Clustering in Pursuit of Temporal Correlation for Human Motion Segmentation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Produzent Adresse Land Allplast Bangladesh Ltd
Zeitraum - Produzenten mit einem Liefertermin zwischen 01.01.2020 und 31.12.2020 Produzent Adresse Land Allplast Bangladesh Ltd. Mulgaon, Kaliganj, Gazipur, Rfl Industrial Park Rip, Mulgaon, Sandanpara, Kaligonj, Gazipur, Dhaka Bangladesh Bengal Plastics Ltd. (Unit - 3) Yearpur, Zirabo Bazar, Savar, Dhaka Bangladesh Durable Plastic Ltd. Mulgaon, Kaligonj, Gazipur, Dhaka Bangladesh HKD International (Cepz) Ltd. Plot # 49-52, Sector # 8, Cepz, Chittagong Bangladesh Lhotse (Bd) Ltd. Plot No. 60 & 61, Sector -3, Karnaphuli Export Processing Zone, North Potenga, Chittagong Bangladesh Plastoflex Doo Branilaca Grada Bb, Gračanica, Federacija Bosne I H Bosnia-Herz. ASF Sporting Goods Co., Ltd. Km 38.5, National Road No. 3, Thlork Village, Chonrok Commune, Konrrg Pisey, Kampong Spueu Cambodia Powerjet Home Product (Cambodia) Co., Ltd. Manhattan (Svay Rieng) Special Economic Zone, National Road 1, Sangkat Bavet, Krong Bavet, Svaay Rieng Cambodia AJS Electronics Ltd. 1st Floor, No. 3 Road 4, Dawei, Xinqiao, Xinqiao Community, Xinqiao Street, Baoan District, Shenzhen, Guangdong China AP Group (China) Co., Ltd. Ap Industry Garden, Quetang East District, Jinjiang, Fujian China Ability Technology (Dong Guan) Co., Ltd. Songbai Road East, Huanan Industrial Area, Liaobu Town, Donggguan, Guangdong China Anhui Goldmen Industry & Trading Co., Ltd. A-14, Zongyang Industrial Park, Tongling, Anhui China Aold Electronic Ltd. Near The Dahou Viaduct, Tianxin Industrial District, Dahou Village, Xiegang Town, Dongguan, Guangdong China Aurolite Electrical (Panyu Guangzhou) Ltd. Jinsheng Road No. 1, Jinhu Industrial Zone, Hualong, Panyu District, Guangzhou, Guangdong China Avita (Wujiang) Co., Ltd. No. 858, Jiaotong Road, Wujiang Economic Development Zone, Suzhou, Jiangsu China Bada Mechanical & Electrical Co., Ltd. No. 8 Yumeng Road, Ruian Economic Development Zone, Ruian, Zhejiang China Betec Group Ltd. -
![Directors, Senior Management and Parties Involved in the [Redacted]](https://docslib.b-cdn.net/cover/0116/directors-senior-management-and-parties-involved-in-the-redacted-350116.webp)
Directors, Senior Management and Parties Involved in the [Redacted]
THIS DOCUMENT IS IN DRAFT FORM, INCOMPLETE AND SUBJECT TO CHANGE AND THAT THE INFORMATION MUST BE READ IN CONJUNCTION WITH THE SECTION HEADED “WARNING” ON THE COVER OF THIS DOCUMENT DIRECTORS, SENIOR MANAGEMENT AND PARTIES INVOLVED IN THE [REDACTED] DIRECTORS AND SENIOR MANAGEMENT Name Residential Address Nationality Executive Directors Mr. Mei Zefeng No. 76, Huxin Dao Chinese (梅澤鋒先生) Shimao Xiangbinhu Taihu East Road Xinbei District Changzhou City Jiangsu Province the PRC Ms. Liu Ping No. 76, Huxin Dao The Federation of (劉萍女士) Shimao Xiangbinhu Saint Kitts and Taihu East Road Nevis Xinbei District Changzhou City Jiangsu Province the PRC Mr. Zhang Zhihong Wenlongyuan Chinese (張志洪先生) Hengshanqiao Town Wujin District Changzhou City Jiangsu Province the PRC Ms. Lu Xiaoyu No. 86, Meijia Village Chinese (陸小玉女士) Wuyi Village, Hengshanqiao Town Wujin District Changzhou City Jiangsu Province the PRC Mr. Xu Chao No. 46, Xujiatang County Chinese (許潮先生) Qinxincunwei Yaoguan Town Wujin District Changzhou City Jiangsu Province the PRC –67– THIS DOCUMENT IS IN DRAFT FORM, INCOMPLETE AND SUBJECT TO CHANGE AND THAT THE INFORMATION MUST BE READ IN CONJUNCTION WITH THE SECTION HEADED “WARNING” ON THE COVER OF THIS DOCUMENT DIRECTORS, SENIOR MANAGEMENT AND PARTIES INVOLVED IN THE [REDACTED] Name Residential Address Nationality Independent non-executive Directors Mr. Li Yuen Fai Roger Flat C 3/F Pak Hoi Mansion Chinese (李苑輝先生) Taikoo Shing Quarry Bay Hong Kong Mr. Cao Baozhong Chegongzhuang Street Chinese (曹寶忠先生) West City District Beijing City the PRC Mr. Yang Guang No. 33 Baoshan No. 8 Town Chinese (楊廣先生) Baoshan District Shanghai City the PRC Senior Management Mr. -

Investigation Report on Influencing Factors of Consumers' Purchasing Behavior of New Energy Vehicles in Changzhou,China
Advances in Economics, Business and Management Research, volume 67 International Conference on Economics, Business, Management and Corporate Social Responsibility (EBMCSR 2018) Investigation Report on Influencing Factors of Consumers' Purchasing Behavior of New Energy Vehicles in Changzhou,China Qing-ming WEI1, a , Zi-xuan ZHANG2,b , Yu-xin XIA3,c,* 1School of Business Administration, HOHAI University, Changzhou Jiangsu, 213022,China 2School of Business Administration, HOHAI University, Changzhou Jiangsu, 213022,China 3School of Business Administration, HOHAI University, Changzhou Jiangsu, 213022,China [email protected], [email protected], [email protected] *Yu-xin XIA Key words: new energy vehicle consumption behavior decision making factor analysis. Abstract. In this paper, the survey survey survey, research analysis and results, research conclusions and suggestions to discuss, a comprehensive analysis of the current consumer behavior to buy new energy vehicles factors, and finally according to the results of statistical analysis of data, for related enterprises to establish a development prospects, in line with consumer demand for products issued The direction of the exhibition. This paper argues that charging time, driving mileage, environmental impact, professional guidance and appearance and interior decoration are important factors affecting consumers' purchase of new energy vehicles, which shows that the convenience, driving ability, appearance and interior decoration and consumption orientation of new energy vehicles are still a major driving force for consumers to choose new energy vehicles. 1. Introduction Transportation industry is the second largest carbon emission industry in the world, and its carbon emissions exceed one fifth of the world's total carbon emissions. Therefore, it is the general trend to realize the transformation of vehicle energy and power system under the background of sustainable development. -

Schedules of Assets and Liabilities for Garrett Motion Japan Inc
20-12212-mew Doc 619 Filed 12/18/20 Entered 12/18/20 22:04:45 Main Document Pg 1 of 107 UNITED STATES BANKRUPTCY COURT Southern District of New York ) In re ) Chapter 11 ) Garrett Motion Inc., et al., ) Case No 20-12212 Debtors. ) (Jointly Administered) ) SCHEDULES OF ASSETS AND LIABILITIES FOR Garrett Motion Japan Inc. Case No: 20-12231 20-12212-mew Doc 619 Filed 12/18/20 Entered 12/18/20 22:04:45 Main Document Pg 2 of 107 UNITED STATES BANKRUPTCY COURT SOUTHERN DISTRICT OF NEW YORK Garrett Motion Japan Inc. Case Number:20-12231 GLOBAL NOTES AND STATEMENT OF LIMITATIONS, METHODOLOGY, AND DISCLAIMER REGARDING DEBTOR'S SCHEDULES AND STATEMENTS GLOBAL NOTES On November 4, 2020, Garrett Motion Inc. ("GMI") and its affiliated debtors Garrett Motion Holdings Inc., Garrett ASASCO Inc. and Garrett Motion Holdings II Inc. (collectively, the "Initial Reporting Debtors") filed their Schedules of Assets and Liabilities and Statements of Financial Affairs. The Schedules of Assets and Liabilities (collectively, the "Schedules") and the Statements of Financial Affairs (collectively, the "Statements" and, together with the Schedules, the "Schedules and Statements") filed by the remaining thirty-three debtor affiliates (each, an "Additional Reporting Debtor") the Initial Reporting Debtors in these jointly administered chapter 11 cases (the "Chapter 11 Cases") in the United States Bankruptcy Court for the Southern District of New York (the "Bankruptcy Court") have been prepared pursuant to section 521 of title 11 of the United States Code, 11 U.S.C. §§ 101-1532 (the "Bankruptcy Code") and rule 1007 of the Federal Rules of Bankruptcy Procedure by management of the Additional Reporting Debtors with the assistance of their court-appointed advisors and are unaudited. -

A Developed Framework for the Multi-District Ecological Compensation Standards Integrating Ecosystem Service Zoning in an Urban Area in China
sustainability Article A Developed Framework for the Multi-District Ecological Compensation Standards Integrating Ecosystem Service Zoning in an Urban Area in China Jia He 1,2, Yu Wan 3, Zhonglin Tang 1,2, Xiaodong Zhu 4,* and Chuanhao Wen 5,* 1 National Research Center for Upper Yangtze Economy, Chongqing Technology and Business University, Chongqing 400067, China 2 School of Economics, Chongqing Technology and Business University, Chongqing 400067, China 3 School of River and Ocean Engineering, Chongqing Jiaotong University, Chongqing 400074, China 4 State Key Laboratory of Pollution Control and Resource Reuse, School of the Environment, Nanjing University, Nanjing 210023, China 5 School of Economics, Yunnan University, Yunnan 650500, China * Correspondence: [email protected] (X.Z.); [email protected] (C.W.); Tel.: +86-138-0903-8178 (X.Z.); +86-185-0234-0601 (C.W.) Received: 26 June 2019; Accepted: 3 September 2019; Published: 6 September 2019 Abstract: Ecological compensation is an effective means to adjust relationships among stakeholders in order to conserve and/or sustainably use ecosystem services. The current ecological compensation standards (ECS) do not well reflect the differences in ecological, social, and economic development. Thus, we took a typical urbanization area (the Suzhou–Wuxi–Changzhou region) in China as an example, because of its prominent contradiction between rapid socio-economic development and fragile ecosystem. Combined with the ecological, economic, and social conditions, the methods of ecosystem service value (ESV) evaluation, cluster analysis, and scenario analysis were used to propose an optimized spatial zoning method and optimal development scenario. Then, the ECS by different zones were determined by using ESV assessment, cost-benefit analysis, and contingent valuation method. -

Barcode:3844251-01 A-570-112 INV - Investigation
Barcode:3844251-01 A-570-112 INV - Investigation - PRODUCERS AND EXPORTERS FROM THE PRC Producer/Exporter Name Mailing Address A-Jax International Co., Ltd. 43th Fei Yue Road, Zhongshan City, Guandong Province, China Anhui Amigo Imp.&Exp. Co., Ltd. Private Economic Zone, Chaohu, 238000, Anhui, China Anhui Sunshine Stationery Co., Ltd. 17th Floor, Anhui International Business Center, 162, Jinzhai Road, Hefei, Anhui, China Anping Ying Hang Yuan Metal Wire Mesh Co., Ltd. No. 268 of Xutuan Industry District of Anping County, Hebei Province, 053600, China APEX MFG. CO., LTD. 68, Kuang-Chen Road, Tali District, Taichung City, 41278, Taiwan Beijing Kang Jie Kong 9-2 Nanfaxin Sector, Shunping Rd, Shunyi District, Beijing, 101316, China Changzhou Kya Fasteners Co., Ltd. Room 606, 3rd Building, Rongsheng Manhattan Piaza, Hengshan Road, Xinbei District, Changzhou City, Jiangsu, China Changzhou Kya Trading Co., Ltd. Room 606, 3rd Building, Rongsheng Manhattan Piaza, Hengshan Road, Xinbei District, Changzhou City, Jiangsu, China China Staple #8 Shu Hai Dao, New District, Economic Development Zone, Jinghai, Tianjin Chongqing Lishun Fujie Trading Co., Ltd. 2-63, G Zone, Perpetual Motor Market, No. 96, Torch Avenue, Erlang Technology New City, Jiulongpo District, Chongqing, China Chongqing Liyufujie Trading Co., Ltd. No. 2-63, Electrical Market, Torch Road, Jiulongpo District, Chongqing 400000, China Dongyang Nail Manufacturer Co.,Ltd. Floor-2, Jiaotong Building, Ruian, Wenzhou, Zhejiang, China Fastco (Shanghai) Trading Co., Ltd. Tong Da Chuang Ye, Tian -

03032021 Nonfood Produzenten.Xlsx
Zeitraum - Produzenten mit einem Liefertermin zwischen 01.01.2020 und 31.12.2020 Produzent Adresse Land Allplast Bangladesh Ltd. Mulgaon, Kaliganj, Gazipur, Rfl Industrial Park Rip, Mulgaon, Sandanpara, Kaligonj, Gazipur, Dhaka Bangladesh Bengal Plastics Ltd. (Unit - 3) Yearpur, Zirabo Bazar, Savar, Dhaka Bangladesh Durable Plastic Ltd. Mulgaon, Kaligonj, Gazipur, Dhaka Bangladesh HKD International (Cepz) Ltd. Plot # 49-52, Sector # 8, Cepz, Chittagong Bangladesh Lhotse (Bd) Ltd. Plot No. 60 & 61, Sector -3, Karnaphuli Export Processing Zone, North Potenga, Chittagong Bangladesh Plastoflex Doo Branilaca Grada Bb, Gračanica, Federacija Bosne I H Bosnia-Herz. ASF Sporting Goods Co., Ltd. Km 38.5, National Road No. 3, Thlork Village, Chonrok Commune, Konrrg Pisey, Kampong Spueu Cambodia Powerjet Home Product (Cambodia) Co., Ltd. Manhattan (Svay Rieng) Special Economic Zone, National Road 1, Sangkat Bavet, Krong Bavet, Svaay Rieng Cambodia AJS Electronics Ltd. 1st Floor, No. 3 Road 4, Dawei, Xinqiao, Xinqiao Community, Xinqiao Street, Baoan District, Shenzhen, Guangdong China AP Group (China) Co., Ltd. Ap Industry Garden, Quetang East District, Jinjiang, Fujian China Ability Technology (Dong Guan) Co., Ltd. Songbai Road East, Huanan Industrial Area, Liaobu Town, Donggguan, Guangdong China Anhui Goldmen Industry & Trading Co., Ltd. A-14, Zongyang Industrial Park, Tongling, Anhui China Aold Electronic Ltd. Near The Dahou Viaduct, Tianxin Industrial District, Dahou Village, Xiegang Town, Dongguan, Guangdong China Aurolite Electrical (Panyu Guangzhou) Ltd. Jinsheng Road No. 1, Jinhu Industrial Zone, Hualong, Panyu District, Guangzhou, Guangdong China Avita (Wujiang) Co., Ltd. No. 858, Jiaotong Road, Wujiang Economic Development Zone, Suzhou, Jiangsu China Bada Mechanical & Electrical Co., Ltd. No. 8 Yumeng Road, Ruian Economic Development Zone, Ruian, Zhejiang China Betec Group Ltd. -
Factory Address Country
Factory Address Country Durable Plastic Ltd. Mulgaon, Kaligonj, Gazipur, Dhaka Bangladesh Lhotse (BD) Ltd. Plot No. 60&61, Sector -3, Karnaphuli Export Processing Zone, North Potenga, Chittagong Bangladesh Bengal Plastics Ltd. Yearpur, Zirabo Bazar, Savar, Dhaka Bangladesh ASF Sporting Goods Co., Ltd. Km 38.5, National Road No. 3, Thlork Village, Chonrok Commune, Korng Pisey District, Konrrg Pisey, Kampong Speu Cambodia Ningbo Zhongyuan Alljoy Fishing Tackle Co., Ltd. No. 416 Binhai Road, Hangzhou Bay New Zone, Ningbo, Zhejiang China Ningbo Energy Power Tools Co., Ltd. No. 50 Dongbei Road, Dongqiao Industrial Zone, Haishu District, Ningbo, Zhejiang China Junhe Pumps Holding Co., Ltd. Wanzhong Villiage, Jishigang Town, Haishu District, Ningbo, Zhejiang China Skybest Electric Appliance (Suzhou) Co., Ltd. No. 18 Hua Hong Street, Suzhou Industrial Park, Suzhou, Jiangsu China Zhejiang Safun Industrial Co., Ltd. No. 7 Mingyuannan Road, Economic Development Zone, Yongkang, Zhejiang China Zhejiang Dingxin Arts&Crafts Co., Ltd. No. 21 Linxian Road, Baishuiyang Town, Linhai, Zhejiang China Zhejiang Natural Outdoor Goods Inc. Xiacao Village, Pingqiao Town, Tiantai County, Taizhou, Zhejiang China Guangdong Xinbao Electrical Appliances Holdings Co., Ltd. South Zhenghe Road, Leliu Town, Shunde District, Foshan, Guangdong China Yangzhou Juli Sports Articles Co., Ltd. Fudong Village, Xiaoji Town, Jiangdu District, Yangzhou, Jiangsu China Eyarn Lighting Ltd. Yaying Gang, Shixi Village, Shishan Town, Nanhai District, Foshan, Guangdong China Lipan Gift & Lighting Co., Ltd. No. 2 Guliao Road 3, Science Industrial Zone, Tangxia Town, Dongguan, Guangdong China Zhan Jiang Kang Nian Rubber Product Co., Ltd. No. 85 Middle Shen Chuan Road, Zhanjiang, Guangdong China Ansen Electronics Co. Ning Tau Administrative District, Qiao Tau Zhen, Dongguan, Guangdong China Changshu Tongrun Auto Accessory Co., Ltd. -

Transmissibility of Hand, Foot, and Mouth Disease in 97 Counties of Jiangsu Province, China, 2015- 2020
Transmissibility of Hand, Foot, and Mouth Disease in 97 Counties of Jiangsu Province, China, 2015- 2020 Wei Zhang Xiamen University Jia Rui Xiamen University Xiaoqing Cheng Jiangsu Provincial Center for Disease Control and Prevention Bin Deng Xiamen University Hesong Zhang Xiamen University Lijing Huang Xiamen University Lexin Zhang Xiamen University Simiao Zuo Xiamen University Junru Li Xiamen University XingCheng Huang Xiamen University Yanhua Su Xiamen University Benhua Zhao Xiamen University Yan Niu Chinese Center for Disease Control and Prevention, Beijing City, People’s Republic of China Hongwei Li Xiamen University Jian-li Hu Jiangsu Provincial Center for Disease Control and Prevention Tianmu Chen ( [email protected] ) Page 1/30 Xiamen University Research Article Keywords: Hand foot mouth disease, Jiangsu Province, model, transmissibility, effective reproduction number Posted Date: July 30th, 2021 DOI: https://doi.org/10.21203/rs.3.rs-752604/v1 License: This work is licensed under a Creative Commons Attribution 4.0 International License. Read Full License Page 2/30 Abstract Background: Hand, foot, and mouth disease (HFMD) has been a serious disease burden in the Asia Pacic region represented by China, and the transmission characteristics of HFMD in regions haven’t been clear. This study calculated the transmissibility of HFMD at county levels in Jiangsu Province, China, analyzed the differences of transmissibility and explored the reasons. Methods: We built susceptible-exposed-infectious-asymptomatic-removed (SEIAR) model for seasonal characteristics of HFMD, estimated effective reproduction number (Reff) by tting the incidence of HFMD in 97 counties of Jiangsu Province from 2015 to 2020, compared incidence rate and transmissibility in different counties by non -parametric test, rapid cluster analysis and rank-sum ratio. -

Levi Strauss & Co. Factory List
Levi Strauss & Co. Factory List Published : March 2016 Country Factory name Alternative factory name Address City State/Province Argentina Accecuer SA Juan Zanella 4656 Caseros Buenos Aires Avanti S.A. Coronel Suarez 1544 Olavarría Buenos Aires Best Sox S.A. Charlone 1446 Capital Federal Buenos Aires Buffalo S.R.L. Valentín Vergara 4633 Florida Oeste Buenos Aires Carlos Kot San Carlos 1047 Wilde Buenos Aires Ciudad Autónoma de Buenos CBTex S.R.L. - Sew Av. de los Constituyentes 5938 Buenos Aires Aires Estex Argentina S.R.L. Superi, 3530 Caba Buenos Aires Frey S.A. Frey Lebensohn 311 Paso del Rey Buenos Aires Gitti SRL Italia 4043 Mar del Plata Buenos Aires Industrias Seatle S.A. Bermudez 2830 CABA Buenos Aires Khamsin S.A. Florentino Ameghino, 1280 Vicente Lopez Buenos Aires Manufactura Arrecifes S.A. Ruta Nacional 8, Kilometro 178 Arrecifes Buenos Aires Materia Prima S.A. - Planta 2 Acasusso, 5170 Munro Buenos Aires Procesadora Serviconf SRL Gobernardor Ramon Castro 4765 Vicente Lopez Buenos Aires Procesadora Virasoro S.A. Boulevard Drago 798 Pergamino Buenos Aires Procesos y Diseños Virasoro S.A. Avenida Ovidio Lagos, 4650 Rosario Santa Fé Provira S.A. Avenida Bucar, 1018 Pergamino Buenos Aires Spring S.R.L. Darwin, 173 Capital Federal Buenos Aires Sweaters Romano SRL Av. Republica 877 Ciudadela Buenos Aires Top San Juan S.A. Calle General Acha 1122 San Juan San Juan Tricofix S.R.L. Miranda, 5475 Capital Federal Buenos Aires Underwear M&S, S.R.L Levalle 449 Avellaneda Buenos Aires Vira Offis S.A. Virasoro, 3570 Rosario Santa Fé Wittery S.A. -
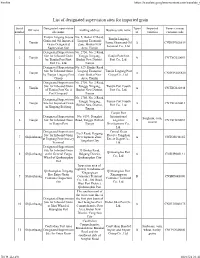
List of Designated Supervision Sites for Imported Grain
Firefox https://translate.googleusercontent.com/translate_f List of designated supervision sites for imported grain Serial Designated supervision Types Imported Venue (venue) Off zone mailing address Business unit name number site name of varieties customs code Tianjin Lingang Jiayue No. 5, Bohai 37 Road, Tianjin Lingang Grain and Oil Imported Lingang Economic 1 Tianjin Jiayue Grain and Oil A CNDGN02S619 Grain Designated Zone, Binhai New Terminal Co., Ltd. Supervision Site Area, Tianjin Designated Supervision No. 2750, No. 2 Road, Site for Inbound Grain Tanggu Xingang, Tianjin Port First 2 Tianjin A CNTXG020051 by Tianjin Port First Binhai New District, Port Co., Ltd. Port Co., Ltd. Tianjin Designated Supervision No. 529, Hunhe Road, Site for Inbound Grain Lingang Economic Tianjin Lingang Port 3 Tianjin A CNDGN02S620 by Tianjin Lingang Port Zone, Binhai New Group Co., Ltd. Group Area, Tianjin Designated Supervision No. 2750, No. 2 Road, Site for Inbound Grain Tanggu Xingang, Tianjin Port Fourth 4 Tianjin A CNTXG020448 of Tianjin Port No. 4 Binhai New District, Port Co., Ltd. Port Company Tianjin No. 2750, No. 2 Road, Designated Supervision Tanggu Xingang, Tianjin Port Fourth 5 Tianjin Site for Imported Grain A CNTXG020413 Binhai New District, Port Co., Ltd. in Xingang Beijiang Tianjin Tianjin Port Designated Supervision No. 6199, Donghai International Sorghum, corn, 6 Tianjin Site for Inbound Grain Road, Tanggu District, Logistics B CNTXG020051 sesame in Tianjin Port Tianjin Development Co., Ltd. Designated Supervision Central Grain No.9 Road, Haigang Site for Inbound Grain Reserve Tangshan 7 Shijiazhuang Development Zone, A CNTGS040165 at Jingtang Port Grocery Direct Depot Co., Tangshan City Terminal Ltd. -

Crouse-Hinds Series CEAG HLL Linear
EU Type Examination Certificate CML 17 ATEX 3305 X Issue 0 1 Equipment intended for use in Potentially Explosive Atmospheres Directive 2014/34/EU 2 Equipment HLL Series LED Explosion Protected Luminaire 3 Manufacturer Cooper Electric (Changzhou) Co., Ltd. 4 Address No.189 Liuyanghe Road, Xinbei District, Changzhou, 213031, Jiangsu , China 5 The equipment is specified in the description of this certificate and the documents to which it refers. 6 Certification Management Limited, Unit 1 Newport Business Park, New Port Road, Ellesmere Port CH65 4LZ, UK, Notified Body Number 2503, in accordance with Article 17 of Directive 2014/34/EU of the European Parliament and of the Council, dated 26 February 2014, certifies that this equipment has been found to comply with the Essential Health and Safety Requirements relating to the design and construction of equipment intended for use in potentially explosive atmospheres given in Annex II to the Directive. The examination and test results are recorded in the confidential reports listed in Section 12. 7 If an ‘X’ suffix appears after the certificate number, it indicates that the equipment is subject to conditions of safe use (affecting correct installation or safe use). These are specified in Section 14. 8 This EU Type Examination certificate relates only to the design and construction of the specified equipment or component. Further requirements of Directive 2014/34/EU Article 13 apply to the manufacture of the equipment or component and are separately certified. 9 Compliance with the Essential Health