3 Functions and Graphs
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Plotting, Derivatives, and Integrals for Teaching Calculus in R
Plotting, Derivatives, and Integrals for Teaching Calculus in R Daniel Kaplan, Cecylia Bocovich, & Randall Pruim July 3, 2012 The mosaic package provides a command notation in R designed to make it easier to teach and to learn introductory calculus, statistics, and modeling. The principle behind mosaic is that a notation can more effectively support learning when it draws clear connections between related concepts, when it is concise and consistent, and when it suppresses extraneous form. At the same time, the notation needs to mesh clearly with R, facilitating students' moving on from the basics to more advanced or individualized work with R. This document describes the calculus-related features of mosaic. As they have developed histori- cally, and for the main as they are taught today, calculus instruction has little or nothing to do with statistics. Calculus software is generally associated with computer algebra systems (CAS) such as Mathematica, which provide the ability to carry out the operations of differentiation, integration, and solving algebraic expressions. The mosaic package provides functions implementing he core operations of calculus | differen- tiation and integration | as well plotting, modeling, fitting, interpolating, smoothing, solving, etc. The notation is designed to emphasize the roles of different kinds of mathematical objects | vari- ables, functions, parameters, data | without unnecessarily turning one into another. For example, the derivative of a function in mosaic, as in mathematics, is itself a function. The result of fitting a functional form to data is similarly a function, not a set of numbers. Traditionally, the calculus curriculum has emphasized symbolic algorithms and rules (such as xn ! nxn−1 and sin(x) ! cos(x)). -

Solutions to HW Due on Feb 13
Math 432 - Real Analysis II Solutions to Homework due February 13 In class, we learned that the n-th remainder for a smooth function f(x) defined on some open interval containing 0 is given by n−1 X f (k)(0) R (x) = f(x) − xk: n k! k=0 Taylor's Theorem gives a very helpful expression of this remainder. It says that for some c between 0 and x, f (n)(c) R (x) = xn: n n! A function is called analytic on a set S if 1 X f (k)(0) f(x) = xk k! k=0 for all x 2 S. In other words, f is analytic on S if and only if limn!1 Rn(x) = 0 for all x 2 S. Question 1. Use Taylor's Theorem to prove that all polynomials are analytic on all R by showing that Rn(x) ! 0 for all x 2 R. Solution 1. Let f(x) be a polynomial of degree m. Then, for all k > m derivatives, f (k)(x) is the constant 0 function. Thus, for any x 2 R, Rn(x) ! 0. So, the polynomial f is analytic on all R. x Question 2. Use Taylor's Theorem to prove that e is analytic on all R. by showing that Rn(x) ! 0 for all x 2 R. Solution 2. Note that f (k)(x) = ex for all k. Fix an x 2 R. Then, by Taylor's Theorem, ecxn R (x) = n n! for some c between 0 and x. We now proceed with two cases. -

Even and Odd Functions Fourier Series Take on Simpler Forms for Even and Odd Functions Even Function a Function Is Even If for All X
04-Oct-17 Even and Odd functions Fourier series take on simpler forms for Even and Odd functions Even function A function is Even if for all x. The graph of an even function is symmetric about the y-axis. In this case Examples: 4 October 2017 MATH2065 Introduction to PDEs 2 1 04-Oct-17 Even and Odd functions Odd function A function is Odd if for all x. The graph of an odd function is skew-symmetric about the y-axis. In this case Examples: 4 October 2017 MATH2065 Introduction to PDEs 3 Even and Odd functions Most functions are neither odd nor even E.g. EVEN EVEN = EVEN (+ + = +) ODD ODD = EVEN (- - = +) ODD EVEN = ODD (- + = -) 4 October 2017 MATH2065 Introduction to PDEs 4 2 04-Oct-17 Even and Odd functions Any function can be written as the sum of an even plus an odd function where Even Odd Example: 4 October 2017 MATH2065 Introduction to PDEs 5 Fourier series of an EVEN periodic function Let be even with period , then 4 October 2017 MATH2065 Introduction to PDEs 6 3 04-Oct-17 Fourier series of an EVEN periodic function Thus the Fourier series of the even function is: This is called: Half-range Fourier cosine series 4 October 2017 MATH2065 Introduction to PDEs 7 Fourier series of an ODD periodic function Let be odd with period , then This is called: Half-range Fourier sine series 4 October 2017 MATH2065 Introduction to PDEs 8 4 04-Oct-17 Odd and Even Extensions Recall the temperature problem with the heat equation. -

Further Analysis on Classifications of PDE(S) with Variable Coefficients
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Applied Mathematics Letters 23 (2010) 966–970 Contents lists available at ScienceDirect Applied Mathematics Letters journal homepage: www.elsevier.com/locate/aml Further analysis on classifications of PDE(s) with variable coefficients A. Kılıçman a,∗, H. Eltayeb b, R.R. Ashurov c a Department of Mathematics and Institute for Mathematical Research, Universiti Putra Malaysia, 43400 UPM, Serdang, Selangor, Malaysia b Mathematics Department, College of Science, King Saud University, P.O.Box 2455, Riyadh 11451, Saudi Arabia c Institute of Advance Technology, Universiti Putra Malaysia, 43400 UPM, Serdang, Selangor, Malaysia article info a b s t r a c t Article history: In this study we consider further analysis on the classification problem of linear second Received 1 April 2009 order partial differential equations with non-constant coefficients. The equations are Accepted 13 April 2010 produced by using convolution with odd or even functions. It is shown that the patent of classification of new equations is similar to the classification of the original equations. Keywords: ' 2010 Elsevier Ltd. All rights reserved. Even and odd functions Double convolution Classification 1. Introduction The subject of partial differential equations (PDE's) has a long history and a wide range of applications. Some second- order linear partial differential equations can be classified as parabolic, hyperbolic or elliptic in order to have a guide to appropriate initial and boundary conditions, as well as to the smoothness of the solutions. If a PDE has coefficients which are not constant, it is possible that it is of mixed type. -

Elements of Chapter 9: Nonlinear Systems Examples
Elements of Chapter 9: Nonlinear Systems To solve x0 = Ax, we use the ansatz that x(t) = eλtv. We found that λ is an eigenvalue of A, and v an associated eigenvector. We can also summarize the geometric behavior of the solutions by looking at a plot- However, there is an easier way to classify the stability of the origin (as an equilibrium), To find the eigenvalues, we compute the characteristic equation: p Tr(A) ± ∆ λ2 − Tr(A)λ + det(A) = 0 λ = 2 which depends on the discriminant ∆: • ∆ > 0: Real λ1; λ2. • ∆ < 0: Complex λ = a + ib • ∆ = 0: One eigenvalue. The type of solution depends on ∆, and in particular, where ∆ = 0: ∆ = 0 ) 0 = (Tr(A))2 − 4det(A) This is a parabola in the (Tr(A); det(A)) coordinate system, inside the parabola is where ∆ < 0 (complex roots), and outside the parabola is where ∆ > 0. We can then locate the position of our particular trace and determinant using the Poincar´eDiagram and it will tell us what the stability will be. Examples Given the system where x0 = Ax for each matrix A below, classify the origin using the Poincar´eDiagram: 1 −4 1. 4 −7 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = −6 Det(A) = −7 + 16 = 9 ∆ = 36 − 4 · 9 = 0 Therefore, we have a \degenerate sink" at the origin. 1 2 2. −5 −1 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = 0 Det(A) = −1 + 10 = 9 ∆ = 02 − 4 · 9 = −36 The origin is a center. 1 3. Given the system x0 = Ax where the matrix A depends on α, describe how the equilibrium solution changes depending on α (use the Poincar´e Diagram): 2 −5 (a) α −2 SOLUTION: The trace is 0, so that puts us on the \det(A)" axis. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

The Linear Algebra Version of the Chain Rule 1
Ralph M Kaufmann The Linear Algebra Version of the Chain Rule 1 Idea The differential of a differentiable function at a point gives a good linear approximation of the function – by definition. This means that locally one can just regard linear functions. The algebra of linear functions is best described in terms of linear algebra, i.e. vectors and matrices. Now, in terms of matrices the concatenation of linear functions is the matrix product. Putting these observations together gives the formulation of the chain rule as the Theorem that the linearization of the concatenations of two functions at a point is given by the concatenation of the respective linearizations. Or in other words that matrix describing the linearization of the concatenation is the product of the two matrices describing the linearizations of the two functions. 1. Linear Maps Let V n be the space of n–dimensional vectors. 1.1. Definition. A linear map F : V n → V m is a rule that associates to each n–dimensional vector ~x = hx1, . xni an m–dimensional vector F (~x) = ~y = hy1, . , yni = hf1(~x),..., (fm(~x))i in such a way that: 1) For c ∈ R : F (c~x) = cF (~x) 2) For any two n–dimensional vectors ~x and ~x0: F (~x + ~x0) = F (~x) + F (~x0) If m = 1 such a map is called a linear function. Note that the component functions f1, . , fm are all linear functions. 1.2. Examples. 1) m=1, n=3: all linear functions are of the form y = ax1 + bx2 + cx3 for some a, b, c ∈ R. -

Polynomials and Quadratics
Higher hsn .uk.net Mathematics UNIT 2 OUTCOME 1 Polynomials and Quadratics Contents Polynomials and Quadratics 64 1 Quadratics 64 2 The Discriminant 66 3 Completing the Square 67 4 Sketching Parabolas 70 5 Determining the Equation of a Parabola 72 6 Solving Quadratic Inequalities 74 7 Intersections of Lines and Parabolas 76 8 Polynomials 77 9 Synthetic Division 78 10 Finding Unknown Coefficients 82 11 Finding Intersections of Curves 84 12 Determining the Equation of a Curve 86 13 Approximating Roots 88 HSN22100 This document was produced specially for the HSN.uk.net website, and we require that any copies or derivative works attribute the work to Higher Still Notes. For more details about the copyright on these notes, please see http://creativecommons.org/licenses/by-nc-sa/2.5/scotland/ Higher Mathematics Unit 2 – Polynomials and Quadratics OUTCOME 1 Polynomials and Quadratics 1 Quadratics A quadratic has the form ax2 + bx + c where a, b, and c are any real numbers, provided a ≠ 0 . You should already be familiar with the following. The graph of a quadratic is called a parabola . There are two possible shapes: concave up (if a > 0 ) concave down (if a < 0 ) This has a minimum This has a maximum turning point turning point To find the roots (i.e. solutions) of the quadratic equation ax2 + bx + c = 0, we can use: factorisation; completing the square (see Section 3); −b ± b2 − 4 ac the quadratic formula: x = (this is not given in the exam). 2a EXAMPLES 1. Find the roots of x2 −2 x − 3 = 0 . -
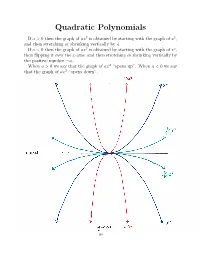
Quadratic Polynomials
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola. -

Characterization of Non-Differentiable Points in a Function by Fractional Derivative of Jumarrie Type
Characterization of non-differentiable points in a function by Fractional derivative of Jumarrie type Uttam Ghosh (1), Srijan Sengupta(2), Susmita Sarkar (2), Shantanu Das (3) (1): Department of Mathematics, Nabadwip Vidyasagar College, Nabadwip, Nadia, West Bengal, India; Email: [email protected] (2):Department of Applied Mathematics, Calcutta University, Kolkata, India Email: [email protected] (3)Scientist H+, RCSDS, BARC Mumbai India Senior Research Professor, Dept. of Physics, Jadavpur University Kolkata Adjunct Professor. DIAT-Pune Ex-UGC Visiting Fellow Dept. of Applied Mathematics, Calcutta University, Kolkata India Email (3): [email protected] The Birth of fractional calculus from the question raised in the year 1695 by Marquis de L'Hopital to Gottfried Wilhelm Leibniz, which sought the meaning of Leibniz's notation for the derivative of order N when N = 1/2. Leibnitz responses it is an apparent paradox from which one day useful consequences will be drown. Abstract There are many functions which are continuous everywhere but not differentiable at some points, like in physical systems of ECG, EEG plots, and cracks pattern and for several other phenomena. Using classical calculus those functions cannot be characterized-especially at the non- differentiable points. To characterize those functions the concept of Fractional Derivative is used. From the analysis it is established that though those functions are unreachable at the non- differentiable points, in classical sense but can be characterized using Fractional derivative. In this paper we demonstrate use of modified Riemann-Liouvelli derivative by Jumarrie to calculate the fractional derivatives of the non-differentiable points of a function, which may be one step to characterize and distinguish and compare several non-differentiable points in a system or across the systems. -

Fourier Series
Chapter 10 Fourier Series 10.1 Periodic Functions and Orthogonality Relations The differential equation ′′ y + 2y = F cos !t models a mass-spring system with natural frequency with a pure cosine forcing function of frequency !. If 2 = !2 a particular solution is easily found by undetermined coefficients (or by∕ using Laplace transforms) to be F y = cos !t. p 2 !2 − If the forcing function is a linear combination of simple cosine functions, so that the differential equation is N ′′ 2 y + y = Fn cos !nt n=1 X 2 2 where = !n for any n, then, by linearity, a particular solution is obtained as a sum ∕ N F y (t)= n cos ! t. p 2 !2 n n=1 n X − This simple procedure can be extended to any function that can be repre- sented as a sum of cosine (and sine) functions, even if that summation is not a finite sum. It turns out that the functions that can be represented as sums in this form are very general, and include most of the periodic functions that are usually encountered in applications. 723 724 10 Fourier Series Periodic Functions A function f is said to be periodic with period p> 0 if f(t + p)= f(t) for all t in the domain of f. This means that the graph of f repeats in successive intervals of length p, as can be seen in the graph in Figure 10.1. y p 2p 3p 4p 5p Fig. 10.1 An example of a periodic function with period p.