Optimization of Autogyro for Preliminary Development of Personal Flying Vehicle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

215293694.Pdf
EFFECTS OF A WINGTIP-MOUNTED PROPELLER ON WING LIFT, INDUCED DRAG, AND SHED VORTEX PATTERN By MELVIN H. SNYDER, JR. II Bachelor of Science in Mechanical Engineering Carnegie Institute of Technology Pittsburgh, Pennsylvania 1947 Master of Science in Aeronautical Engineering Wichita State University Wichita, Kansas 1950 Submitted to the Faculty of the Graduate College of the Oklahoma State University in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY May, 1967 OKLAHOMA STATE UNIVERSrrf LIBRARY JAN 18 1968 EFFECTS OF A WINGTIP-MOUNTED PROPELLER·· --..-.- --., ON WING LIFT, INDUCED DRAG, AND SHED VORTEX PATTERN Thesis Approved: Deanoa~ of the Graduate College 660169 ii PREFACE The subject of induced drag is one that is both intriguing and frustrating to an aerodynamicist. It is the penalty that must be paid for producing lift using a wing having a finite span. Induced drag is drag that would be present even in a perfect (inviscid) fluid. Also present is the trailing vortex which produces the induced drag. It was desired to determine whether it was possible to combine the swirling of a propeller slipstream with the trailing wing vortex in ways such that the wing loading would be affected and the induced drag either increased or decreased. This paper reports the results of a wind tunnel testing program designed to examine this idea. Indebtedness is acknowledged to the National Science Foundation for the financial support through a Science Faculty Fellowship, which made possible graduate study at Oklahoma State University. Acknowledgement is gratefully made of the guidance and encouragement of Dr. G. W. -
Shipboard Operations
FM 1-564 SHIPBOARD OPERATIONS HEADQUARTERS, DEPARTMENT OF THE ARMY DISTRIBUTION RESTRICTION: Approved for public release; distribution is unlimited. Field Manual *FM1-564 No. 1-564 Headquarters Department of the Army Washington, DC, 29 June 1997 SHIPBOARD OPERATIONS Contents PREFACE CHAPTER 1. PREDEPLOYMENT PLANNING Section 1. Mission Analysis 1-1. Preparation 1-1 1-2. Mission Definition 1-1 1-3. Shipboard Helicopter Training Requirements 1-2 1-4. Service Responsibilities 1-2 1-5. Logistics 1-3 Section 2. Presail Conference 1-6. Coordination 1-7 1-7. Number of Army Aircraft on Board the Ship 1-7 1-8. Checklist 1-7 Section 3. Training Requirements 1-9. Aircrew Requirements for Training 1-9 1-10. Ground School Training 1-11 1-11. Initial Qualification and Currency Requirements 1-11 1-12. Ship Certification and Waiver 1-15 1-13. Detachment Certification 1-15 CHAPTER 2. PREPARATION FOR FLIGHT OPERATIONS Section 1. Chain of Command 2-1. Command Relationship 2-1 2-2. Special Operations 2-2 2-3. Augmentation Support 2-2 Section 2. Personnel Responsibilities 2-4. Flight Quarters Stations 2-3 2-5. Landing Signal Enlisted 2-4 DISTRIBUTION RESTRICTION: Approved for public release; distribution is unlimited. i Section 3. Aircraft Handling 2-6. Fundamentals 2-4 2-7. Helicopter Recovery Tie-Down Procedures 2-5 Section 4. The Air Plan 2-8. Scope 2-5 2-9. Contents 2-6 2-10. Maintenance Test Flights 2-7 2-11. Flight Plan 2-7 2-12. Aqueous Film-Forming Foam System and Mobile Firefighting Equipment 2-7 CHAPTER 3. -

A Numerical Approach for Implementing Air Intakes in a Canard Type Aircraft for Engine Cooling Purposes
https://doi.org/10.1590/jatm.v13.1192 ORIGINAL PAPER A Numerical Approach for Implementing Air Intakes in a Canard Type Aircraft for Engine Cooling Purposes Odenir de Almeida1,* , Pedro Correa Souza1 , Erick Cunha2 1.Universidade Federal de Uberlândia – Faculdade de Engenharia Mecânica – Centro de Pesquisa em Aerodinâmica Experimental – Uberlândia/MG – Brazil. 2.Fábrica Brasileira de Aeronaves – Uberlândia/MG – Brazil *Corresponding author: [email protected] ABSTRACT This work presents selected results of an unconventional aircraft development campaign. Engine installation at the rear part of the fuselage imposed design constraints for air intakes that should be used for cooling purposes. Trial and error flight tests increased the development cost and time which required a more sophisticated analysis through computational fluid dynamics (CFD) techniques and robust semiempirical approach. The carried-out investigation of the air intakes started with an empirical approach from guidelines for designing NACA and scoops. Numerical studies via computational fluid dynamics were performed with the air intakes installed in the aircraft fuselage. An analysis based on the air intake efficiency, drag and the effect of angle of attack are detailed in this work. Different air intakes designs, such as scoops of different shapes, were evaluated seeking for improved air intake efficiency and low drag while providing enough air for cooling the engine compartment. The results showed that the numerical approach used herein decreased the development cost and time of the aircraft, providing a reasonable low-cost approach and leading to a design selection more easily. Based on the current approach the canard airplane geometry was changed to account for the new selected air intake for engine cooling purposes. -
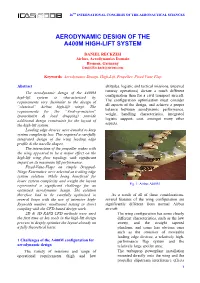
Aerodynamic Design of the A400m High-Lift System
26TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES AERODYNAMIC DESIGN OF THE A400M HIGH-LIFT SYSTEM DANIEL RECKZEH Airbus, Aerodynamics Domain Bremen, Germany [email protected] Keywords: Aerodynamic Design, High-Lift, Propeller, Fixed Vane Flap Abstract altitudes, logistic and tactical missions, unpaved runway operations) dictate a much different The aerodynamic design of the A400M configuration than for a civil transport aircraft. high-lift system is characterized by The configuration optimisation must consider requirements very dissimilar to the design of all aspects of the design, and achieve a proper “classical” Airbus high-lift wings. The balance between aerodynamic performance, requirements for the “Airdrop-mission” weight, handling characteristics, integrated (parachutist & load dropping) provide logistic support, cost, amongst many other additional design constraints for the layout of aspects. the high-lift system. Leading edge devices were avoided to keep system complexity low. This required a carefully integrated design of the wing leading edge profile & the nacelle shapes. The interaction of the propeller wakes with the wing appeared to be a major effect on the high-lift wing flow topology with significant impact on its maximum lift performance. Fixed-Vane-Flaps on simple Dropped- Hinge Kinematics were selected as trailing edge system solution. While being beneficial for lower system complexity and weight the layout represented a significant challenge for an Fig. 1: Airbus A400M optimised aerodynamic design. The solution therefore had to be carefully optimised in As a result of all of these considerations, several loops with the use of intensive high- several features of the wing configuration are Reynolds number windtunnel testing in direct significantly different from normal Airbus coupling with the CFD-based design work. -
Shipboard Operations
FM 1-564 SHIPBOARD OPERATIONS HEADQUARTERS, DEPARTMENT OF THE ARMY DISTRIBUTION RESTRICTION: Approved for public release; distribution is unlimited. Field Manual *FM1-564 No. 1-564 Headquarters Department of the Army Washington, DC, 29 June 1997 SHIPBOARD OPERATIONS Contents PREFACE CHAPTER 1. PREDEPLOYMENT PLANNING Section 1. Mission Analysis 1-1. Preparation 1-1 1-2. Mission Definition 1-1 1-3. Shipboard Helicopter Training Requirements 1-2 1-4. Service Responsibilities 1-2 1-5. Logistics 1-3 Section 2. Presail Conference 1-6. Coordination 1-7 1-7. Number of Army Aircraft on Board the Ship 1-7 1-8. Checklist 1-7 Section 3. Training Requirements 1-9. Aircrew Requirements for Training 1-9 1-10. Ground School Training 1-11 1-11. Initial Qualification and Currency Requirements 1-11 1-12. Ship Certification and Waiver 1-15 1-13. Detachment Certification 1-15 CHAPTER 2. PREPARATION FOR FLIGHT OPERATIONS Section 1. Chain of Command 2-1. Command Relationship 2-1 2-2. Special Operations 2-2 2-3. Augmentation Support 2-2 Section 2. Personnel Responsibilities 2-4. Flight Quarters Stations 2-3 2-5. Landing Signal Enlisted 2-4 DISTRIBUTION RESTRICTION: Approved for public release; distribution is unlimited. i Section 3. Aircraft Handling 2-6. Fundamentals 2-4 2-7. Helicopter Recovery Tie-Down Procedures 2-5 Section 4. The Air Plan 2-8. Scope 2-5 2-9. Contents 2-6 2-10. Maintenance Test Flights 2-7 2-11. Flight Plan 2-7 2-12. Aqueous Film-Forming Foam System and Mobile Firefighting Equipment 2-7 CHAPTER 3. -

Modelling the Propeller Slipstream Effect on the Longitudinal Stability and Control
Modelling the Propeller Slipstream Effect on the Longitudinal Stability and Control Thijs Bouquet Technische Universiteit Delft MODELLINGTHE PROPELLER SLIPSTREAM EFFECT ON THE LONGITUDINAL STABILITY AND CONTROL by Thijs Bouquet in partial fulfillment of the requirements for the degree of Master of Science in Aerospace Engineering at the Delft University of Technology, to be defended publicly on Friday January 22, 2016 at 1:30 PM. Supervisors: Prof. dr. ir. L. L. M. Veldhuis Dr. ir. R. Vos Thesis committee: Dr. ir. E. van Kampen TU Delft An electronic version of this thesis is available at http://repository.tudelft.nl/. Thesis registration number: 069#16#MT#FPP ACKNOWLEDGEMENTS This thesis marks the conclusion of my time as a student at the faculty of Aerospace Engineering of Delft Uni- versity of Technology. This was no small feat, which could not have been done without the help of others, I would therefore like to express my gratitude. First of all, I would like to thank my supervisors, Dr.ir.Roelof Vos and Prof.dr.ir.Leo Veldhuis, for their guid- ance, support and feedback throughout the past year. Secondly, I would like to thank Dr.ir.Erik-Jan van Kam- pen for being a part of my thesis committee. I would also like to thank my friends and colleagues for their support. A special mention has to be made for the students of ’Kamertje-1’, whose mutual goals created a sense of camaraderie which motivated me greatly. Finally, I would like to thank my family, who were never more than a phone call away to support and en- courage me throughout my entire education. -

FY 06 Aviation Accident Review
DOIDOI FYFY 0606 AviationAviation MishapsMishaps 44 AircraftAircraft AccidentsAccidents TheThe lossloss ofof oneone lifelife OneOne serious,serious, andand threethree minorminor injuriesinjuries 1212 IncidentsIncidents withwith PotentialPotential DOIDOI FYFY 0606 AviationAviation MishapsMishaps NTSB 831.13 Flow and dissemination of accident or incident information. (b) … Parties to the investigation may relay to their respective organizations information necessary for purposes of prevention or remedial action. … However, no (release of) information… without prior consultation and approval of the NTSB. ThisThis informationinformation isis providedprovided forfor accidentaccident preventionprevention purposespurposes onlyonly Fairbanks,Fairbanks, AKAK OctoberOctober 6,6, 20052005 Husky A-1B Mission Resource Clinic Training Damage Substantial Injuries None Procurement Fleet NTSB ID ANC06TA002 Fairbanks,Fairbanks, AKAK OctoberOctober 6,6, 20052005 Issues Mission briefing Cockpit communications Distraction Crew Selection Training standards and program objectives NTSBNTSB ProbableProbable CauseCause Fairbanks,Fairbanks, AK,AK, October October 6,6, 20052005 The National Probable Cause Transportation Safety Board determined that “The flight instructor's the probable cause of inadequate supervision of the dual this accident was … student during the landing roll, which resulted in the dual student applying the brakes excessively, and the airplane nosing over. A factor associated with the accident was the excessive braking by the dual student.” FAI -

The Design and Development of a Human-Powered
THE DESIGN AND DEVELOPMENT OF A HUMAN-POWERED AIRPLANE A THESIS Presented to the Faculty of the Graduate Division "by James Marion McAvoy^ Jr. In Partial Fulfillment of the Requirements for the Degree Master of Science in Aerospace Engineering Georgia Institute of Technology June _, 1963 A/ :o TEE DESIGN AND DETERMENT OF A HUMAN-POWERED AIRPLANE Approved: Pate Approved "by Chairman: M(Ly Z7. /q£3 In presenting the dissertation as a partial fulfillment of the requirements for an advanced degree from the Georgia Institute of Technology, I agree that the Library of the Institution shall make it available for inspection and circulation in accordance with its regulations governing materials of this type. I agree that permission to copy from, or to publish from, this dissertation may he granted by the professor under whose direction it was written, or, in his absence, by the dean of the Graduate Division when such copying or publication is solely for scholarly purposes and does not involve potential financial gain. It is under stood that any copying from, or publication of, this disser tation which involves potential financial gain will not be allowed without written permission. i "J-lW* 11 ACKNOWLEDGMENTS The author wishes to express his most sincere appreciation to Pro fessor John J, Harper for acting as thesis advisor, and for his ready ad vice at all times. Thanks are due also to Doctor Rohin B. Gray and Doctor Thomas W. Jackson for serving on the reading committee and for their help and ad vice . Gratitude is also extended to,all those people who aided in the construction of the MPA and to those who provided moral and physical sup port for the project. -

Design Study of Technology Requirements for High Performance Single-Propeller- Driven Business Airplanes
3 1176 01346 2362 ! NASA Contractor Report 3863 NASA-CR-386319850007383 Design Study of Technology Requirements for High Performance Single-Propeller- Driven Business Airplanes David L. Kohlman and James Hammer CONTRACT NAS1-16363 JANUARY 1985 N/ A NASA Contractor Report 3863 Design Study of Technology Requirements for High Performance Single-Propeller- Driven Business Airplanes David L. Kohlman and James Hammer Flight Research Laboratory University of Kansas Center for Research, Inc. Lawrence, Kansas Prepared for Langley Research Center under Contract NAS1-16363 N/ A National Aeronautics and Space Administration Scientific and Technical InformationBranch 1985 TABLE OF CONTENTS Page i. INTRODUCTION .............................................. 1 2. NOMENCLATURE .............................................. 5 3. BASELINE CONFIGURATION ANALYSIS ........................... 7 3.1 Description of Baseline Configuration ................ 7 3.2 Effect of Aspect Ratio ............................... ii 3.3 Effect of Wing Loading ............................... 12 3.4 Effect of Wing Natural Laminar Flow .................. 15 3.5 Effect of Fuselage Drag .............................. 19 4. PROPULSION SYSTEM ANALYSIS ................................. 31 4.1 GATE Engine ........................................... 32 4.1.1 Description of Engine .......................... 32 4.1.2 GASP Engine Routine ............................ 33 4.2 Very Advanced Reciprocating Engine (Spark Ignited), (SIR) ............................... 36 4.3 Very Advanced Diesel -
Principles of Helicopter Flight Acknowledgments Walter J
Principles of Helicopter Flight Acknowledgments Walter J. Wagtendonk OBE United States Second U.S. Edition, Revised 2006 Amy Laboda, Editor Don Fairbanks Aviation Supplies & Academics, Inc. Cardinal Helicopter Training, 7005 132nd Place, SE Batavia, Ohio Newcastle, Washington 98059-3153 U.S.A. Associate Professor W. (Bill) Hopper First published in New Zealand by Walter J. Wagtendonk, 1992 Dept. of Aerospace and Technology, Parks College of St Louis University Cahokia, Illinois ©2006 Walter J. Wagtendonk Connie Reeves, Major (ret) US Army, All rights reserved. Dowell, Maryland Second edition, published 2006 by Aviation Supplies & Academics, Inc. No part of this manual may be reproduced in any manner whatsoever including McDonnel Douglas electronic, photographic, photocopying, facsimile, or stored in a retrieval Seattle, Washington system, without the prior written permission of the publisher. Special thanks to Raymond W. Prouty Nothing in this manual supersedes any operational documents or procedures Westlake Village, California, for valuable issued by the Federal Aviation Administration, aircraft and avionics advice and permission to use copyright manufacturers, flight schools, or the operators of aircraft. material. New Zealand Cover photo © iStockphoto.com/Johan Ramberg Flight Lieutenant Phil Murray, Published in the United States of America Royal New Zealand Air Force (ret) John Reid, MBE 10 09 08 07 06 9 8 7 6 5 4 3 2 1 Peter Tait Helicopters NZ Ltd ASA-PHF-2 ISBN 1-56027-649-5 Colin Bint 978-1-56027-649-4 Andy Smith Nelson Aviation College Keith Broady, Nelson Library of Congress Cataloging-in-Publication Data: Bill Conning Helicopter Operations Ltd Wagtendonk, Walter J,. 1929 Ann Wagtendonk Principles of helicopter flight / Walter J. -
Design and Development of a Multi- Mission UAS Through Modular Component Integration and Additive Manufacturing
Design and Development of a Multi- Mission UAS through Modular Component Integration and Additive Manufacturing A project present to The Faculty of the Department of Aerospace Engineering San Jose State University in partial fulfillment of the requirements for the degree Master of Science in Aerospace Engineering By Kim Lau August, 2018 approved by Dr. Nikos Mourtos Faculty Advisor 2 Table of Contents 1. Introduction ........................................................................................................................5 1.1. Motivation .................................................................................................................5 1.2. Literature Review .....................................................................................................5 1.2.1. UAV Design and Development Trends ...........................................................5 1.2.2. Push for Modularity .........................................................................................7 1.2.3. Additive Manufacturing ...................................................................................8 1.3. Project Proposal ........................................................................................................11 1.4. Methodology .............................................................................................................11 2. Design Process ...................................................................................................................12 2.1. Mission Specification and -

A Numerical Blade Element Approach to Estimating Propeller Flowfields
A Numerical Blade Element Approach to Estimating Propeller Flowfields Douglas F. Hunsaker∗ Brigham Young University, Provo, UT, 84606, USA A numerical method is presented as a low computational cost approach to modeling an induced propeller flowfield. This method uses blade element theory coupled with momen- tum equations to predict the axial and tangential velocities within the slipstream of the propeller, without the small angle approximation assumption common to most propeller models. The approach is of significant importance in the design of tail-sitter vertical take- off and landing (VTOL) aircraft, where the propeller slipstream is the primary source of air flow past the wings in some flight conditions. The algorithm is presented, the model is characterized, and the results (including the results of coupling the propeller model with a lifting-line aerodynamic model) are compared with published experimental data. Nomenclature Bd = slipstream development factor b = number of blades Cl = section coefficient of lift cb = blade section chord Dp = propeller diameter J = advance ratio N = number of blade sections Rp = propeller radius r = radial distance from propeller axis s = normal distance to propeller plane Vi = blade section total induced velocity Vθi = blade section induced tangential velocity α = angle of attack to freestream βt = geometric angle of attack at propeller tip i = blade section induced angle of attack ∞ = blade section advance angle of attack Γ = blade section circulation κ = Goldstein’s kappa factor ω = propeller angular velocity θ = azimuthal angle of propeller I. Introduction nterest in vertical take-off and landing (VTOL) small unmanned air vehicles (SUAVs) has heightened Irecently as micro autopilots have become capable of handling flight trajectories common to VTOL mis- sions.