors are readily available and easy to configure as DCE or DTE as required. Adapter Installation • This adapter is designed for connection to a UCC-6 Call Control Unit. It is not compatible with Teletypes configured with a Telex Call Control Unit. • Disconnect the Teletype from power (unplug AC cord or turn off power strip). Note that even if the Line/Local knob is in the OFF position, the 48vac power supply on the UCC-6 is still powered. • Plug the adapter onto the P2 connector as shown. • Connect the phone cable into the modular jack (use 4 or 6 conductor phone cable). DB-25 and DB-9 Wiring Modular DB-x connectors make it easy to connect your Teletype to computers with different interface require- ments because you can easily swap between DB-x con- nectors at the computer end of the phone cable. Custom wiring of the DB-x connector requires no soldering – just push the pre-wired pins into the DB-x positions your appli- cation requires. -

Kernel Debug for Microsoft® Windows® Server 2003 on HP Integrity Servers
Kernel Debug for Microsoft® Windows® Server 2003 on HP Integrity Servers May 2004 (First Edition) Part Number 368341-001 © 2004 Hewlett-Packard Development Company, L.P. Hewlett-Packard Company shall not be liable for technical or editorial errors or omissions contained herein. The information in this document is provided “as is” without warranty of any kind and is subject to change without notice. The warranties for HP products are set forth in the express limited warranty statements accompanying such products. Nothing herein should be construed as constituting an additional warranty. Confidential computer software. Valid license from HP required for possession, use or copying. Consistent with FAR 12.211 and 12.212, Commercial Computer Software, Computer Software Documentation, and Technical Data for Commercial Items are licensed to the U.S. Government under vendor's standard commercial license. Kernel Debug for Microsoft® Windows® Server 2003 on HP Integrity Servers May 2004 (First Edition) Part Number 368341-001 Contents Introduction......................................................................................................................... 5 Supported Servers ............................................................................................................. 5 Who Should Use the Microsoft Windows OS Kernel Debugger ..................................... 5 Setting up the Windows OS Kernel Debug Environment................................................ 5 Hardware Requirements............................................................................................................................... -

Application Note Basic Instructions to Communicate with TESLA
Application Note Basic Instructions to Communicate with TESLA Compatibility • TESLA model: 4000 ! • Firmware version: 2.1 • TCP version: 3.1 Contents TESLA Communication Options and Ports ............................................................................................................. 2 Ports .................................................................................................................................................................... 4 Front ............................................................................................................................................................... 4 Rear ................................................................................................................................................................ 5 Setting up Computer for TESLA Communication.................................................................................................... 6 Installing TESLA Control Panel (TCP) ................................................................................................................ 6 Installing and Configuring ERLPhase USB Driver .............................................................................................. 6 Configuring Null Modem Drive ............................................................................................................................ 9 Cyber Security - Role Based Access Control (RBAC) .......................................................................................... 15 Roles Summary................................................................................................................................................ -

Remote Microsoft® Windows Server® OS Kernel Debugging Using Dell
Remote Microsoft® Windows Server® OS Kernel Debugging Using Dell Windows Debugger Utility (DWDU) Dell │ Product Group Niranjan Vedavyas March 2, 2010 Remote Microsoft® Windows Server® OS Kernel Debugging Using DWDU THIS WHITE PAPER IS FOR INFORMATIONAL PURPOSES ONLY, AND MAY CONTAIN TYPOGRAPHICAL ERRORS AND TECHNICAL INACCURACIES. THE CONTENT IS PROVIDED AS IS, WITHOUT EXPRESS OR IMPLIED WARRANTIES OF ANY KIND. © 2010 Dell Inc. All rights reserved. Reproduction of this material in any manner whatsoever without the express written permission of Dell Inc. is strictly forbidden. For more information, contact Dell. Dell, the DELL logo, and the DELL badge, are trademarks of Dell Inc. Microsoft, Windows, and Windows Server are either trademarks or registered trademarks of Microsoft Corporation in the United States and/or other countries. Page ii Remote Microsoft® Windows Server® OS Kernel Debugging Using DWDU Table of Contents Executive Summary .................................................................................................... 2 Introduction ............................................................................................................. 3 Overview ................................................................................................................. 3 Server Configuration ................................................................................................... 3 Client Configuration .................................................................................................... 6 Conclusion -

1 Port FTDI USB to RS232 Null Modem Adapter
1 Port FTDI USB to RS232 Null Modem Adapter ICUSB232FTN *actual product may vary from photos DE: Bedienungsanleitung - de.startech.com FR: Guide de l'utilisateur - fr.startech.com ES: Guía del usuario - es.startech.com IT: Guida per l'uso - it.startech.com NL: Gebruiksaanwijzing - nl.startech.com PT: Guia do usuário - pt.startech.com For the most up-to-date information, please visit: www.startech.com Manual Revision: 02/21/2012 FCC Compliance Statement This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures: • Reorient or relocate the receiving antenna. • Increase the separation between the equipment and receiver. • Connect the equipment into an outlet on a circuit different from that to which the receiver is connected. • Consult the dealer or an experienced radio/TV technician for help. Use of Trademarks, Registered Trademarks, and other Protected Names and Symbols This manual may make reference to trademarks, registered trademarks, and other protected names and/or symbols of third-party companies not related in any way to StarTech.com. -

1200 S / 1200 P
1200 S / 1200 P deutsch / englisch Introduction Thank you very much for purchasing the IOBlix . Developing the IOBlix (say: I-O-B-lix) we put much value to high compatibility. Being an interface card the IOBlix is the connection between the Amiga and the peripheral devices. This means - High compatibility with all peripheral devices - High compatibility with all common software that uses the ports When using the IOBlix please remember that there are programms which address the ports low level to use the special feature of the internal Amiga ports. Programms like this are non system conform and cannot operate with the IOBlix. If you have any further questions which are not explained in this manual or in the manuals on the install disk feel free to contact our service hotline: Mo.-Do. 5.00-6.00 p.m. at +49 5651 8097 21. Software Updates for the IOBlix will be available on our web site at http://www.rbm.de. Our E-Mail is [email protected]. Electromagnetic compatibility (EMC) / CE Electromagnetic compatibility is supposed to guarantee the „compatibility“ of different electronic devices. This means that your computer must not interfere with your neighbours radio. Transferring your Amiga into a tower case is not clearly defined according to the EMC. For example older ZorroII-Cards do not have the CE-sign so they were never checked for EMC. Anyway does the combination of products with a CE-sign not imply the EMC of the whole product. We emphasize that rebuilding your Computer into a new case and adding any components, you become the manufacturer/producer of this system under the law of EMC. -

The RS232 Standard
The RS232 Standard Information being transferred between Interfaces Selecting a Cable data processing equipment and In addition to communications between The major consideration in choosing an peripherals is in the form of digital data computer equipment over telephone RS232 cable is, what devices are to be which is transmitted in either a serial lines, RS232 is now widely used for connected? First, are you connecting or parallel mode. Parallel direct connections between data two DTE devices (null modem cable) or communications are used mainly for acquisition devices and computer a DTE device to a DCE device (modem connections between test instruments systems. As in the definition of RS232, cable)? Second, what connectors are or computers and printers, while serial the computer is data transmission required on each end, male or female, is often used between computers and equipment (DTE). However, many 25-pin or 9-pin (AT style)? Usually, it is other peripherals. Serial transmission interface products are not data recommended that the user obtain the involves the sending of data one bit at a communications equipment (DCE). Null two devices to be connected, and then time, over a single communications line. modem cables are designed for this determine which cable is required. In contrast, parallel communications situation; rather than having the pin- to- require at least as many lines as there pin connections of modem cables, null RS232 Specifications are bits in a word being transmitted (for modem cables have different internal TRANSMITTED SIGNAL an 8-bit word, a minimum of 8 lines are wiring to allow DTE devices to VOLTAGE LEVELS: Z needed). -

Adventures with an A500
Fort Worth Dallas key for “:” I get some weird So I would like to see, out of fun, Adventures character. I have to actually hold what it would take to bring a 500 down ALT, SHIFT, then “:” to up to par with 1200. Naturally the get the “:” character. 1200 is built for what it does July 2014 July With An A500 from the ground up, and the June 6, 2014 And for some reason, while my motherboard of the 500 is an After doing some more tinkering I other keys are alright, my z and y older design, but then I don’t did make my objective of making are switched. Weird stuff. need the 500 to do everything the a disk image that would self boot 1200 does. and have a term program on it. But I wanted to let all know I made some progress with the Though I have considered just Basically did what Johnny would Amiga 500. putting the internals of a 1200 in eventually advise me to do by the 500 case and being done with taking a copy of the 1.3 In my messages with people from it. Workbench disk (bear in mind I’m the club and those offering help working with images, not actual (thanks Howard and Johnny and Just kidding of course. disks, which is nice) and I deleted others) I was given a message ALL the utilities. Then I copied asking why I don't pick up a better June 11, 2014 over A-Term, which is a simple Amiga.