Testbed Operations Plan
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ninjo - a Meteorological Workstation of the Future
Ninjo - A Meteorological Workstation of the Future Introduction The Deutscher Wetterdienst (DWD) together with the Bundeswehr Geoinformation Office (BGIO), Meteo-Swiss, the Danish Meteorological Institute (DMI) and the Meteorological Service of Canada (MSC) have together developed a new Meteorological Workstation. The first operational version NinJo 1.0 will be introduced in early 2005. Figure 1: The NinJo Project team. The main goal of the common NinJo-Project is to replace and improve the several existing workstation systems which have been used for years since the early nineties for interactive display of meteorologi- cal data, product generation, monitoring of observations/warnings as well as research and training (Kusch 1994, Koppert 1997, Heizenreder 1999). Meteorological workstations have to provide an “easy to use environment” to support forecasting and warning activities in an operational environment as well as research and education. This was the task of the ageing systems and will be the task of NinJo as well. That is why NinJo has to provide most of the capability of existing systems, deal with recently developed applications and integrate new ones as they become accepted into the operational environment. Forecasters have been integrated from the very beginning of the project, to ensure that all important requirements of the operational forecasting activities are known. Most of the forecasters of course, would like to stick to their well known forecasting tools. However, the goal of the NinJo-Project is to implement a new system that does (nearly) everything better than the ageing ones. Since NinJo is a multi-national project with five partners (Members of the NinJo-Consortium), diverse hardware and software infrastructures, distributed development sites and local meteorological needs, a strong requirement is to build the software with a sound software architecture that could easily be adapted to the needs of the partners. -

11.1 How to Make an International Meteorological Workstation Project Successful
11.1 HOW TO MAKE AN INTERNATIONAL METEOROLOGICAL WORKSTATION PROJECT SUCCESSFUL Hans-Joachim Koppert 1 Deutscher Wetterdienst, Offenbach, Germany Torben Strunge Pedersen Danish Meteorological Institute, Copenhagen, Denmark Bruno Zürcher MeteoSwiss, Zürich, Switzerland Paul Joe Meteorological Service of Canada, Toronto, Canada 1. INTRODUCTION partners. In the course of the project, they are refined when the respective sub-project work- The Deutsche Wetterdienst (DWD) together packages are initiated. with the German Military Geophysical Service (GMGO) started a new Meteorological Workstation project (NinJo) in 2000. Soon thereafter Meteo- Swiss and the Danish Meteorological Institute (DMI) joined the project. Just recently, the Meteorological Service of Canada (MSC) decided to become a member of the NinJo consortium. The aim of the project is to replace aging workstation systems (Kusch 1994, Koppert 1997) and to provide an unified environment to support forecasting and warning operations. Besides the development of new, or the integration of recently developed applications, it is necessary to provide most of the capabilities of the existing systems. Forecasters are conservative and often would like to stay with their old tools. So we are facing an enormous pressure to implement a system that does (nearly) everything better. Since NinJo is a multi-national project with 5 Figure 1: A NinJo window with 3 scenes: gridded partners, diverse hardware and software infra- data (left), surface observations ( top right), satellite structures, distributed development sites, and local image (bottom right) meteorological needs, a strong requirement is to built the software with a sound software architecture The following list shows NinJo’s main features : that could easily be adapted to the needs of the partners. -

2 European Nowcasting Conference
2nd European Nowcasting Conference BOOK OF ABSTRACT 03 - 05 May 2017, Offenbach, Headquarters of DWD Table of contents The importance of nowcasting in the WMO WWRP strategy 3 The EUMETNET ASIST project 3 Use of Applications in Nowcasting and Very Short Range Forecasting in Europe – a Study within the Framework of the EUMETNET ASIST Project 4 Observations as basis for Nowcasting 5 Radar data - processing and their application in thunderstorm nowcasting at ZAMG 5 Potential uses of the SESAR 3D Radar Reflectivity Mosaic for Aviation Applications in UK Airspace 5 Prediction of Observation Uncertainty using Data Assimilation in an Ensemble-Nowcasting System 6 Aircraft Moisture Observations: Their importance in Nowcasting and NWP 6 The potential of the S-NPP VIIRS DNB from a forecaster’s perspective 7 Potential of the Lightning Mapping Array for the Nowcasting of Severe Weather 7 Lightning characteristics during hailstorms 8 Multi-sensor insight into severe convective events: potential for improving the nowcasting of hailstorms 8 Convective storm nowcasting by remote sensing data combination 9 Convective growth and glaciation with Meteosat in relation to precipitation formation 9 Validation of the satellite-based Thunderstorm Detection and Nowcasting System Cb-global with IAGOS Onboard Measurements 10 A novel multispectral algorithm for the detection, tracking and nowcasting of the thunderstorms using the Meteosat Second Generation images 10 SATICUS - A novel approach for the detection and short-term forecast of thunderstorms. 11 Improving Satellite-based Convective Weather Nowcasts by coupling short-range GOES-R Legacy Sounding NearCasts to Convective Initiation Products 11 Nowcasting technics and systems 12 The Nowcasting SAF (NWC SAF): products and user services. -

Guidelines for the Preparation of Papers For
MODERNISATION OF FORECASTERS’ TRAINING AT BTZ LANGEN Wilfried Jacobs and Hans Bauer Deutscher Wetterdienst – Bildungs- und Tagungszentrum, Am DFS-Campus 4, D-63225 Langen 1. Introduction During the last years the customers’ requirements for meteorological products are increasing more rapidly. The Deutscher Wetterdienst (DWD) fullfils these requirements by producing many products tailored to the needs of the individual customers. To keep a high standard the DWD applies highly sophisticated automatic forecast techniques (data retrievement, numerical weather models, postprocessing). Many products are produced automatically and distributed to the customers directly. Because automatic products are not yet sufficient to meet all demands, experienced forecasters are needed to improve the automatic products and to brief the customers. A core task is the preparation and monitoring of warnings for individual counties within Germany The DWD performs training in order to give the forecasters the ability to • choose the best guidance, • to interpret the guidance in the light of possible deficiencies during a particular weather situation and for special location, • to perform nowcasting according to the forecaster’s experiences and to recent forecast techniques. For that purpose intense and special training is necessary that is still relatively time consuming. Because the personal resources are more and more restricted, the training must be organized more effective by using self learning modules. In order to reduce the length of the seminar as well as to keep the level of the content self-learning modules shall enable the participants to get a similar level of pre-knowledge. So the DWD can concentrate only upon the most relavant aspects during the seminar (e.g., by applying the workshop-method for training). -
12.11 a Java-Based Meteorological Workstation
12.11 A JAVA-BASED METEOROLOGICAL WORKSTATION Hans-Joachim Koppert 1 Deutscher Wetterdienst, Offenbach, Germany 1. INTRODUCTION system and the underlying hardware. The performance has been greatly improved from the The Deutsche Wetterdienst (DWD) develops early days by new compiler technologies and meteorological workstation systems to support optimized packages. Within this project it was forecast operations at DWD’s central and regional shown, that even in numerical intensive applications forecasting offices. There are 3 different systems Java can outperform C++. Furthermore Java offers assisting guidance and warning operations (Kusch, APIs that especially support performant platform Koppert, and Pogoda, 1994), interactive chart independent visualization, like Java2D, Java3D, production and 3D visualization ( Koppert and and Java Advanced Imaging. Its rich set of built-in Schröder, 1997 ). Users are still happy with the libraries supports faster implementation time. current systems, but they became hard to maintain Java has already shown its potential in several and upgrade. Furthermore they lack requested projects like the VisAD library for building interactive features like GIS support, advanced analysis and collaborative visualizations ( Hibbard et al., functionality, and the seamless integration of 3D 1999 ) and FX-Net, the internet client interface to visualization and interactive chart modification into AWIPS ( Madine and Wang, 1999 ). At DWD we one single application. have built a prototype meteorological workstation In 1999 a clear decision was made to replace (Koppert et al., 1999 ) in Java to evaluate the these aging systems and to move away from usefulness of Java for this kind of application. Our dedicated hard- and software environments. The experiences with this prototype convinced us to new meteorological workstation project is at the start this project. -

Radar Network–Based Detection of Mesocyclones at the German Weather Service
FEBRUARY 2018 H E N G S T EBECK ET AL. 299 Radar Network–Based Detection of Mesocyclones at the German Weather Service THOMAS HENGSTEBECK,KATHRIN WAPLER, AND DIRK HEIZENREDER Deutscher Wetterdienst, Offenbach, Germany PAUL JOE Environment and Climate Change Canada, Toronto, Ontario, Canada (Manuscript received 29 November 2016, in final form 23 October 2017) ABSTRACT The radar network of the German Weather Service [Deutscher Wetterdienst (DWD)] provides 3D Doppler data in high spatial and temporal resolution, supporting the identification and tracking of dynamic small-scale weather phenomena. The software framework Polarimetric Radar Algorithms (POLARA) has been developed at DWD to better exploit the capabilities of the existing remote sensing data. The data processing and quality assurance implemented in POLARA include a dual-PRF dealiasing algorithm with error correction. Azimuthal shear information is derived and processed in the mesocyclone detection algo- rithm (MCD). Low- and midlevel azimuthal shear and track products are available as composite (multiradar) products. Azimuthal shear may be considered as a proxy for rotation. The MCD results and azimuthal shear products are part of the severe weather detection algorithms of DWD and are provided to the forecaster on the NinJo meteorological workstation system. The forecaster analyzes potentially severe cells by combining near-storm environment data with the MCD product as well as with the instantaneous azimuthal shear products (mid- and low level) and their tracks. These products and tracks are used to diagnose threat potential by means of azimuthal shear intensity and track longevity. Feedback from forecasters has shown the utility of the algorithms to analyze and diagnose severe convective cells in Germany and in adjacent Europe. -

EGOWS 2019 Summary of Presentations
EGOWS 2019 Summary of presentations ECMWF update and European Weather Cloud, Stephan Siemen, ECMWF The talk will give an update on the various projects we currently have at ECMWF. This includes the move to Bologna and the pilot of the European Weather Cloud. IT-migration KNMI, René Joosten, KNMI An overview of the IT-migration at the KNMI, from local computers to the cloud. ADAGUC Open source visualization, Maarten Plieger, KNMI ADAGUC is an Open Source geographical information system to visualize scientific data formats like NetCDF, HDF5, CSV and GeoJSON over the web. Supported file formats are “true color netCDF” for satellite imagery, structured grids, curvilinear grids, satellite swaths, point observations, point timeseries and polygons stored in GeoJSON. The software consists of a server-side C++ application and a client-side JavaScript application. It uses OGC Web Mapping and Web Coverage standards for data dissemination and OGC Web Processing for data analytics. Web clients like GoogleMaps, OpenLayers and Leaflet are supported and can directly use the exposed webservices. ADAGUC is used in numerous projects like KNMI GeoWeb, KNMI Data Centre, IS-ENES Climate4impact, CLIPC and C3S-34a lot 2 Magic. ADAGUC has a number of data converters and data post processors to support various data conventions. Datasets consisting of several netCDF files can be aggregated into a single dataset and are offered over WMS, WCS and OPeNDAP. Any number of dimensions are supported (e.g. time, elevation, ensemble member, threshold, reference times) , and it can update and aggregate data on an operational webservice. ADAGUC can be used as a component for Web Processing Services to subset data and convert GeoJSON to grids. -
Visualisation and Production Using Ninjo Michael Rohn1
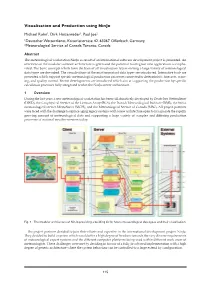
Visualisation and Production using NinJo Michael Rohn 1, Dirk Heizenreder 1, Paul Joe 2 1Deutscher Wetterdienst, Kaiserleistrasse 42, 63067 Offenbach, Germany, 2Meteorological Service of Canada, Toronto, Canada Abstract The meteorological workstation NinJo as result of an international software development project is presented. An overview on the modular software architecture is given and the potential to integrate new applications is empha - sized. The basic concepts which form the base of all visualisation layers serving a large variety of meteorological data types are described. The visualisations of the most important data types are introduced. Interactive tools are presented which support specific meteorological production processes connected to deterministic forecasts, warn - ing, and quality control. Recent developments are introduced which aim at supporting the production by specific calculation processes fully integrated within the NinJo server architecture. 1 Overview During the last years a new meteorological workstation has been collaboratively developed by Deutscher Wetterdienst (DWD), the Geophysical Service of the German Army (BGS), the Danish Meteorological Institute (DMI), the Swiss meteorological service MeteoSwiss (MCH), and the Meteorological Service of Canada (MSC). All project partners were faced with the challenge to replace aging legacy systems with a new architecture open to incorporate the rapidly growing amount of meteorological data and supporting a large variety of complex and differing production processes of national weather services today. Fig. 1 The modular architecture of NinJo providing a building kit for future meteorological data types and their visualisation. The project partners decided to join their efforts and expertise in the international development project NinJo. They decided to build a system which would offer a high degree of freedom towards the very diverse requirements of meteorological expert systems and the different computer platforms being used within different work areas of meteorologists.