(2) Author: Dr. Brian Glass Nati
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

How a Cartoon Series Helped the Public Care About Rosetta and Philae 13 How a Cartoon Series Helped the Public Care About Rosetta and Philae
How a Cartoon Series Helped the Public Care about Best Practice Rosetta and Philae Claudia Mignone Anne-Mareike Homfeld Sebastian Marcu Vitrociset Belgium for European Space ATG Europe for European Space Design & Data GmbH Agency (ESA) Agency (ESA) [email protected] [email protected] [email protected] Carlo Palazzari Emily Baldwin Markus Bauer Design & Data GmbH EJR-Quartz for European Space Agency (ESA) European Space Agency (ESA) [email protected] [email protected] [email protected] Keywords Karen S. O’Flaherty Mark McCaughrean Outreach, space science, public engagement, EJR-Quartz for European Space Agency (ESA) European Space Agency (ESA) visual storytelling, fairy-tale, cartoon, animation, [email protected] [email protected] anthropomorphising Once upon a time... is a series of short cartoons1 that have been developed as part of the European Space Agency’s communication campaign to raise awareness about the Rosetta mission. The series features two anthropomorphic characters depicting the Rosetta orbiter and Philae lander, introducing the mission story, goals and milestones with a fairy- tale flair. This article explores the development of the cartoon series and the level of engagement it generated, as well as presenting various issues that were encountered using this approach. We also examine how different audiences responded to our decision to anthropomorphise the spacecraft. Introduction internet before the spacecraft came out of exciting highlights to come, using the fairy- hibernation (Bauer et al., 2016). The four tale narrative as a base. The hope was that In late 2013, the European Space Agency’s short videos were commissioned from the video would help to build a degree of (ESA) team of science communicators the cross-media company Design & Data human empathy between the public and devised a number of outreach activ- GmbH (D&D). -

Balloon Powered Phoenix Mars Lander Model (Simplified Version)
balloon powered Phoenix Mars Lander Model (simplified version) by Steve Widmark Mountain View High School, Mountain View, CA What is Phoenix? Phoenix is NASA’s latest mission to Mars. Launched on a Delta II rocket on August 4 th , 2007, the Phoenix lander will touch down in the northern region of Mars on May 25, 2008. Once there, it will dig into the Martian permafrost using a robotic arm and analyze the composition of the soil and ice it removes with a sophisticated automated laboratory. In a nutshell, the goal of the mission is to determine if the Martian surface is (or was) capable of supporting life. Unlike the previous rover missions to Mars that made bounce landings using air bags, Phoenix will make a powered landing employing twelve thrusters positioned around the spacecraft. The model demonstrates this method of landing with a single balloon “thruster.” For more information about the Phoenix mission go to http://phoenix.lpl.arizona.edu Materials and tools: 1 parts sheet color printed on 110 lb (#110) card stock 1 balloon (lander flies best with a 5” balloon) 1 small paper clip clear tape glue sick or white glue scissors pencil Directions: Note: If the directions tell you to bend a tab down, this means to bend the tab down with the printed portion of the part facing up. If the directions tell you to bend a tab up, this means to bend the tab up with the printed portion of the part facing up. The front side of a part is the side with the printing. -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -

First Year of Coordinated Science Observations by Mars Express and Exomars 2016 Trace Gas Orbiter
MANUSCRIPT PRE-PRINT Icarus Special Issue “From Mars Express to ExoMars” https://doi.org/10.1016/j.icarus.2020.113707 First year of coordinated science observations by Mars Express and ExoMars 2016 Trace Gas Orbiter A. Cardesín-Moinelo1, B. Geiger1, G. Lacombe2, B. Ristic3, M. Costa1, D. Titov4, H. Svedhem4, J. Marín-Yaseli1, D. Merritt1, P. Martin1, M.A. López-Valverde5, P. Wolkenberg6, B. Gondet7 and Mars Express and ExoMars 2016 Science Ground Segment teams 1 European Space Astronomy Centre, Madrid, Spain 2 Laboratoire Atmosphères, Milieux, Observations Spatiales, Guyancourt, France 3 Royal Belgian Institute for Space Aeronomy, Brussels, Belgium 4 European Space Research and Technology Centre, Noordwijk, The Netherlands 5 Instituto de Astrofísica de Andalucía, Granada, Spain 6 Istituto Nazionale Astrofisica, Roma, Italy 7 Institut d'Astrophysique Spatiale, Orsay, Paris, France Abstract Two spacecraft launched and operated by the European Space Agency are currently performing observations in Mars orbit. For more than 15 years Mars Express has been conducting global surveys of the surface, the atmosphere and the plasma environment of the Red Planet. The Trace Gas Orbiter, the first element of the ExoMars programme, began its science phase in 2018 focusing on investigations of the atmospheric composition with unprecedented sensitivity as well as surface and subsurface studies. The coordination of observation programmes of both spacecraft aims at cross calibration of the instruments and exploitation of new opportunities provided by the presence of two spacecraft whose science operations are performed by two closely collaborating teams at the European Space Astronomy Centre (ESAC). In this paper we describe the first combined observations executed by the Mars Express and Trace Gas Orbiter missions since the start of the TGO operational phase in April 2018 until June 2019. -

Insight Spacecraft Launch for Mission to Interior of Mars
InSight Spacecraft Launch for Mission to Interior of Mars InSight is a robotic scientific explorer to investigate the deep interior of Mars set to launch May 5, 2018. It is scheduled to land on Mars November 26, 2018. It will allow us to better understand the origin of Mars. First Launch of Project Orion Project Orion took its first unmanned mission Exploration flight Test-1 (EFT-1) on December 5, 2014. It made two orbits in four hours before splashing down in the Pacific. The flight tested many subsystems, including its heat shield, electronics and parachutes. Orion will play an important role in NASA's journey to Mars. Orion will eventually carry astronauts to an asteroid and to Mars on the Space Launch System. Mars Rover Curiosity Lands After a nine month trip, Curiosity landed on August 6, 2012. The rover carries the biggest, most advanced suite of instruments for scientific studies ever sent to the martian surface. Curiosity analyzes samples scooped from the soil and drilled from rocks to record of the planet's climate and geology. Mars Reconnaissance Orbiter Begins Mission at Mars NASA's Mars Reconnaissance Orbiter launched from Cape Canaveral August 12. 2005, to find evidence that water persisted on the surface of Mars. The instruments zoom in for photography of the Martian surface, analyze minerals, look for subsurface water, trace how much dust and water are distributed in the atmosphere, and monitor daily global weather. Spirit and Opportunity Land on Mars January 2004, NASA landed two Mars Exploration Rovers, Spirit and Opportunity, on opposite sides of Mars. -

The Phoenix GPS Receiver - a Practical Example of the Successful Application of a COTS-Based Navigation Sensor in Different Space Missions
DLR.de • Chart 1 > WiSEE / REWA > M. Markgraf • Phoenix GPS > 12.10.2020 The Phoenix GPS Receiver - A Practical Example of the Successful Application of a COTS-Based Navigation Sensor in Different Space Missions M. Markgraf ([email protected]) DLR/GSOC, Oberpfaffenhofen, D-82230 Wessling, Germany DLR.de • Chart 2 > WiSEE / REWA > M. Markgraf • Phoenix GPS > 12.10.2020 Content ▪ Background and Motivation ▪ Phoenix GPS Receiver ▪ Qualification and Test Program ▪ Environmental Testing ▪ Vibration & Shock ▪ Thermal-Vacuum ▪ Radiation ▪ Performance Testing ▪ Flight Heritage ▪ Proba-2 Mission ▪ Overview and GPS System Architecture ▪ Flight Result ▪ Radiation Effects ▪ Summary and Conclusions DLR.de • Chart 3 > WiSEE / REWA > M. Markgraf • Phoenix GPS > 12.10.2020 Background and Motivation • GPS has become a „standard“ sensor in almost every space mission over the last two decades • Fully space-qualified GNSS receivers are expansive (>1M€) - unaffordable for many projects due to limited budgets • COTS-based GPS receivers are typically the only alternative for such missions • However, use of COTS-based technology requires thorough testing and good understanding of reliability and failure mechanisms • DLR designs, builds and operates satellites and sounding rockets • Strong in-house need for affordable GPS/GNSS technology • DLR’s Space Flight Technology group commenced to explore, develop, and test COTS-based GPS receiver in the late 1990s. • Phoenix GPS receiver for space missions as an outcome of these works DLR.de • Chart 4 > WiSEE / REWA > M. Markgraf • Phoenix GPS > 12.10.2020 Phoenix GPS Receiver - Hardware 75mm • 12 channel L1 single-frequency receiver for high-dynamics applications • Entirely based on COTS technology 50mm • Commercial H/W platform (SigTec MG5001) • Ca. -
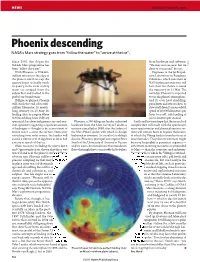
Phoenix Descending NASA’S Mars Strategy Goes from “Follow the Water” to “Arrive at the Ice”
NEWS NATURE|Vol 453|8 May 2008 Phoenix descending NASA’s Mars strategy goes from “follow the water” to “arrive at the ice”. Since 2001, the slogan for from hardware and software. NASA’s Mars programme has “We may not succeed, but we NASA been “follow the water”. deserve to succeed,” he says. With Phoenix, a US$420- Engineers at the Jet Propul- million mission to the edge of sion Laboratory in Pasadena, the planet’s north ice cap, the California, which runs most of agency hopes to finally touch NASA’s planetary missions, will its quarry, in the form of dirty have their last chance to tweak water ice scraped from the the trajectory on 24 May. The subsurface and melted in the next day, Phoenix is expected probe’s on-board ovens. to use the planet’s atmosphere, If all goes as planned, Phoenix and its own heat shielding, will reach the end of its 680- parachutes and retrorockets, to million-kilometre, 10-month- slow itself down from an orbital long journey on 25 May. Its speed of 20,000 kilometres per landing site is in a region where hour to a soft, safe landing at NASA’s orbiting Mars Odyssey just 2.4 metres per second. spacecraft has detected gamma-ray and neu- Phoenix, a 350-kilogram lander, inherited Smith and his team hope that the ice and soil tron signatures suggesting a significant amount hardware from the Mars Surveyor Lander, a samples they will study with the spacecraft’s of hydrogen — thought to be a constituent of mission cancelled in 2000 after the failure of mass-spectrometer and chemical analysis sys- frozen water — near the surface. -

A Review of Sample Analysis at Mars-Evolved Gas Analysis Laboratory Analog Work Supporting the Presence of Perchlorates and Chlorates in Gale Crater, Mars
minerals Review A Review of Sample Analysis at Mars-Evolved Gas Analysis Laboratory Analog Work Supporting the Presence of Perchlorates and Chlorates in Gale Crater, Mars Joanna Clark 1,* , Brad Sutter 2, P. Douglas Archer Jr. 2, Douglas Ming 3, Elizabeth Rampe 3, Amy McAdam 4, Rafael Navarro-González 5,† , Jennifer Eigenbrode 4 , Daniel Glavin 4 , Maria-Paz Zorzano 6,7 , Javier Martin-Torres 7,8, Richard Morris 3, Valerie Tu 2, S. J. Ralston 2 and Paul Mahaffy 4 1 GeoControls Systems Inc—Jacobs JETS Contract at NASA Johnson Space Center, Houston, TX 77058, USA 2 Jacobs JETS Contract at NASA Johnson Space Center, Houston, TX 77058, USA; [email protected] (B.S.); [email protected] (P.D.A.J.); [email protected] (V.T.); [email protected] (S.J.R.) 3 NASA Johnson Space Center, Houston, TX 77058, USA; [email protected] (D.M.); [email protected] (E.R.); [email protected] (R.M.) 4 NASA Goddard Space Flight Center, Greenbelt, MD 20771, USA; [email protected] (A.M.); [email protected] (J.E.); [email protected] (D.G.); [email protected] (P.M.) 5 Institito de Ciencias Nucleares, Universidad Nacional Autonoma de Mexico, Mexico City 04510, Mexico; [email protected] 6 Centro de Astrobiología (INTA-CSIC), Torrejon de Ardoz, 28850 Madrid, Spain; [email protected] 7 Department of Planetary Sciences, School of Geosciences, University of Aberdeen, Aberdeen AB24 3FX, UK; [email protected] 8 Instituto Andaluz de Ciencias de la Tierra (CSIC-UGR), Armilla, 18100 Granada, Spain Citation: Clark, J.; Sutter, B.; Archer, * Correspondence: [email protected] P.D., Jr.; Ming, D.; Rampe, E.; † Deceased 28 January 2021. -

Dr. Luther Beegle, Principal Investigator of the Mars
HOLD FOR RELEASE UNTIL PRESENTED BY WITNESS April 29, 2021 Statement of Dr. Luther Beegle Principal Investigator, SHERLOC on Mars 2020 Principal Scientist Jet Propulsion Laboratory before the Subcommittee on Space and Aeronautics Committee on Science, Space, and Technology U. S. House of Representatives Chairman Beyer, Ranking Member Babin, and members of the Subcommittee, I am honored to appear before this Subcommittee on behalf of the California Institute of Technology to discuss the Mars Perseverance Mission. The Mars 2020/Perseverance Mission On February 18, 2021, the Perseverance rover touched down in Mars’ Jezero Crater. Roughly 3.5 billion years ago, Jezero Crater was the site of an ancient lake. Rivers flowed both into and out of its basin over an extended period of time. Orbital imagery shows that Perseverance has in fact landed right in front of what was once a river delta. Places like this can concentrate biological activity and are known to be an excellent source of preservation of organic molecules, and we have high hopes for what this location may hold for science. The Mars 2020 mission has four science goals: 1) Explore an ancient Martian environment of astrobiological relevance and decipher its geological processes and history, including past habitability; 2) Assess the biosignature preservation potential within that geological environment and search for them; 3) Make progress toward returning scientifically selected, well-documented samples from Mars to Earth; and 4) Provide an opportunity to contribute to future human missions to Mars. Of course, inspiration is always part of the mission. Perseverance has captured the public’s excitement and imagination through the images returned from the surface; the incredible videos of the entry, descent and landing phase; and, most recently, the highly anticipated flight of the Ingenuity helicopter. -
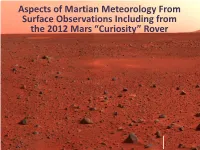
Dynamical Meteorology of the Martian Atmosphere
Aspects of Martian Meteorology From SurfaceDynamical Observations Meteorology Including of from the the Martian2012 Mars Atmosphere “Curiosity” Rover Mars Science Laboratory Curiosity The “Curiosity” rover in clean room at JPL Mars Science Laboratory Curiosity Mars Science Laboratory Curiosity Mars Science Laboratory Curiosity Outline • Basics – orbit, topography, atmospheric composition • Basics – dust, dust everywhere • History of Mars planetary missions 1962-today • Satellite measurments of atmospheric temperature • Surface T, P and u,v observations • Pressure record – annual cycle, baroclinic waves • Pressure record – diurnal variations (atmospheric tides) • Mars General Circulation Models (GCMs) • Model simulations of atmospheric tides • I am curious about Curiosity! Mars orbit and annual cycle • Measure time through the year (or position through the o orbit) by Ls (“Areocentric longitude”) (defined so that Ls=0 is NH spring equinox “March 21”) • Aphelion 249,209,300 km • Perihelion 206,669,000 km o • Ls of perihelion 250 - late SH spring Mars orbit and annual cycle • Measure time through the year (or position through the o orbit) by Ls (“Areocentric longitude”) (defined so that Ls=0 is NH spring equinox “March 21”) 2 2 Ra /Rp = 1.42 (vs. 1.07 for Earth) • Aphelion 249,209,300 km • Perihelion 206,669,000 km o • Ls of perihelion 250 - late SH spring CO2 Ice Cap Helas Basin Tharsus Rise Helas Basin Equatorial section through smoothed topography Equatorial section through smoothed topography Zonal wavenumber 2 topography • 1962 Mars -

Research Paper a Concept for NASA's Mars 2016 Astrobiology
ASTROBIOLOGY Volume 7, Number 4, 2007 © Mary Ann Liebert, Inc. DOI: 10.1089/ast.2007.0153 Research Paper A Concept for NASA’s Mars 2016 Astrobiology Field Laboratory LUTHER W. BEEGLE, MICHAEL G. WILSON, FERNANDO ABILLEIRA, JAMES F. JORDAN, and GREGORY R. WILSON ABSTRACT The Mars Program Plan includes an integrated and coordinated set of future candidate mis- sions and investigations that meet fundamental science objectives of NASA and the Mars Ex- ploration Program (MEP). At the time this paper was written, these possible future missions are planned in a manner consistent with a projected budget profile for the Mars Program in the next decade (2007–2016). As with all future missions, the funding profile depends on a number of factors that include the exact cost of each mission as well as potential changes to the overall NASA budget. In the current version of the Mars Program Plan, the Astrobiology Field Laboratory (AFL) exists as a candidate project to determine whether there were (or are) habitable zones and life, and how the development of these zones may be related to the over- all evolution of the planet. The AFL concept is a surface exploration mission equipped with a major in situ laboratory capable of making significant advancements toward the Mars Pro- gram’s life-related scientific goals and the overarching Vision for Space Exploration. We have developed several concepts for the AFL that fit within known budget and engineering con- straints projected for the 2016 and 2018 Mars mission launch opportunities. The AFL mission architecture proposed here assumes maximum heritage from the 2009 Mars Science Labora- tory (MSL). -

Hi, This Is Steve Nerlich from Cheap Astronomy and This Is Fobos-Grunt
Hi, this is Steve Nerlich from Cheap Astronomy www.cheapastro.com and this is Fobos-Grunt. Cheap Astronomy originally did a podcast on the Fobos-Grunt mission in 2009, it didn’t make the launch window – so now it’s scheduled for a late 2011, early 2012 launch window. Launch windows to Mars come around once every 26 months. If Fobos-Grunt doesn’t launch this time there will be another 26 months wait until early 2014. This is all because Mars has a 687 day solar orbit, which is close to, though not quite twice the time that of Earth’s solar orbit. This means there’s only one opportunity, when the two planets are in just the right spots to launch a spacecraft, give it a bit of a push up the Sun’s gravity well to Mars’ orbit, just at the right time that Mars is passing by that particular point. The recent history of launches to Mars reads like this: in 2007, the highly successful though now ice-entombed Phoenix mission launched; in 2005 the fabulous Mars Reconnaissance Orbiter launched; in 2003, there was Europe’s Mars Express and its lander Beagle 2, which kind of crashed, and of course Spirit and Opportunity, the Mars rovers; in 2001 Mars Odyssey was launched, a trusty workhorse still in operation today, that amongst other things can relay signals from a Mars rover. If you use the Mars launch window, the travel time to Mars is around 7 to 10 months. Alternatively, you could launch at a different time and perhaps try to pursue Mars around its orbit, in which it moves at 24 kilometres a second.