Structural Analysis Equations Douglas R
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

3 Concepts of Stress Analysis
FEA Concepts: SW Simulation Overview J.E. Akin 3 Concepts of Stress Analysis 3.1 Introduction Here the concepts of stress analysis will be stated in a finite element context. That means that the primary unknown will be the (generalized) displacements. All other items of interest will mainly depend on the gradient of the displacements and therefore will be less accurate than the displacements. Stress analysis covers several common special cases to be mentioned later. Here only two formulations will be considered initially. They are the solid continuum form and the shell form. Both are offered in SW Simulation. They differ in that the continuum form utilizes only displacement vectors, while the shell form utilizes displacement vectors and infinitesimal rotation vectors at the element nodes. As illustrated in Figure 3‐1, the solid elements have three translational degrees of freedom (DOF) as nodal unknowns, for a total of 12 or 30 DOF. The shell elements have three translational degrees of freedom as well as three rotational degrees of freedom, for a total of 18 or 36 DOF. The difference in DOF types means that moments or couples can only be applied directly to shell models. Solid elements require that couples be indirectly applied by specifying a pair of equivalent pressure distributions, or an equivalent pair of equal and opposite forces at two nodes on the body. Shell node Solid node Figure 3‐1 Nodal degrees of freedom for frames and shells; solids and trusses Stress transfer takes place within, and on, the boundaries of a solid body. The displacement vector, u, at any point in the continuum body has the units of meters [m], and its components are the primary unknowns. -
Structural Analysis
Module 1 Energy Methods in Structural Analysis Version 2 CE IIT, Kharagpur Lesson 1 General Introduction Version 2 CE IIT, Kharagpur Instructional Objectives After reading this chapter the student will be able to 1. Differentiate between various structural forms such as beams, plane truss, space truss, plane frame, space frame, arches, cables, plates and shells. 2. State and use conditions of static equilibrium. 3. Calculate the degree of static and kinematic indeterminacy of a given structure such as beams, truss and frames. 4. Differentiate between stable and unstable structure. 5. Define flexibility and stiffness coefficients. 6. Write force-displacement relations for simple structure. 1.1 Introduction Structural analysis and design is a very old art and is known to human beings since early civilizations. The Pyramids constructed by Egyptians around 2000 B.C. stands today as the testimony to the skills of master builders of that civilization. Many early civilizations produced great builders, skilled craftsmen who constructed magnificent buildings such as the Parthenon at Athens (2500 years old), the great Stupa at Sanchi (2000 years old), Taj Mahal (350 years old), Eiffel Tower (120 years old) and many more buildings around the world. These monuments tell us about the great feats accomplished by these craftsmen in analysis, design and construction of large structures. Today we see around us countless houses, bridges, fly-overs, high-rise buildings and spacious shopping malls. Planning, analysis and construction of these buildings is a science by itself. The main purpose of any structure is to support the loads coming on it by properly transferring them to the foundation. -

Module Code CE7S02 Module Name Advanced Structural Analysis ECTS
Module Code CE7S02 Module Name Advanced Structural Analysis 1 ECTS Weighting 5 ECTS Semester taught Semester 1 Module Coordinator/s Module Coordinator: Assoc. Prof. Dermot O’Dwyer ([email protected]) Module Learning Outcomes with reference On successful completion of this module, students should be able to: to the Graduate Attributes and how they are developed in discipline LO1. Identify the appropriate differential equations and boundary conditions for analysing a range of structural analysis and solid mechanics problems. LO2. Implement the finite difference method to solve a range of continuum problems. LO3. Implement a basic beam-element finite element analysis. LO4. Implement a basic variational-based finite element analysis. LO5. Implement time-stepping algorithms and modal analysis algorithms to analyse structural dynamics problems. L06. Detail the assumptions and limitations underlying their analyses and quantify the errors/check for convergence. Graduate Attributes: levels of attainment To act responsibly - ho ose an item. To think independently - hoo se an item. To develop continuously - hoo se an it em. To communicate effectively - hoo se an item. Module Content The Advanced Structural Analysis Module can be taken as a Level 9 course in a single year for 5 credits or as a Level 10 courses over two years for the total of 10 credits. The first year of the module is common to all students, in the second year Level 10 students who have completed the first year of the module will lead the work groups. The course will run throughout the first semester. The aim of the course is to develop the ability of postgraduate Engineering students to develop and implement non-trivial analysis and modelling algorithms. -
“Linear Buckling” Analysis Branch
Appendix A Eigenvalue Buckling Analysis 16.0 Release Introduction to ANSYS Mechanical 1 © 2015 ANSYS, Inc. February 27, 2015 Chapter Overview In this Appendix, performing an eigenvalue buckling analysis in Mechanical will be covered. Mechanical enables you to link the Eigenvalue Buckling analysis to a nonlinear Static Structural analysis that can include all types of nonlinearities. This will not be covered in this section. We will focused on Linear buckling. Contents: A. Background On Buckling B. Buckling Analysis Procedure C. Workshop AppA-1 2 © 2015 ANSYS, Inc. February 27, 2015 A. Background on Buckling Many structures require an evaluation of their structural stability. Thin columns, compression members, and vacuum tanks are all examples of structures where stability considerations are important. At the onset of instability (buckling) a structure will have a very large change in displacement {x} under essentially no change in the load (beyond a small load perturbation). F F Stable Unstable 3 © 2015 ANSYS, Inc. February 27, 2015 … Background on Buckling Eigenvalue or linear buckling analysis predicts the theoretical buckling strength of an ideal linear elastic structure. This method corresponds to the textbook approach of linear elastic buckling analysis. • The eigenvalue buckling solution of a Euler column will match the classical Euler solution. Imperfections and nonlinear behaviors prevent most real world structures from achieving their theoretical elastic buckling strength. Linear buckling generally yields unconservative results -
Structural Analysis (Statics & Mechanics)
APPLIED ARCHITECTURAL STRUCTURES: STRUCTURAL ANALYSIS AND SYSTEMS Structural Requirements ARCH 631 • serviceability DR. ANNE NICHOLS FALL 2013 – strength – deflections lecture two • efficiency – economy of materials • construction structural analysis • cost (statics & mechanics) • other www.pbs.org/wgbh/buildingbig/ Analysis 1 Applied Architectural Structures F2009abn Analysis 2 Architectural Structures III F2009abn Lecture 2 ARCH 631 Lecture 2 ARCH 631 Structure Requirements Structure Requirements • strength & • stability & equilibrium stiffness – safety – stability of – stresses components not greater – minimum than deflection and strength vibration – adequate – adequate foundation foundation Analysis 3 Architectural Structures III F2008abn Analysis 4 Architectural Structures III F2008abn Lecture 2 ARCH 631 Lecture 2 ARCH 631 1 Structure Requirements Relation to Architecture • economy and “The geometry and arrangement of the construction load-bearing members, the use of – minimum material materials, and the crafting of joints all represent opportunities for buildings to – standard sized express themselves. The best members buildings are not designed by – simple connections architects who after resolving the and details formal and spatial issues, simply ask – maintenance the structural engineer to make sure it – fabrication/ erection doesn’t fall down.” - Onouy & Kane Analysis 5 Architectural Structures III F2008abn Analysis 6 Architectural Structures III F2008abn Lecture 2 ARCH 631 Lecture 2 ARCH 631 Structural Loads - STATIC Structural -

Simulating Sliding Wear with Finite Element Method
Tribology International 32 (1999) 71–81 www.elsevier.com/locate/triboint Simulating sliding wear with finite element method Priit Po˜dra a,*,So¨ren Andersson b a Department of Machine Science, Tallinn Technical University, TTU, Ehitajate tee 5, 19086 Tallinn, Estonia b Machine Elements, Department of Machine Design, Royal Institute of Technology, KTH, S-100 44 Stockholm, Sweden Received 5 September 1997; received in revised form 18 January 1999; accepted 25 March 1999 Abstract Wear of components is often a critical factor influencing the product service life. Wear prediction is therefore an important part of engineering. The wear simulation approach with commercial finite element (FE) software ANSYS is presented in this paper. A modelling and simulation procedure is proposed and used with the linear wear law and the Euler integration scheme. Good care, however, must be taken to assure model validity and numerical solution convergence. A spherical pin-on-disc unlubricated steel contact was analysed both experimentally and with FEM, and the Lim and Ashby wear map was used to identify the wear mech- anism. It was shown that the FEA wear simulation results of a given geometry and loading can be treated on the basis of wear coefficientϪsliding distance change equivalence. The finite element software ANSYS is well suited for the solving of contact problems as well as the wear simulation. The actual scatter of the wear coefficient being within the limits of ±40–60% led to considerable deviation of wear simulation results. These results must therefore be evaluated on a relative scale to compare different design options. 1999 Elsevier Science Ltd. -

Shapebuilder 3 Properties Defined
ShapeBuilder 3.0 Geometric and Structural Properties Coordinate systems: Global (X,Y), Centroidal (x,y), Principal (1,2) Basic Symbols Units Notes: Definitions Geometric Analysis or Properties Shape Types, Area A, L2 Non-composite Gross (or full) Cross-sectional area of the shape. Also Ag shapes. A = dA ∫ A Depth d L All Total or maximum depth in the y direction from the extreme fiber at the top to the extreme fiber at the bottom. Width b, L All Total or maximum width in the x direction from the extreme fiber at the left to the extreme fiber at Also w the right. 2 Net Area An L Non-composite Net cross-sectional area, after subtracting interior holes. shapes with A = dA − A interior holes ∫ ∑ hole A Holes Perimeter p L All The sum of the external edges of the shape. Useful for calculating the surface area of a member for painting. Center of c.g., (Point) (L,L) All, unless That point where the moment of the area is zero about any axis. This point is measured from the Gravity Also located at the global XY axes. Centroid of (Xc,Yc) global origin. xdA ydA Area ∫ ∫ x = A , y = A c A c A 4 Moments of Ix, Iy, Ixy L All Second moment of the area with respect to the subscripted axis, a measure of the stiffness of the Inertia cross section and its ability to resist bending moments. I = y 2 dA, I = x 2 dA, I = xydA x ∫ y ∫ xy ∫ A A A Principal Axes 1, 2, Θ, Coordinate Any shape The axes orientation at which the maximum and minimum moments of inertia are obtained. -
Polar Moment of Inertia 2 J0 I Z R Da
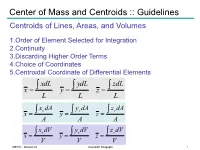
Center of Mass and Centroids :: Guidelines Centroids of Lines, Areas, and Volumes 1.Order of Element Selected for Integration 2.Continuity 3.Discarding Higher Order Terms 4.Choice of Coordinates 5.Centroidal Coordinate of Differential Elements xdL ydL zdL x y z L L L x dA y dA z dA x c y c z c A A A x dV y dV z dV x c y c z c V V V ME101 - Division III Kaustubh Dasgupta 1 Center of Mass and Centroids Theorem of Pappus: Area of Revolution - method for calculating surface area generated by revolving a plane curve about a non-intersecting axis in the plane of the curve Surface Area Area of the ring element: circumference times dL dA = 2πy dL If area is revolved Total area, A 2 ydL through an angle θ<2π θ in radians yL ydL A 2 yL or A y L y is the y-coordinate of the centroid C for the line of length L Generated area is the same as the lateral area of a right circular cylinder of length L and radius y Theorem of Pappus can also be used to determine centroid of plane curves if area created by revolving these figures @ a non-intersecting axis is known ME101 - Division III Kaustubh Dasgupta 2 Center of Mass and Centroids Theorem of Pappus: Volume of Revolution - method for calculating volume generated by revolving an area about a non-intersecting axis in the plane of the area Volume Volume of the ring element: circumference times dA dV = 2πy dA If area is revolved Total Volume, V 2 ydA through an angle θ<2π θ in radians yA ydA V 2 yA or V yA is the y-coordinate of the centroid C of the y revolved area A Generated volume is obtained by multiplying the generating area by the circumference of the circular path described by its centroid. -

Pure Torsion of Shafts: a Special Case
THEORY OF SIMPLE TORSION- When torque is applied to a uniform circular shaft ,then every section of the shaft is subjected to a state of pure shear (Fig. ), the moment of resistance developed by the shear stresses being everywhere equal to the magnitude, and opposite in sense, to the applied torque. For derivation purpose a simple theory is used to describe the behaviour of shafts subjected to torque . fig. shows hear System Set Up on an Element in the Surface of a Shaft ubjected to Torsion Resisting torque, T Applied torque T $ssumptions (%) The material is homogeneous, i.e. of uniform elastic properties throughout. (&) The material is elastic, following Hooke's law with shear stress proportional to shear strain. (*) The stress does not e+ceed the elastic limit or limit of proportionality. (,) Circular sections remain circular. (.) Cross-sections remain plane. (#his is certainly not the case with the torsion of non-circular sections.) (0) Cross-sections rotate as if rigid, i.e. every diameter rotates through the same angle. BASIC CONCEPTS 1. Torsion = Twisting 2. Rotation about longitudinal axis. 3. The e+ternal moment which causes twisting are known as Torque / twisting moment. 4. When twisting is done by a force (not a moment), then force required for torsion is normal to longitudinal axis having certain eccentricity from centroid. 5. Torque applied in non-circular section will cause 'warping'. Qualitative analysis is not in our syllabus 6. Torsion causes shear stress between circular planes. 7. Plane section remains plane during torsion. It means that if you consider the shaft to be composed to infinite circular discs. -

Shafts: Torsion Loading and Deformation
Third Edition LECTURE SHAFTS: TORSION LOADING AND DEFORMATION • A. J. Clark School of Engineering •Department of Civil and Environmental Engineering 6 by Dr. Ibrahim A. Assakkaf SPRING 2003 Chapter ENES 220 – Mechanics of Materials 3.1 - 3.5 Department of Civil and Environmental Engineering University of Maryland, College Park LECTURE 6. SHAFTS: TORSION LOADING AND DEFORMATION (3.1 – 3.5) Slide No. 1 Torsion Loading ENES 220 ©Assakkaf Introduction – Members subjected to axial loads were discussed previously. – The procedure for deriving load- deformation relationship for axially loaded members was also illustrated. – This chapter will present a similar treatment of members subjected to torsion by loads that to twist the members about their longitudinal centroidal axes. 1 LECTURE 6. SHAFTS: TORSION LOADING AND DEFORMATION (3.1 – 3.5) Slide No. 2 Torsion Loading ENES 220 ©Assakkaf Torsional Loads on Circular Shafts • Interested in stresses and strains of circular shafts subjected to twisting couples or torques • Turbine exerts torque T on the shaft • Shaft transmits the torque to the generator • Generator creates an equal and opposite torque T’ LECTURE 6. SHAFTS: TORSION LOADING AND DEFORMATION (3.1 – 3.5) Slide No. 3 Torsion Loading ENES 220 ©Assakkaf Net Torque Due to Internal Stresses • Net of the internal shearing stresses is an internal torque, equal and opposite to the applied torque, T = ∫∫ρ dF = ρ(τ dA) • Although the net torque due to the shearing stresses is known, the distribution of the stresses is not • Distribution of shearing stresses is statically indeterminate – must consider shaft deformations • Unlike the normal stress due to axial loads, the distribution of shearing stresses due to torsional loads can not be assumed uniform. -

The MODIFIED COMPRESSION FIELD THEORY: THEN and NOW
SP-328—3 The MODIFIED COMPRESSION FIELD THEORY: THEN AND NOW Vahid Sadeghian and Frank Vecchio Abstract: The Modified Compression Field Theory (MCFT) was introduced almost 40 years ago as a simple and effective model for calculating the response of reinforced concrete elements under general loading conditions with particular focus on shear. The model was based on a smeared rotating crack concept, and treated cracked reinforced concrete as a new orthotropic material with unique constitutive relationships. An extension of MCFT, known as the Disturbed Stress Field Model (DSFM), was later developed which removed some restrictions and increased the accuracy of the method. The MCFT has been adapted to various types of finite element analysis programs as well as structural design codes. In recent years, the application of the method has been extended to more advanced research areas including extreme loading conditions, stochastic analysis, fiber-reinforced concrete, repaired structures, multi- scale analysis, and hybrid simulation. This paper presents a brief overview of the original formulation and its evolvement over the last three decades. In addition, the adaptation of the method to advanced research areas are discussed. It is concluded that the MCFT remains a viable and effective model, whose value lies in its simple yet versatile formulation which enables it to serve as a foundation for accurately solving many diverse and complex problems pertaining to reinforced concrete structures. Keywords: nonlinear analysis; reinforced concrete; shear behavior 3.1 Vahid Sadeghian and Frank Vecchio Biography: Vahid Sadeghian is a PhD graduate at the Department of Civil Engineering at the University of Toronto. His research interests include hybrid (experimental-numerical) simulation, multi-platform analysis of reinforced concrete structures, and performance assessment of repaired structures. -

Problem Set #8 Solution 1.050 Solid Mechanics Fall 2004
Problem Set #8 Solution 1.050 Solid Mechanics Fall 2004 Problem 8.1 A solid aluminum, circular shaft has length 0.35 m and diameter 6 mm. How much does one end rotate relative to the other if a torque about the shaft axis of 10 N-m is applied? GJ We turn to the stiffness relationship, M = ------- φ⋅ in order to determine the relative angle of twist, t L φ, over the length of the shaft, L. For a solid circular shaft, the moment of inertia, J= πR4/2. The shear mod- E ulus G is related to the material’s elastic modulus and Poisson’s ratio by G = -------------------- and the elastic mod 21( + ν) ulus for Aluminum, found in the table on page 212 is 70 E 09 N/m2. Taking Poisson’s ratio as 1/3, G then evaluates to 26 E 09 N/m2. Putting all of this together gives φ L ⋅ an angle of rotation = ------- Mt = 1.06 radians . The maximum shear stress is obtained from τ ⁄ GJ max = MtRJ. τ × 08 2 This evaluates to max = 2.36 10 N/m (This is the change 12 Nov. 04). *** What follows is an excursion which considers the possibility of plastic flow in the shaft. We see that the maximum shear stress is near or greater than τ one-half the yield stress (in tension) of the three types of Aluminum τ given in the table in chapter 7. So what will ensue? y To proceed, we need a model for the constitutive behavior that G includes the relationship between shear stress and shear strain beyond the elastic range.