Development and Testing of an Automatic Transmission Shift Schedule Algorithm for Vehicle Simulation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Modern Design and Control of Automatic Transmission and The
Review Paper doi:10.5937/jaes13-7727 Paper number: 13(2015)1, 313, 51 - 59 MODERN DESIGN AND CONTROL OF AUTOMATIC TRANSMISSION AND THE PROSPECTS OF DEVELOPMENT Dejan Matijević The School of Electrical and Computer Engineering of Applied Studies, Belgrade, Serbia Ivan Ivanković* University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia Dr Vladimir Popović University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia The paper provides an overview of modern technical solutions of automatic transmissions in auto- motive industry with their influence on sustainable development. The objective of the first section is a structural view of specific constructions and control systems of presently used automatic transmis- sions, with emphasis on mechatronics implementation. The second section is based on perspectives of development, by integrating some branches of soft computing, such as fuzzy logic and artificial neural networks in order to create an optimal control algorithm for obtaining a contribution to fuel economy, exhaust emission, comfort and vehicle performance. Key words: Automatic transmission, Mechatronics, Automotive industry, Soft Computing INTRODUCTION which is depended by coefficient of friction and normal load on the drive axle. Lower limitation Almost all automobiles in use today are driven by is defined by maximal speed that vehicle can internal combustion engines, which are charac- reach. Shaded areas between traction forces terized by many advantages, such as relatively through gears are power losses. To decrease good efficiency, relatively compact energy stor- power losses and to be as closely as possible age and high power – to – weight ratio [07]. to the ideal traction hyperbola, the gearbox with But, fundamental disadvantages are: enough gear ratios is needed. -

Heavy Duty Automatic Transmission & Power Steering Fluid X-Changers
R Transmission fluid (inline or dipstick) and power steering fluid exchanging capabilities! Heavy Duty Automatic Transmission & Power Steering Fluid X-Changers P/N: 98018 P/N: 98020 P/N: 98019 P/N: 98021 TRANSMISSION (INLINE) TRANSMISSION (INLINE) TRANSMISSION TRANSMISSION (INLINE or Transmission fluid & POWER STEERING FLUID (INLINE or DIPSTICK) DIPSTICK) & POWER STEERING exchange through vehicle’s Multi-function service, Multi-method transmission Multi-function service, transmission cooler lines transmission fluid exchange fluid exchange: inline or transmission fluid exchange or patented integrated through the dipstick (inline or dipstick) or power steering exchange patented integrated power steering exchange ALL MACHINES INCLUDE: • Ability to select any fluid exchange • Large 2.5 GPM pump able to handle anything • Patented electronic measuring technology amount from 1 - 35 quarts from low-flow vehicles to trucks & buses • Fluid totalizer • Patented electronic measuring technology • ADD and REMOVE fluid features • Power loss memory • Fully interactive LCD control panel • SWITCH HOSES indicator & the • Pause function shows the technician everything going ability to switch flow direction on, taking out all the guesswork with the push of a button • Large 35 quart tanks 943067 2600 Jeanwood Drive • Elkhart, IN 46514 • Phone: 574-262-3400 • Toll Free: 800-303-5874 • www.flodynamics.com NEW Easy To Use LCD Control Panel! PERFORMANCE-DRIVEN HEAVY DUTY AUTOMATIC TRANSMISSION & POWER STEERING FLUID X-CHANGER BENEFITS Accurate sensor technology allows optimum fluid level to be maintained in vehicle’s transmission. Two in-line 22-micron absolute 1 2 3 + fluid filters capture microscopic ABC DEF ADD particles and contaminants. 4 5 6 _ Easy to use adapters allow quick hookup GHI JKL MNO REMOVE to virtually any automobile make and 7 8 9 model, saving time and money. -

Readout No.42E 08 Feature Article
eature Article Wheel Slip Simulation for Dynamic Road Load Simulation FFeatureApplication Article Application ReprintofReadoutNo.38 Wheel Slip Simulation for Dynamic Road Load Simulation Increasingly stringent fuel economy standards are forcing automobile Bryce Johnson manufacturers to search for efficiency gains in every part of the drive train from engine to road surface. Safety mechanisms such as stability control and anti-lock braking are becoming more sophisticated. At the same time drivers are demanding higher performance from their vehicles. Hybrid transmissions and batteries are appearing in more vehicles. These issues are forcing the automobile manufacturers to require more from their test stands. The test stand must now simulate not just simple vehicle loads such as inertia and windage, but the test stand must also simulate driveline dynamic loads. In the past, dynamic loads could be simulated quite well using Service Load Replication (SLR*1). However, non-deterministic events such as the transmission shifting or application of torque vectoring from an on board computer made SLR unusable for the test. The only way to properly simulate driveline dynamic loads for non- deterministic events is to provide a wheel-tire-road model simulation in addition to vehicle simulation. The HORIBA wheel slip simulation implemented in the SPARC power train controller provides this wheel-tire-road model simulation. *1: Service load replication is a frequency domain transfer function calculation with iterative convergence to a solution. SLR uses field collected, time history format data. Introduction frequency. The frequency will typically manifest itself between 5 and 10 Hz for cars and light trucks. (see To understand why tire-wheel simulation is required, we should first understand the type of driveline dynamics that need to be reproduced on the test stand. -

Inertial Dynamometer for Shell Eco-Marathon Engine: Validation
ICEUBI2019 International Congress on Engineering — Engineering for Evolution Volume 2020 Conference Paper Inertial Dynamometer for Shell Eco-marathon Engine: Validation Daniel Filipe da Silva Cardoso, João Manuel Figueira Neves Amaro, and Paulo Manuel Oliveira Fael Universidade da Beira Interior Abstract This paper aims to validate the construction of an inertia dynamometer. These types of dynamometers allow easy characterization of internal combustion engines. To validate the dynamometer, tests were carried out with the same engine (Honda GX 160) installed in the UBIAN car and kart, which after calculating the inertia and measuring engine acceleration in each test performed, allows to create the torque characteristic curve from the engine. Keywords: Inertia, Dynamometer, Torque, Flywheel, UBIAN Corresponding Author: Daniel Filipe da Silva Cardoso [email protected] Received: 26 November 2019 1. Introduction Accepted: 13 May 2020 Published: 2 June 2020 This work was performed at the University of Beira Interior in order to study the engine Publishing services provided by currently used at UBIAN car. This is a car build by a team that participate in Shell Knowledge E Ecomarathon. The engine used is Honda GX 160 [1]. Daniel Filipe da Silva Cardoso et al. This article is distributed This article intends to focus on demonstrating and validating a simple system of under the terms of the Creative engine characterization. To make this validation three types of tests will be performed: Commons Attribution License, the first one coupling the engine on inertia dynamometer; the second one is done using which permits unrestricted use and redistribution provided that the whole vehicle; a third test, performed on a go kart, will be used as a control test. -

Autodyn Series Brochure
AUTODYN SERIES AUTODYN SERIES CHASSIS DYNAMOMETERS HAND HELD CONTROLLER EDDY CURRENT ABSORBERS VERSATILE Simple and accessible control To simulate real-world driving With upgradeable options and while testing conditions wheel base adjustment We Make It Better 1.262.252.4301 | www.powertestdyno.com | [email protected] | Sussex, WI, USA FEATURES THAT MATTER Push-Button Wheel Base Adjustment Push-button wheel base adjustment is not only convenient; it’s also the right way to accommodate AWD vehicles because it allows the vehicles to be loaded in the same position on the rolls every time. Non-adjustable cradle rolls systems that simply stack rolls together to accommodate AWD vehicles produce inconsistencies in testing as one vehicle might land between rolls and another may land on top of the rolls, creating a different testing environment for each vehicle. Trunnion Mounted Differentials Precision, trunnion mounted differentials allow individual torque measurement of each axle (AWD models) so you can see total torque through the RPM range and also the torque split between the front and rear axles to tune for drivability. They also allow accurate measurement of dyno losses so the inertia of the dyno does not affect the test results. Further, it means SuperFlow® dynos are not susceptible to inaccuracies based on heat in the dyno components like the differentials and couplings. 2 Eddy Current Absorption High capacity eddy current absorbers allow for both inertia and loaded testing. On all models, they’re coupled to each other and to the rolls with positive mechanical couplings like differentials and driveshafts. This allows accurate measurement of parasitic horsepower losses in each individual dyno we manufacture. -

Analysis and Simulation of a Torque Assist Automated Manual Transmission
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by PORTO Publications Open Repository TOrino Post print (i.e. final draft post-refereeing) version of an article published on Mechanical Systems and Signal Processing. Beyond the journal formatting, please note that there could be minor changes from this document to the final published version. The final published version is accessible from here: http://dx.doi.org/10.1016/j.ymssp.2010.12.014 This document has made accessible through PORTO, the Open Access Repository of Politecnico di Torino (http://porto.polito.it), in compliance with the Publisher's copyright policy as reported in the SHERPA- ROMEO website: http://www.sherpa.ac.uk/romeo/issn/0888-3270/ Analysis and Simulation of a Torque Assist Automated Manual Transmission E. Galvagno, M. Velardocchia, A. Vigliani Dipartimento di Meccanica - Politecnico di Torino C.so Duca degli Abruzzi, 24 - 10129 Torino - ITALY email: [email protected] Keywords assist clutch automated manual transmission power-shift transmission torque gap filler drivability Abstract The paper presents the kinematic and dynamic analysis of a power-shift Automated Manual Transmission (AMT) characterised by a wet clutch, called Assist-Clutch (ACL), replacing the fifth gear synchroniser. This torque-assist mechanism becomes a torque transfer path during gearshifts, in order to overcome a typical dynamic problem of the AMTs, that is the driving force interruption. The mean power contributions during gearshifts are computed for different engine and ACL interventions, thus allowing to draw considerations useful for developing the control algorithms. The simulation results prove the advantages in terms of gearshift quality and ride comfort of the analysed transmission. -

Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory Aaron Farley University of Arkansas, Fayetteville
University of Arkansas, Fayetteville ScholarWorks@UARK Theses and Dissertations 5-2012 Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory Aaron Farley University of Arkansas, Fayetteville Follow this and additional works at: http://scholarworks.uark.edu/etd Part of the Electro-Mechanical Systems Commons Recommended Citation Farley, Aaron, "Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory" (2012). Theses and Dissertations. 336. http://scholarworks.uark.edu/etd/336 This Thesis is brought to you for free and open access by ScholarWorks@UARK. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of ScholarWorks@UARK. For more information, please contact [email protected], [email protected]. DESIGN AND IMPLEMENTATION OF A SMALL ELECTRIC MOTOR DYNAMOMETER FOR MECHANICAL ENGINEERING UNDERGRADUATE LABORATORY DESIGN AND IMPLEMENTATION OF A SMALL ELECTRIC MOTOR DYNAMOMETER FOR MECHANICAL ENGINEERING UNDERGRADUATE LABORATORY A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering By Aaron Farley University of Arkansas Bachelor of Science in Mechanical Engineering, 2001 May 2012 University of Arkansas ABSTRACT This thesis set out to design and implement a new experiment for use in the second lab of the laboratory curriculum in the Mechanical Engineering Department at the University of Arkansas in Fayetteville, AR. The second of three labs typically consists of data acquisition and the real world measurements of concepts learned in the classes at the freshman and sophomore level. This small electric motor dynamometer was designed to be a table top lab setup allowing students to familiarize themselves with forces, torques, angular velocity and the sensors used to measure those quantities, i.e. -
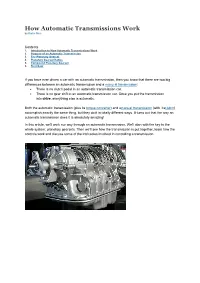
How Automatic Transmissions Work by Karim Nice
How Automatic Transmissions Work by Karim Nice Contents 1. Introduction to How Automatic Transmissions Work 2. Purpose of an Automatic Transmission 3. The Planetary Gearset 4. Planetary Gearset Ratios 5. Compound Planetary Gearset 6. First Gear If you have ever driven a car with an automatic transmission, then you know that there are two big differences between an automatic transmission and a manu al transmission: There is no clutch pedal in an automatic transmission car. There is no gear shift in an automatic transmission car. Once you put the transmission into drive, everything else is automatic. Both the automatic transmission (plus its torque converter) and amanual transmission (with itsclutch) accomplish exactly the same thing, but they do it in totally different ways. It turns out that the way an automatic transmission does it is absolutely amazing! In this article, we'll work our way through an automatic transmission. We'll start with the key to the whole system: planetary gearsets. Then we'll see how the transmission is put together, learn how the controls work and discuss some of the intricacies involved in controlling a transmission. Purpose of an Automatic Transmission Location of the automatic transmission. Just like that of a manual transmission, the automatic transmission's primary job is to allow the engine to operate in its narrow range of speeds while providing a wide range of output speeds. Without a transmission, cars would be limited to one gear ratio, and that ratio would have to be selected to allow the car to travel at the desired top speed. -

Variable Automatic Gearbox Multitronic 01J Self
228 228 Service. Variable Automatic Gearbox multitronic® 01J Design and Function Self-Study Programme 228 All rights reserved. Technical specifications subject to change without notice. AUDI AG Dept. I/VK-5 D-85045 Ingolstadt Fax +49 (0)841/89-36367 940.2810.47.20 Technical status: 09/99 Printed in Germany For internal use only multitronic® The name multitronic® stands for the new The CVT concept improved by Audi is based variable automatic gearbox developed by on the long-established principle of the Audi. “chain drive transmission”. According to this The variable automatic gearbox is commonly principle, the reduction ratio between the known as the CVT gearbox. shortest and the longest ratio can be controlled steplessly by means of a so-called “variator”. CVT is the English abbreviation for “Continuously Variable Transmission”. 228_023 The new Audi multitronic® with Tiptronic function offers a synergy of the best possible dynamics, optimal fuel utilisation and the highest possible level of drive comfort. 2 Contents Page Introduction multitronic® ............................................................................ 2 The gearbox concept .............................................................. 9 Specifications ........................................................................10 Gearbox modules The flywheel damper unit .................................................... 11 Sectional view of gearbox ....................................................13 The forward clutch/reverse clutch with planetary gear train .................................................... -
ECE 40600 Capstone Senior Design Project II 5HP Dynamometer Retrofit
Purdue University Fort Wayne Department of Electrical and Computer Engineering ECE 40600 Capstone Senior Design Project II 5HP Dynamometer Retrofit Shehryar Azam <[email protected]> Benjamin Edwards <[email protected]> Joshua Durham <[email protected]> Matthew Gonzalez <[email protected]> Project Advisor: Dr. Chao Chen<[email protected]> Date: 05/03/2021 1 Table of Contents Acknowledgements . 7 Abstract . 8 1 Problem Statement . 9 1.1 Literature Survey . 9 1.2 Customer-Defined Constraints and Given Requirements . 9 1.3 Customer Needs and Functional Requirements for Design . 10 1.4 Applicable Engineering Standards . 11 1.5 Define Use Cases . 11 1.6 System Boundary . 12 1.7 Interface Requirements and Definitions. 1 4 2 Conceptual Design. 1 5 2.1 Product Design Decomposition (PDD). 1 5 2.2 Decision List. 17 2.3 Conceptual Design of Alternatives – Physical Solutions (PS) Selection . 18 3 Summary of the Evaluation of Design Alternatives. 20 3.1 Criteria for Selection and Testing Among Alternatives. 20 3.2 Evaluation of Software Design Alternatives . 21 3.3 Evaluation of Torque Transducer Alternatives . 22 3.4 Summary of Preliminary Design . .23 4 Detailed Design. 2 4 4.1 Design Description and Drawings . 2 4 4.2 Evaluation. 31 5 Cost Analysis. .. 32 5.1 BOM (Bill of Materials) . .. 32 6 Design Changes. .. 34 6.1 PC Hardware Change . .. 34 2 6.2 BOM Update. 35 6.3 Software Structure Change. 37 7 Building Process . .. 38 7.1 Hardware Construction . .. 38 7.2 Software Implementation. .. 46 7.3 User Interface. .. 51 7.4 Documentation. .. 54 8 Risk Analysis and Test Plan. -

Transmission (Mechanics) - Wikipedia 8/28/20, 1�19 PM
Transmission (mechanics) - Wikipedia 8/28/20, 119 PM Transmission (mechanics) A transmission is a machine in a power transmission system, which provides controlled application of the power. Often the term 5 speed transmission refers simply to the gearbox that uses gears and gear trains to provide speed and torque conversions from a rotating power source to another device.[1][2] In British English, the term transmission refers to the whole drivetrain, including clutch, gearbox, prop shaft (for rear-wheel drive), differential, and final drive shafts. In American English, however, the term refers more specifically to the gearbox alone, and detailed Single stage gear reducer usage differs.[note 1] The most common use is in motor vehicles, where the transmission adapts the output of the internal combustion engine to the drive wheels. Such engines need to operate at a relatively high rotational speed, which is inappropriate for starting, stopping, and slower travel. The transmission reduces the higher engine speed to the slower wheel speed, increasing torque in the process. Transmissions are also used on pedal bicycles, fixed machines, and where different rotational speeds and torques are adapted. Often, a transmission has multiple gear ratios (or simply "gears") with the ability to switch between them as speed varies. This switching may be done manually (by the operator) or automatically. Directional (forward and reverse) control may also be provided. Single-ratio transmissions also exist, which simply change the speed and torque (and sometimes direction) of motor output. In motor vehicles, the transmission generally is connected to the engine crankshaft via a flywheel or clutch or fluid coupling, partly because internal combustion engines cannot run below a particular speed. -

5-Speed Manual Transmission
5-speed Manual Transmission Come to a full stop before you shift into reverse. You can damage the transmission by trying to shift into reverse with the car moving. Depress Rapid slowing or speeding-up the clutch pedal and pause for a few can cause loss of control on seconds before putting it in reverse, slippery surfaces. If you crash, or shift into one of the forward gears you can be injured. for a moment. This stops the gears, so they won't "grind." Use extra care when driving on slippery surfaces. You can get extra braking from the engine when slowing down by shifting to a lower gear. This extra Recommended Shift Points The manual transmission is synchro- braking can help you maintain a safe Drive in the highest gear that lets the nized in all forward gears for smooth speed and prevent your brakes from engine run and accelerate smoothly. operation. It has a lockout so you overheating while going down a This will give you the best fuel cannot shift directly from Fifth to steep hill. Before downshifting, economy and effective emissions Reverse. When shifting up or down, make sure engine speed will not go control. The following shift points are make sure you push the clutch pedal into the red zone in the lower gear. recommended: down all the way, shift to the next Refer to the Maximum Speeds chart. gear, and let the pedal up gradually. When you are not shifting, do not rest your foot on the clutch pedal. This can cause your clutch to wear out faster.