Algorithms for the Optimization of Quantum Circuits
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Completeness of the ZX-Calculus
Completeness of the ZX-calculus Quanlong Wang Wolfson College University of Oxford A thesis submitted for the degree of Doctor of Philosophy Hilary 2018 Acknowledgements Firstly, I would like to express my sincere gratitude to my supervisor Bob Coecke for all his huge help, encouragement, discussions and comments. I can not imagine what my life would have been like without his great assistance. Great thanks to my colleague, co-auhor and friend Kang Feng Ng, for the valuable cooperation in research and his helpful suggestions in my daily life. My sincere thanks also goes to Amar Hadzihasanovic, who has kindly shared his idea and agreed to cooperate on writing a paper based one his results. Many thanks to Simon Perdrix, from whom I have learned a lot and received much help when I worked with him in Nancy, while still benefitting from this experience in Oxford. I would also like to thank Miriam Backens for loads of useful discussions, advertising for my talk in QPL and helping me on latex problems. Special thanks to Dan Marsden for his patience and generousness in answering my questions and giving suggestions. I would like to thank Xiaoning Bian for always being ready to help me solve problems in using latex and other softwares. I also wish to thank all the people who attended the weekly ZX meeting for many interesting discussions. I am also grateful to my college advisor Jonathan Barrett and department ad- visor Jamie Vicary, thank you for chatting with me about my research and my life. I particularly want to thank my examiners, Ross Duncan and Sam Staton, for their very detailed and helpful comments and corrections by which this thesis has been significantly improved. -
Lattice Surgery with a Twist: Simplifying Clifford Gates of Surface Codes
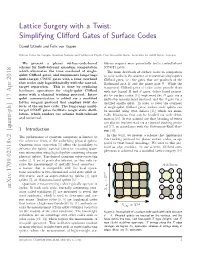
Lattice Surgery with a Twist: Simplifying Clifford Gates of Surface Codes Daniel Litinski and Felix von Oppen Dahlem Center for Complex Quantum Systems and Fachbereich Physik, Freie Universit¨at Berlin, Arnimallee 14, 14195 Berlin, Germany We present a planar surface-code-based bilizers requires more potentially faulty controlled-not scheme for fault-tolerant quantum computation (CNOT) gates. which eliminates the time overhead of single- The main drawback of surface codes in comparison qubit Clifford gates, and implements long-range to color codes is the absence of transversal single-qubit multi-target CNOT gates with a time overhead Clifford gates, i.e., the gates that are products of the that scales only logarithmically with the control- Hadamard gate H and the phase gate S. While the target separation. This is done by replacing transversal Clifford gates of color codes provide them hardware operations for single-qubit Clifford with fast logical H and S gates, defect-based propos- gates with a classical tracking protocol. Inter- als for surface codes [14] implement the H gate via a qubit communication is added via a modified multi-step measurement protocol, and the S gate via a lattice surgery protocol that employs twist de- distilled ancilla qubit. In order to lower the overhead fects of the surface code. The long-range multi- of single-qubit Clifford gates, surface code qubits can target CNOT gates facilitate magic state distil- be encoded using twist defects [15], which are essen- lation, which renders our scheme fault-tolerant tially Majoranas that can be braided via code defor- and universal. mation [16]. -

IJSRP, Volume 2, Issue 7, July 2012 Edition
International Journal of Scientific and Research Publications, Volume 2, Issue 7, July 2012 1 ISSN 2250-3153 OF QUANTUM GATES AND COLLAPSING STATES- A DETERMINATE MODEL APRIORI AND DIFFERENTIAL MODEL APOSTEORI 1DR K N PRASANNA KUMAR, 2PROF B S KIRANAGI AND 3 PROF C S BAGEWADI ABSTRACT : We Investigate The Holistic Model With Following Composition : ( 1) Mpc (Measurement Based Quantum Computing)(2) Preparational Methodologies Of Resource States (Application Of Electric Field Magnetic Field Etc.)For Gate Teleportation(3) Quantum Logic Gates(4) Conditionalities Of Quantum Dynamics(5) Physical Realization Of Quantum Gates(6) Selective Driving Of Optical Resonances Of Two Subsystems Undergoing Dipole-Dipole Interaction By Means Of Say Ramsey Atomic Interferometry(7) New And Efficient Quantum Algorithms For Computation(8) Quantum Entanglements And No localities(9) Computation Of Minimum Energy Of A Given System Of Particles For Experimentation(10) Exponentially Increasing Number Of Steps For Such Quantum Computation(11) Action Of The Quantum Gates(12) Matrix Representation Of Quantum Gates And Vector Constitution Of Quantum States. Stability Conditions, Analysis, Solutional Behaviour Are Discussed In Detailed For The Consummate System. The System Of Quantum Gates And Collapsing States Show Contrast With The Documented Information Thereto. Paper may be extended to exponential time with exponentially increasing steps in the computation. INTRODUCTION: LITERATURE REVIEW: Double quantum dots: interdot interactions, co-tunneling, and Kondo resonances without spin (See for details Qing-feng Sun, Hong Guo ) Authors show that through an interdot off-site electron correlation in a double quantum-dot (DQD) device, Kondo resonances emerge in the local density of states without the electron spin-degree of freedom. -
![Arxiv:2003.09412V2 [Quant-Ph] 7 Jul 2021 Hadamard-Free Circuits Expose the Structure of the Clifford Group](https://docslib.b-cdn.net/cover/5281/arxiv-2003-09412v2-quant-ph-7-jul-2021-hadamard-free-circuits-expose-the-structure-of-the-clifford-group-935281.webp)
Arxiv:2003.09412V2 [Quant-Ph] 7 Jul 2021 Hadamard-Free Circuits Expose the Structure of the Clifford Group
Hadamard-free circuits expose the structure of the Clifford group Sergey Bravyi and Dmitri Maslov IBM T. J. Watson Research Center, Yorktown Heights, NY 10598, USA July 8, 2021 Abstract The Clifford group plays a central role in quantum randomized benchmarking, quantum tomography, and error correction protocols. Here we study the structural properties of this group. We show that any Clifford operator can be uniquely written in the canonical form F1HSF2, where H is a layer of Hadamard gates, S is a permutation of qubits, and Fi are parameterized Hadamard-free circuits chosen from suitable subgroups of the Clifford group. Our canonical form provides a one-to-one correspondence between Clifford operators and layered quantum circuits. We report a polynomial-time algorithm for computing the canonical form. We employ this canonical form to generate a random uniformly distributed n-qubit Clifford operator in runtime O(n2). The number of random bits consumed by the algorithm matches the information-theoretic lower bound. A surprising connection is highlighted between random uniform Clifford operators and the Mallows distribution on the symmetric group. The variants of the canonical form, one with a short Hadamard- free part and one allowing a circuit depth 9n implementation of arbitrary Clifford unitaries in the Linear Nearest Neighbor architecture are also discussed. Finally, we study computational quantum advantage where a classical reversible linear circuit can be implemented more efficiently using Clifford gates, and show an explicit example where such an advantage takes place. 1 Introduction Clifford circuits can be defined as quantum computations by the circuits with Phase (p), Hadamard (h), and cnot gates, applied to a computational basis state, such as |00...0i. -

Quantum Topological Error Correction Codes Are Capable of Improving the Performance of Clifford Gates
1 Quantum Topological Error Correction Codes Are Capable of Improving the Performance of Clifford Gates Daryus Chandra, Zunaira Babar, Hung Viet Nguyen, Dimitrios Alanis, Panagiotis Botsinis, Soon Xin Ng, and Lajos Hanzo Abstract—The employment of quantum error correction codes under certain conditions we can transform various classes of (QECCs) within quantum computers potentially offers a reli- powerful classical error correction codes into their quantum ability improvement for both quantum computation and com- counterparts, such as Quantum Turbo Codes (QTCs) [8], [9], munications tasks. However, incorporating quantum gates for performing error correction potentially introduces more sources Quantum Low-Density Parity-Check (QLDPC) codes [10], of quantum decoherence into the quantum computers. In this [11], and Quantum Polar Codes (QPCs) [12], [13]. However, scenario, the primary challenge is to find the sufficient condition several challenges remain, hindering the immediate employ- required by each of the quantum gates for beneficially employing ment of these powerful QSCs in quantum computers. Firstly, QECCs in order to yield reliability improvements given that the the reliability of the state-of-the-art quantum gates is still quantum gates utilized by the QECCs also introduce quantum decoherence. In this treatise, we approach this problem by significantly lower compared to classical gates. For exam- firstly presenting the general framework of protecting quantum ple, the reliability of a two-qubit quantum gate is between gates by the amalgamation of the transversal configuration of 90:00% 99:90% across various technology platforms, such quantum gates and quantum stabilizer codes (QSCs), which can as spin− electronics, photonics, superconducting, trapped-ion, be viewed as syndrome-based QECCs. -
![Arxiv:2010.14788V2 [Quant-Ph] 16 Jan 2021 Detection of Ancillary Photons](https://docslib.b-cdn.net/cover/4051/arxiv-2010-14788v2-quant-ph-16-jan-2021-detection-of-ancillary-photons-974051.webp)
Arxiv:2010.14788V2 [Quant-Ph] 16 Jan 2021 Detection of Ancillary Photons
Heralded non-destructive quantum entangling gate with single-photon sources Jin-Peng Li,1, 2 Xuemei Gu,1, 2 Jian Qin,1, 2 Dian Wu,1, 2 Xiang You,1, 2 Hui Wang,1, 2 Christian Schneider,3, 4 Sven H¨ofling,2, 4 Yong-Heng Huo,1, 2 Chao-Yang Lu,1, 2 Nai-Le Liu,1, 2 Li Li,1, 2, ∗ and Jian-Wei Pan1, 2 1Hefei National Laboratory for Physical Sciences at Microscale and Department of Modern Physics, University of Science and Technology of China, Hefei, Anhui 230026, China 2CAS Center for Excellence and Synergetic Innovation Center in Quantum Information and Quantum Physics, University of Science and Technology of China, Shanghai 201315, China 3Institute of Physics, Carl von Ossietzky University, 26129 Oldenburg, Germany 4Technische Physik, Physikalische Institut and Wilhelm Conrad R¨ontgen-Centerfor Complex Material Systems, Universit¨atW¨urzburg, Am Hubland, D-97074 W¨urzburg, Germany (Dated: January 19, 2021) Heralded entangling quantum gates are an essential element for the implementation of large-scale optical quantum computation. Yet, the experimental demonstration of genuine heralded entangling gates with free-flying output photons in linear optical system, was hindered by the intrinsically probabilistic source and double-pair emission in parametric down-conversion. Here, by using an on-demand single-photon source based on a semiconductor quantum dot embedded in a micro-pillar cavity, we demonstrate a heralded controlled-NOT (CNOT) operation between two single photons for the first time. To characterize the performance of the CNOT gate, we estimate its average quantum gate fidelity of (87:8 ± 1:2)%. -

On the Significance of the Gottesman-Knill Theorem
On the Significance of the Gottesman-Knill Theorem∗;y Michael E. Cuffaro Munich Center for Mathematical Philosophy Ludwig Maximilians Universit¨atM¨unchen 1 Introduction Toil in the field of quantum computation promises a bountiful harvest, both to the pragmatic-minded researcher seeking to develop new and efficient solutions to practi- cal problems of immediate and transparent significance, as well as to those of us moved more by philosophical concerns: we who toil in the mud and black earth, ever desirous of those remote and yet more profound insights at the root of scientific inquiry. Some of us have seen in quantum computation the promise of a solution to the interpretational debates which have characterised the foundations and philosophy of quantum mechanics since its inception. Some of us have seen the prospects for a deeper understanding of the nature of computation as such. Others have seen quantum computation as potentially illuminating our understanding of the nature and capacities of the human mind.1 An arguably more modest position (see, e.g., Aaronson, 2013; Timpson, 2013) regard- ing the philosophical interest of quantum computation (and related fields like quantum information), is that its study contributes to our understanding of the foundations of quantum mechanics and computer science mainly by offering us different perspectives on old foundational questions|fresh opportunities, that is, to reconsider just what we mean in asking these questions. One of my goals in this paper is to provide such a different perspective, on the Bell inequalities in particular. Specifically I will be arguing that the ∗Note: this is the submitted version of an article that is to appear in The British Journal for the Philosophy of Science, published by Oxford University Press. -

Optimization of Reversible Circuits Using Toffoli Decompositions with Negative Controls
S S symmetry Article Optimization of Reversible Circuits Using Toffoli Decompositions with Negative Controls Mariam Gado 1,2,* and Ahmed Younes 1,2,3 1 Department of Mathematics and Computer Science, Faculty of Science, Alexandria University, Alexandria 21568, Egypt; [email protected] 2 Academy of Scientific Research and Technology(ASRT), Cairo 11516, Egypt 3 School of Computer Science, University of Birmingham, Birmingham B15 2TT, UK * Correspondence: [email protected]; Tel.: +203-39-21595; Fax: +203-39-11794 Abstract: The synthesis and optimization of quantum circuits are essential for the construction of quantum computers. This paper proposes two methods to reduce the quantum cost of 3-bit reversible circuits. The first method utilizes basic building blocks of gate pairs using different Toffoli decompositions. These gate pairs are used to reconstruct the quantum circuits where further optimization rules will be applied to synthesize the optimized circuit. The second method suggests using a new universal library, which provides better quantum cost when compared with previous work in both cost015 and cost115 metrics; this proposed new universal library “Negative NCT” uses gates that operate on the target qubit only when the control qubit’s state is zero. A combination of the proposed basic building blocks of pairs of gates and the proposed Negative NCT library is used in this work for synthesis and optimization, where the Negative NCT library showed better quantum cost after optimization compared with the NCT library despite having the same circuit size. The reversible circuits over three bits form a permutation group of size 40,320 (23!), which Citation: Gado, M.; Younes, A. -

Universal Quantum Computation with Ideal Clifford Gates and Noisy Ancillas
PHYSICAL REVIEW A 71, 022316 ͑2005͒ Universal quantum computation with ideal Clifford gates and noisy ancillas Sergey Bravyi* and Alexei Kitaev† Institute for Quantum Information, California Institute of Technology, Pasadena, 91125 California, USA ͑Received 6 May 2004; published 22 February 2005͒ We consider a model of quantum computation in which the set of elementary operations is limited to Clifford unitaries, the creation of the state ͉0͘, and qubit measurement in the computational basis. In addition, we allow the creation of a one-qubit ancilla in a mixed state , which should be regarded as a parameter of the model. Our goal is to determine for which universal quantum computation ͑UQC͒ can be efficiently simu- lated. To answer this question, we construct purification protocols that consume several copies of and produce a single output qubit with higher polarization. The protocols allow one to increase the polarization only along certain “magic” directions. If the polarization of along a magic direction exceeds a threshold value ͑about 65%͒, the purification asymptotically yields a pure state, which we call a magic state. We show that the Clifford group operations combined with magic states preparation are sufficient for UQC. The connection of our results with the Gottesman-Knill theorem is discussed. DOI: 10.1103/PhysRevA.71.022316 PACS number͑s͒: 03.67.Lx, 03.67.Pp I. INTRODUCTION AND SUMMARY additional operations ͑e.g., measurements by Aharonov- Bohm interference ͓13͔ or some gates that are not related to The theory of fault-tolerant quantum computation defines topology at all͒. Of course, these nontopological operations an important number called the error threshold. -
Classifying Reversible Logic Gates with Ancillary Bits
University of Calgary PRISM: University of Calgary's Digital Repository Graduate Studies The Vault: Electronic Theses and Dissertations 2019-07-23 Classifying reversible logic gates with ancillary bits Comfort, Cole Robert Comfort, C. R. (2019). Classifying reversible logic gates with ancillary bits (Unpublished master's thesis). University of Calgary, Calgary, AB. http://hdl.handle.net/1880/110665 master thesis University of Calgary graduate students retain copyright ownership and moral rights for their thesis. You may use this material in any way that is permitted by the Copyright Act or through licensing that has been assigned to the document. For uses that are not allowable under copyright legislation or licensing, you are required to seek permission. Downloaded from PRISM: https://prism.ucalgary.ca UNIVERSITY OF CALGARY Classifying reversible logic gates with ancillary bits by Cole Robert Comfort A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE GRADUATE PROGRAM IN COMPUTER SCIENCE CALGARY, ALBERTA JULY, 2019 c Cole Robert Comfort 2019 Abstract In this thesis, two models of reversible computing are classified, and the relation of reversible computing to quantum computing is explored. First, a finite, complete set of identities is given for the symmetric monoidal category generated by the computational ancillary bits along with the controlled-not gate. In doing so, it is proven that this category is equivalent to the category of partial isomorphisms between non-empty finitely-generated commutative torsors of characteristic 2. Next, a finite, complete set of identities is given for the symmetric monoidal category generated by the computational ancillary bits along with the Toffoli gate. -

Randomized Benchmarking of Two-Qubit Gates
Master's Thesis Randomized Benchmarking of Two-Qubit Gates Department of Physics Laboratory for Solid State Physics Quantum Device Lab August 28, 2015 Author: Samuel Haberthur¨ Supervisor: Yves Salathe´ Principal Investor: Prof. Dr. Andreas Wallraff Abstract On the way to high-fidelity quantum gates, accurate estimation of the gate errors is essential. Randomized benchmarking (RB) provides a tool to classify and characterize the errors of multi- qubit gates. Here we implement RB to investigate the fidelity of single-qubit and two-qubit gates in the Clifford group realized on a superconducting transmon qubit system. This thesis provides an overview of the current randomized benchmarking methods and gives detailed discussions of how to estimate the gate error. For single-qubit gates an average gate fidelity of 99:6(1) % was obtained. Furthermore, it shows how two-qubit gates are realized and how they can be calibrated to achieve high fidelities. Here, the focus lies on the controlled phase gate and iswap gate, which are both implemented using fast magnetic flux pulses. For the former, fidelities above 92 % were estimated. Also a decreasing of average gate fidelity over time was observed. Finally, a method for achieving scalable iSwap gates is proposed. Contents 1. Motivation 6 2. Superconducting Quantum Circuits8 2.1. Electromagnetic Oscillators..............................8 2.2. The Transmon Qubit.................................. 11 2.3. Circuit QED...................................... 13 2.4. Readout and Single Quantum Gates......................... 15 2.5. Coherence Time.................................... 17 2.6. Experimental Setup.................................. 18 3. Single-Qubit Randomized Benchmarking 21 3.1. Randomized Noise Estimation............................. 22 3.2. Pauli Method...................................... 23 3.3. -

Lecture 1: Introduction to the Quantum Circuit Model September 9, 2015 Lecturer: Ryan O’Donnell Scribe: Ryan O’Donnell
Quantum Computation (CMU 18-859BB, Fall 2015) Lecture 1: Introduction to the Quantum Circuit Model September 9, 2015 Lecturer: Ryan O'Donnell Scribe: Ryan O'Donnell 1 Overview of what is to come 1.1 An incredibly brief history of quantum computation The idea of quantum computation was pioneered in the 1980s mainly by Feynman [Fey82, Fey86] and Deutsch [Deu85, Deu89], with Albert [Alb83] independently introducing quantum automata and with Benioff [Ben80] analyzing the link between quantum mechanics and reversible classical computation. The initial idea of Feynman was the following: Although it is perfectly possible to use a (normal) computer to simulate the behavior of n-particle systems evolving according to the laws of quantum, it seems be extremely inefficient. In particular, it seems to take an amount of time/space that is exponential in n. This is peculiar because the actual particles can be viewed as simulating themselves efficiently. So why not call the particles themselves a \computer"? After all, although we have sophisticated theoretical models of (normal) computation, in the end computers are ultimately physical objects operating according to the laws of physics. If we simply regard the particles following their natural quantum-mechanical behavior as a computer, then this \quantum computer" appears to be performing a certain computation (namely, simulating a quantum system) exponentially more efficiently than we know how to perform it with a normal, \classical" computer. Perhaps we can carefully engineer multi-particle systems in such a way that their natural quantum behavior will do other interesting computations exponentially more efficiently than classical computers can.