A Sublinear Bound on the Page Number of Upward Planar Graphs
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Space and Polynomial Time Algorithm for Reachability in Directed Layered Planar Graphs
Electronic Colloquium on Computational Complexity, Revision 1 of Report No. 16 (2015) An O(n) Space and Polynomial Time Algorithm for Reachability in Directed Layered Planar Graphs Diptarka Chakraborty∗and Raghunath Tewari y Department of Computer Science and Engineering, Indian Institute of Technology Kanpur, Kanpur, India April 27, 2015 Abstract Given a graph G and two vertices s and t in it, graph reachability is the problem of checking whether there exists a path from s to t in G. We show that reachability in directed layered planar graphs can be decided in polynomial time and O(n ) space, for any > 0. Thep previous best known space bound for this problem with polynomial time was approximately O( n) space [INP+13]. Deciding graph reachability in SC is an important open question in complexity theory and in this paper we make progress towards resolving this question. 1 Introduction Given a graph and two vertices s and t in it, the problem of determining whether there is a path from s to t in the graph is known as the graph reachability problem. Graph reachability problem is an important question in complexity theory. Particularly in the domain of space bounded computa- tions, the reachability problem in various classes of graphs characterize the complexity of different complexity classes. The reachability problem in directed and undirected graphs, is complete for the classes non-deterministic log-space (NL) and deterministic log-space (L) respectively [LP82, Rei08]. The latter follows due to a famous result by Reingold who showed that undirected reachability is in L [Rei08]. -

Confluent Hasse Diagrams
Confluent Hasse diagrams David Eppstein Joseph A. Simons Department of Computer Science, University of California, Irvine, USA. October 29, 2018 Abstract We show that a transitively reduced digraph has a confluent upward drawing if and only if its reachability relation has order dimension at most two. In this case, we construct a confluent upward drawing with O(n2) features, in an O(n) × O(n) grid in O(n2) time. For the digraphs representing series-parallel partial orders we show how to construct a drawing with O(n) fea- tures in an O(n) × O(n) grid in O(n) time from a series-parallel decomposition of the partial order. Our drawings are optimal in the number of confluent junctions they use. 1 Introduction One of the most important aspects of a graph drawing is that it should be readable: it should convey the structure of the graph in a clear and concise way. Ease of understanding is difficult to quantify, so various proxies for readability have been proposed; one of the most prominent is the number of edge crossings. That is, we should minimize the number of edge crossings in our drawing (a planar drawing, if possible, is ideal), since crossings make drawings harder to read. Another measure of readability is the total amount of ink required by the drawing [1]. This measure can be formulated in terms of Tufte’s “data-ink ratio” [22,35], according to which a large proportion of the ink on any infographic should be devoted to information. Thus given two different ways to present information, we should choose the more succinct and crossing-free presentation. -

Masters Thesis: an Approach to the Automatic Synthesis of Controllers with Mixed Qualitative/Quantitative Specifications
An approach to the automatic synthesis of controllers with mixed qualitative/quantitative specifications. Athanasios Tasoglou Master of Science Thesis Delft Center for Systems and Control An approach to the automatic synthesis of controllers with mixed qualitative/quantitative specifications. Master of Science Thesis For the degree of Master of Science in Embedded Systems at Delft University of Technology Athanasios Tasoglou October 11, 2013 Faculty of Electrical Engineering, Mathematics and Computer Science (EWI) · Delft University of Technology *Cover by Orestis Gartaganis Copyright c Delft Center for Systems and Control (DCSC) All rights reserved. Abstract The world of systems and control guides more of our lives than most of us realize. Most of the products we rely on today are actually systems comprised of mechanical, electrical or electronic components. Engineering these complex systems is a challenge, as their ever growing complexity has made the analysis and the design of such systems an ambitious task. This urged the need to explore new methods to mitigate the complexity and to create sim- plified models. The answer to these new challenges? Abstractions. An abstraction of the the continuous dynamics is a symbolic model, where each “symbol” corresponds to an “aggregate” of states in the continuous model. Symbolic models enable the correct-by-design synthesis of controllers and the synthesis of controllers for classes of specifications that traditionally have not been considered in the context of continuous control systems. These include qualitative specifications formalized using temporal logics, such as Linear Temporal Logic (LTL). Be- sides addressing qualitative specifications, we are also interested in synthesizing controllers with quantitative specifications, in order to solve optimal control problems. -

Efficient Graph Reachability Query Answering Using Tree Decomposition
Efficient Graph Reachability Query Answering using Tree Decomposition Fang Wei Computer Science Department, University of Freiburg, Germany Abstract. Efficient reachability query answering in large directed graphs has been intensively investigated because of its fundamental importance in many application fields such as XML data processing, ontology rea- soning and bioinformatics. In this paper, we present a novel indexing method based on the concept of tree decomposition. We show analytically that this intuitive approach is both time and space efficient. We demonstrate empirically the efficiency and the effectiveness of our method. 1 Introduction Querying and manipulating large scale graph-like data has attracted much atten- tion in the database community, due to the wide application areas of graph data, such as GIS, XML databases, bioinformatics, social network, and ontologies. The problem of reachability test in a directed graph is among the fundamental operations on the graph data. Given a digraph G = (V; E) and u; v 2 V , a reachability query, denoted as u ! v, ask: is there a path from u to v? One of the fundamental queries on biological networks is for instance, to find all genes whose expressions are directly or indirectly influenced by a given molecule [15]. Given the graph representation of the genes and regulation events, the question can also be reduced to the reachability query in a directed graph. Recently, tree decomposition methodologies have been successfully applied to solving shortest path query answering over undirected graphs [17]. Briefly stated, the vertices in a graph G are decomposed into a tree in which each node contains a set of vertices in G. -

BOOK EMBEDDINGS of LAMAN GRAPHS 1. Definitions Definition 1
BOOK EMBEDDINGS OF LAMAN GRAPHS MICHELLE DELCOURT, MEGHAN GALIARDI, AND JORDAN TIRRELL Abstract. We explore various techniques to embed planar Laman graphs in books. These graphs can be embedded as pointed pseudo-triangulations and have many interesting properties. We conjecture that all planar Laman graphs can be embedded in two pages. 1. Definitions Definition 1. A graph G with n vertices and m edges is a Laman graph if m = 2n − 3 and every subgraph induced by k vertices (where k > 1) contains at most 2k − 3 edges. Definition 2. A book embedding of a graph G is a drawing with no crossings of G on a book; every edge is mapped to a page (a half-plane), and every vertex is mapped to the spine (the boundary shared by all the half-planes). Definition 3. The book thickness of a graph G, denoted bt(G) also known as page number, is the minimum number of pages needed to book embed G. 2. Finding Book Thickness Using Henneberg Constructions Motivated by Schnyder labelings for triangulations, Huemer and Kappes proposed an analogous binary labeling for quadrangulations which decom- poses the edge set in two directed trees rooted at a sink. A weak version of this labeling is valid for Laman graphs; however, the labeling does not guarantee a decomposition into two trees. The binary labeling of Laman graphs of Huemer and Kappes is based on Henneberg constructions. The Henneberg construction provides a decomposition into two trees whereas the labeling does not. A Henneberg construction consists of two moves: I. Adding a vertex of degree two II. -
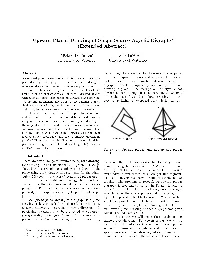
Upward Planar Drawing of Single Source Acyclic Digraphs (Extended
Upward Planar Drawing of Single Source Acyclic Digraphs (Extended Abstract) y z Michael D. Hutton Anna Lubiw UniversityofWaterlo o UniversityofWaterlo o convention, the edges in the diagrams in this pap er Abstract are directed upward unless sp eci cally stated otherwise, An upward plane drawing of a directed acyclic graph is a and direction arrows are omitted unless necessary.The plane drawing of the graph in which each directed edge is digraph on the left is upward planar: an upward plane represented as a curve monotone increasing in the vertical drawing is given. The digraph on the rightisnot direction. Thomassen [14 ] has given a non-algorithmic, upward planar|though it is planar, since placing v graph-theoretic characterization of those directed graphs inside the face f would eliminate crossings, at the with a single source that admit an upward plane drawing. cost of pro ducing a downward edge. Kelly [10] and We present an ecient algorithm to test whether a given single-source acyclic digraph has an upward plane drawing v and, if so, to nd a representation of one suchdrawing. The algorithm decomp oses the graph into biconnected and triconnected comp onents, and de nes conditions for merging the comp onents into an upward plane drawing of the original graph. To handle the triconnected comp onents f we provide a linear algorithm to test whether a given plane drawing admits an upward plane drawing with the same faces and outer face, which also gives a simpler, algorithmic Upward planar Non-upward-planar pro of of Thomassen's result. The entire testing algorithm (for general single-source directed acyclic graphs) op erates 2 in O (n ) time and O (n) space. -
Open Problems on Graph Drawing
Open problems on Graph Drawing Alexandros Angelopoulos Corelab E.C.E - N.T.U.A. February 17, 2014 Outline Introduction - Motivation - Discussion Variants of thicknesses Thickness Geometric thickness Book thickness Bounds Complexity Related problems & future work 2/ Motivation: Air Traffic Management Separation -VerticalVertical - Lateral - Longitudinal 3/ Motivation: Air Traffic Management : Maximization of \free flight” airspace c d c d X f f i1 i4 i0 i2 i3 i5 e e Y a b a b 8 Direct-to flight (as a choice among \free flight") increases the complexity of air traffic patterns Actually... 4 Direct-to flight increases the complexity of air traffic patterns and we have something to study... 4/ Motivation: Air Traffic Management 5/ How to model? { Graph drawing & thicknesses Geometric thickness (θ¯) Book thickness (bt) Dillencourt et al. (2000) Bernhart and Kainen (1979) : only straight lines : convex positioning of nodes v4 v5 v1 v2 θ(G) ≤ θ¯(G) ≤ bt(G) v5 v3 v0 v4 4 v1 Applications in VLSI & graph visualizationv3 Thickness (θ) v0 8 θ, θ¯, bt characterize the graph (minimizations over all allowedv2 drawings) Tutte (1963), \classical" planar decomposition 6/ Geometric graphs and graph drawings Definition 1.1 (Geometric graph, Bose et al. (2006), many Erd¨ospapers). A geometric graph G is a pair (V (G);E(G)) where V (G) is a set of points in the plane in general position and E(G) is set of closed segments with endpoints in V (G). Elements of V (G) are vertices and elements of E(G) are edges, so we can associate this straight-line drawing with the underlying abstract graph G(V; E). -

LNCS 7034, Pp
Confluent Hasse Diagrams DavidEppsteinandJosephA.Simons Department of Computer Science, University of California, Irvine, USA Abstract. We show that a transitively reduced digraph has a confluent upward drawing if and only if its reachability relation has order dimen- sion at most two. In this case, we construct a confluent upward drawing with O(n2)features,inanO(n) × O(n)gridinO(n2)time.Forthe digraphs representing series-parallel partial orders we show how to con- struct a drawing with O(n)featuresinanO(n)×O(n)gridinO(n)time from a series-parallel decomposition of the partial order. Our drawings are optimal in the number of confluent junctions they use. 1 Introduction One of the most important aspects of a graph drawing is that it should be readable: it should convey the structure of the graph in a clear and concise way. Ease of understanding is difficult to quantify, so various proxies for it have been proposed, including the number of crossings and the total amount of ink required by the drawing [1,18]. Thus given two different ways to present information, we should choose the more succinct and crossing-free presentation. Confluent drawing [7,8,9,15,16] is a style of graph drawing in which multiple edges are combined into shared tracks, and two vertices are considered to be adjacent if a smooth path connects them in these tracks (Figure 1). This style was introduced to re- duce crossings, and in many cases it will also Fig. 1. Conventional and confluent improve the ink requirement by represent- drawings of K5,5 ing dense subgraphs concisely. -
Depth-First Search & Directed Graphs
Depth-first Search and Directed Graphs Story So Far • Breadth-first search • Using breadth-first search for connectivity • Using bread-first search for testing bipartiteness BFS (G, s): Put s in the queue Q While Q is not empty Extract v from Q If v is unmarked Mark v For each edge (v, w): Put w into the queue Q The BFS Tree • Can remember parent nodes (the node at level i that lead us to a given node at level i + 1) BFS-Tree(G, s): Put (∅, s) in the queue Q While Q is not empty Extract (p, v) from Q If v is unmarked Mark v parent(v) = p For each edge (v, w): Put (v, w) into the queue Q Spanning Trees • Definition. A spanning tree of an undirected graph G is a connected acyclic subgraph of G that contains every node of G . • The tree produced by the BFS algorithm (with (( u, parent(u)) as edges) is a spanning tree of the component containing s . • The BFS spanning tree gives the shortest path from s to every other vertex in its component (we will revisit shortest path in a couple of lectures) • BFS trees in general are short and bushy Spanning Trees • Definition. A spanning tree of an undirected graph G is a connected acyclic subgraph of G that contains every node of G . • The tree produced by the BFS algorithm (with (( u, parent(u)) as edges) is a spanning tree of the component containing s . • The BFS spanning tree gives the shortest path from s to every other vertex in its component (we will revisit shortest path in a couple of lectures) • BFS trees in general are short and bushy Generalizing BFS: Whatever-First If we change how we store -

Local Page Numbers
Local Page Numbers Bachelor Thesis of Laura Merker At the Department of Informatics Institute of Theoretical Informatics Reviewers: Prof. Dr. Dorothea Wagner Prof. Dr. Peter Sanders Advisor: Dr. Torsten Ueckerdt Time Period: May 22, 2018 – September 21, 2018 KIT – University of the State of Baden-Wuerttemberg and National Laboratory of the Helmholtz Association www.kit.edu Statement of Authorship I hereby declare that this document has been composed by myself and describes my own work, unless otherwise acknowledged in the text. I declare that I have observed the Satzung des KIT zur Sicherung guter wissenschaftlicher Praxis, as amended. Ich versichere wahrheitsgemäß, die Arbeit selbstständig verfasst, alle benutzten Hilfsmittel vollständig und genau angegeben und alles kenntlich gemacht zu haben, was aus Arbeiten anderer unverändert oder mit Abänderungen entnommen wurde, sowie die Satzung des KIT zur Sicherung guter wissenschaftlicher Praxis in der jeweils gültigen Fassung beachtet zu haben. Karlsruhe, September 21, 2018 iii Abstract A k-local book embedding consists of a linear ordering of the vertices of a graph and a partition of its edges into sets of edges, called pages, such that any two edges on the same page do not cross and every vertex has incident edges on at most k pages. Here, two edges cross if their endpoints alternate in the linear ordering. The local page number pl(G) of a graph G is the minimum k such that there exists a k-local book embedding for G. Given a graph G and a vertex ordering, we prove that it is NP-complete to decide whether there exists a k-local book embedding for G with respect to the given vertex ordering for any fixed k ≥ 3. -

Upward Planar Drawings with Three Slopes
Upward Planar Drawings with Three and More Slopes Jonathan Klawitter and Johannes Zink Universit¨atW¨urzburg,W¨urzburg,Germany Abstract. We study upward planar straight-line drawings that use only a constant number of slopes. In particular, we are interested in whether a given directed graph with maximum in- and outdegree at most k admits such a drawing with k slopes. We show that this is in general NP-hard to decide for outerplanar graphs (k = 3) and planar graphs (k ≥ 3). On the positive side, for cactus graphs deciding and constructing a drawing can be done in polynomial time. Furthermore, we can determine the minimum number of slopes required for a given tree in linear time and compute the corresponding drawing efficiently. Keywords: upward planar · slope number · NP-hardness 1 Introduction One of the main goals in graph drawing is to generate clear drawings. For visualizations of directed graphs (or digraphs for short) that model hierarchical relations, this could mean that we explicitly represent edge directions by letting each edge point upward. We may also require a planar drawing and, if possible, we would thus get an upward planar drawing. For schematic drawings, we try to keep the visual complexity low, for example by using only few different geometric primitives [28] { in our case few slopes for edges. If we allow two different slopes we get orthogonal drawings [14], with three or four slopes we get hexalinear and octilinear drawings [36], respectively. Here, we combine these requirements and study upward planar straight-line drawings that use only few slopes. -

An Efficient Reachability Indexing Scheme for Large Directed Graphs
1 Path-Tree: An Efficient Reachability Indexing Scheme for Large Directed Graphs RUOMING JIN, Kent State University NING RUAN, Kent State University YANG XIANG, The Ohio State University HAIXUN WANG, Microsoft Research Asia Reachability query is one of the fundamental queries in graph database. The main idea behind answering reachability queries is to assign vertices with certain labels such that the reachability between any two vertices can be determined by the labeling information. Though several approaches have been proposed for building these reachability labels, it remains open issues on how to handle increasingly large number of vertices in real world graphs, and how to find the best tradeoff among the labeling size, the query answering time, and the construction time. In this paper, we introduce a novel graph structure, referred to as path- tree, to help labeling very large graphs. The path-tree cover is a spanning subgraph of G in a tree shape. We show path-tree can be generalized to chain-tree which theoretically can has smaller labeling cost. On top of path-tree and chain-tree index, we also introduce a new compression scheme which groups vertices with similar labels together to further reduce the labeling size. In addition, we also propose an efficient incremental update algorithm for dynamic index maintenance. Finally, we demonstrate both analytically and empirically the effectiveness and efficiency of our new approaches. Categories and Subject Descriptors: H.2.8 [Database management]: Database Applications—graph index- ing and querying General Terms: Performance Additional Key Words and Phrases: Graph indexing, reachability queries, transitive closure, path-tree cover, maximal directed spanning tree ACM Reference Format: Jin, R., Ruan, N., Xiang, Y., and Wang, H.