Symmetry in Graph Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Disability Classification System
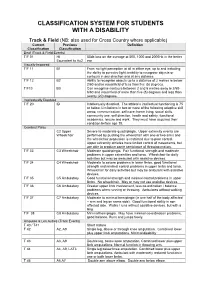
CLASSIFICATION SYSTEM FOR STUDENTS WITH A DISABILITY Track & Field (NB: also used for Cross Country where applicable) Current Previous Definition Classification Classification Deaf (Track & Field Events) T/F 01 HI 55db loss on the average at 500, 1000 and 2000Hz in the better Equivalent to Au2 ear Visually Impaired T/F 11 B1 From no light perception at all in either eye, up to and including the ability to perceive light; inability to recognise objects or contours in any direction and at any distance. T/F 12 B2 Ability to recognise objects up to a distance of 2 metres ie below 2/60 and/or visual field of less than five (5) degrees. T/F13 B3 Can recognise contours between 2 and 6 metres away ie 2/60- 6/60 and visual field of more than five (5) degrees and less than twenty (20) degrees. Intellectually Disabled T/F 20 ID Intellectually disabled. The athlete’s intellectual functioning is 75 or below. Limitations in two or more of the following adaptive skill areas; communication, self-care; home living, social skills, community use, self direction, health and safety, functional academics, leisure and work. They must have acquired their condition before age 18. Cerebral Palsy C2 Upper Severe to moderate quadriplegia. Upper extremity events are Wheelchair performed by pushing the wheelchair with one or two arms and the wheelchair propulsion is restricted due to poor control. Upper extremity athletes have limited control of movements, but are able to produce some semblance of throwing motion. T/F 33 C3 Wheelchair Moderate quadriplegia. Fair functional strength and moderate problems in upper extremities and torso. -

The AVD-Edge-Coloring Conjecture for Some Split Graphs
Matem´atica Contempor^anea, Vol. 44,1{10 c 2015, Sociedade Brasileira de Matem´atica The AVD-edge-coloring conjecture for some split graphs Alo´ısiode Menezes Vilas-B^oas C´eliaPicinin de Mello Abstract Let G be a simple graph. An adjacent vertex distinguishing edge- coloring (AVD-edge-coloring) of G is an edge-coloring of G such that for each pair of adjacent vertices u; v of G, the set of colors assigned to the edges incident with u differs from the set of colors assigned to the edges incident with v. The adjacent vertex distinguishing 0 chromatic index of G, denoted χa(G), is the minimum number of colors required to produce an AVD-edge-coloring for G. The AVD- edge-coloring conjecture states that every simple connected graph G ∼ 0 with at least three vertices and G =6 C5 has χa(G) ≤ ∆(G) + 2. The conjecture is open for arbitrary graphs, but it holds for some classes of graphs. In this note we focus on split graphs. We prove this AVD-edge- coloring conjecture for split-complete graphs and split-indifference graphs. 1 Introduction In this paper, G denotes a simple, undirected, finite, connected graph. The sets V (G) and E(G) are the vertex and edge sets of G. Let u; v 2 2000 AMS Subject Classification: 05C15. Key Words and Phrases: edge-coloring, adjacent strong edge-coloring, split graph. Supported by CNPq (132194/2010-4 and 308314/2013-1). The AVD-edge-coloring conjecture for some split graphs 2 V (G). We denote an edge by uv.A clique is a set of vertices pairwise adjacent in G and a stable set is a set of vertices such that no two of which are adjacent. -

Decomposition of Wheel Graphs Into Stars, Cycles and Paths
Malaya Journal of Matematik, Vol. 9, No. 1, 456-460, 2021 https://doi.org/10.26637/MJM0901/0076 Decomposition of wheel graphs into stars, cycles and paths M. Subbulakshmi1 and I. Valliammal2* Abstract Let G = (V;E) be a finite graph with n vertices. The Wheel graph Wn is a graph with vertex set fv0;v1;v2;:::;vng and edge-set consisting of all edges of the form vivi+1 and v0vi where 1 ≤ i ≤ n, the subscripts being reduced modulo n. Wheel graph of (n + 1) vertices denoted by Wn. Decomposition of Wheel graph denoted by D(Wn). A star with 3 edges is called a claw S3. In this paper, we show that any Wheel graph can be decomposed into following ways. 8 (n − 2d)S ; d = 1;2;3;::: if n ≡ 0 (mod 6) > 3 > >[(n − 2d) − 1]S3 and P3; d = 1;2;3::: if n ≡ 1 (mod 6) > <[(n − 2d) − 1]S3 and P2; d = 1;2;3;::: if n ≡ 2 (mod 6) D(Wn) = . (n − 2d)S and C ; d = 1;2;3;::: if n ≡ 3 (mod 6) > 3 3 > >(n − 2d)S3 and P3; d = 1;2;3::: if n ≡ 4 (mod 6) > :(n − 2d)S3 and P2; d = 1;2;3;::: if n ≡ 5 (mod 6) Keywords Wheel Graph, Decomposition, claw. AMS Subject Classification 05C70. 1Department of Mathematics, G.V.N. College, Kovilpatti, Thoothukudi-628502, Tamil Nadu, India. 2Department of Mathematics, Manonmaniam Sundaranar University, Tirunelveli-627012, Tamil Nadu, India. *Corresponding author: [email protected]; [email protected] Article History: Received 01 November 2020; Accepted 30 January 2021 c 2021 MJM. -

Exclusive Graph Searching Lélia Blin, Janna Burman, Nicolas Nisse
Exclusive Graph Searching Lélia Blin, Janna Burman, Nicolas Nisse To cite this version: Lélia Blin, Janna Burman, Nicolas Nisse. Exclusive Graph Searching. Algorithmica, Springer Verlag, 2017, 77 (3), pp.942-969. 10.1007/s00453-016-0124-0. hal-01266492 HAL Id: hal-01266492 https://hal.archives-ouvertes.fr/hal-01266492 Submitted on 2 Feb 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Exclusive Graph Searching∗ L´eliaBlin Sorbonne Universit´es, UPMC Univ Paris 06, CNRS, Universit´ed'Evry-Val-d'Essonne. LIP6 UMR 7606, 4 place Jussieu 75005, Paris, France [email protected] Janna Burman LRI, Universit´eParis Sud, CNRS, UMR-8623, France. [email protected] Nicolas Nisse Inria, France. Univ. Nice Sophia Antipolis, CNRS, I3S, UMR 7271, Sophia Antipolis, France. [email protected] February 2, 2016 Abstract This paper tackles the well known graph searching problem, where a team of searchers aims at capturing an intruder in a network, modeled as a graph. This problem has been mainly studied for its relationship with the pathwidth of graphs. All variants of this problem assume that any node can be simultaneously occupied by several searchers. -
Library of Congress Classification
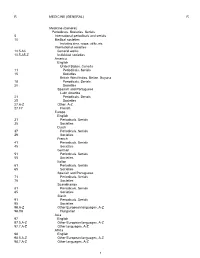
R MEDICINE (GENERAL) R Medicine (General) Periodicals. Societies. Serials 5 International periodicals and serials 10 Medical societies Including aims, scope, utility, etc. International societies 10.5.A3 General works 10.5.A5-Z Individual societies America English United States. Canada 11 Periodicals. Serials 15 Societies British West Indies. Belize. Guyana 18 Periodicals. Serials 20 Societies Spanish and Portuguese Latin America 21 Periodicals. Serials 25 Societies 27.A-Z Other, A-Z 27.F7 French Europe English 31 Periodicals. Serials 35 Societies Dutch 37 Periodicals. Serials 39 Societies French 41 Periodicals. Serials 45 Societies German 51 Periodicals. Serials 55 Societies Italian 61 Periodicals. Serials 65 Societies Spanish and Portuguese 71 Periodicals. Serials 75 Societies Scandinavian 81 Periodicals. Serials 85 Societies Slavic 91 Periodicals. Serials 95 Societies 96.A-Z Other European languages, A-Z 96.H8 Hungarian Asia 97 English 97.5.A-Z Other European languages, A-Z 97.7.A-Z Other languages, A-Z Africa 98 English 98.5.A-Z Other European languages, A-Z 98.7.A-Z Other languages, A-Z 1 R MEDICINE (GENERAL) R Periodicals. Societies. Serials -- Continued Australasia and Pacific islands 99 English 99.5.A-Z Other European languages, A-Z 99.7.A-Z Other languages, A-Z Indexes see Z6658+ (101) Yearbooks see R5+ 104 Calendars. Almanacs Cf. AY81.M4 American popular medical almanacs 106 Congresses 108 Medical laboratories, institutes, etc. Class here papers and proceedings For works about these organizations see R860+ Collected works (nonserial) Cf. R126+ Ancient Greek and Latin works 111 Several authors 114 Individual authors Communication in medicine Cf. -

Symmetry and Structure of Graphs
Symmetry and Structure of graphs by Kovács Máté Submitted to Central European University Department of Department of Mathematics and its Applications In partial fulfillment of the requirements for the degree of Master of Science Supervisor: Dr. Hegedus˝ Pál CEU eTD Collection Budapest, Hungary 2014 I, the undersigned [Kovács Máté], candidate for the degree of Master of Science at the Central European University Department of Mathematics and its Applications, declare herewith that the present thesis is exclusively my own work, based on my research and only such external information as properly credited in notes and bibliography. I declare that no unidentified and illegitimate use was made of work of others, and no part the thesis infringes on any person’s or institution’s copyright. I also declare that no part the thesis has been submitted in this form to any other institution of higher education for an academic degree. Budapest, 9 May 2014 ————————————————— Signature CEU eTD Collection c by Kovács Máté, 2014 All Rights Reserved. ii Abstract The thesis surveys results on structure and symmetry of graphs. Structure and symmetry of graphs can be handled by graph homomorphisms and graph automorphisms - the two approaches are compatible. Two graphs are called homomorphically equivalent if there is a graph homomorphism between the two graphs back and forth. Being homomorphically equivalent is an equivalence relation, and every class has a vertex minimal element called the graph core. It turns out that transitive graphs have transitive cores. The possibility of a structural result regarding transitive graphs is investigated. We speculate that almost all transitive graphs are cores. -

Reframing Sport Contexts: Labeling, Identities, and Social Justice
Reframing Sport Contexts: Labeling, Identities, and Social Justice Dr. Ted Fay and Eli Wolff Sport in Society Disability in Sport Initiative Northeastern University Critical Context • Marginalization (Current Status Quo) vs. • Legitimatization (New Inclusive Paradigm) Critical Context Naturalism vs. Trans-Humanism (Wolbring, G. (2009) How Do We Handle Our Differences related to Labeling Language and Cultural Identities? • Stereotyping? • Prejudice? • Discrimination? (Carr-Ruffino, 2003, p. 1) Ten Major Cultural Differences 1) Source of Control 2) Collectivism or Individualism 3) Homogeneous or Heterogeneous 4) Feminine or Masculine 5) Rank Status 6) Risk orientation 7) Time use 8) Space use 9) Communication Style 10) Economic System (Carr – Ruffino, 2003, p.27) Rationale for Inclusion • Divisioning by classification relative to “fair play” and equity principles • Sport model rather than “ism” segregated model (e.g., by race, gender, disability, socio-economic class, sexual orientation, look (body image), sect (religion), age) • Legitimacy • Human rights and equality Social Dynamics of Inequality Reinforce and reproduce Social Institutions Ideology Political (Patriarchy) Economic Educational Perpetuates Religious Prejudice & Are institutionalized by Discrimination Cultural Practices (ISM) Sport Music Art (Sage, 1998) Five Interlinking Conceptual Frameworks • Critical Change Factors Model (CCFM) • Organizational Continuum in Sport Governance (OCSG) • Criteria for Inclusion in Sport Organizations (CISO) • Individual Multiple Identity Sport Classifications Index (IMISCI) • Sport Opportunity Spectrum (SOS) Critical Change Factors Model (CCFM) F1) Change/occurrence of major societal event (s) affecting public opinion toward ID group. F2) Change in laws, government and court action in changing public policies toward ID group. F3) Change in level of influence of high profile ID group role models on public opinion. -

Graphs Based on Hoop Algebras
mathematics Article Graphs Based on Hoop Algebras Mona Aaly Kologani 1, Rajab Ali Borzooei 2 and Hee Sik Kim 3,* 1 Hatef Higher Education Institute, Zahedan 8301, Iran; [email protected] 2 Department of Mathematics, Shahid Beheshti University, Tehran 7561, Iran; [email protected] 3 Research Institute for Natural Science, Department of Mathematics, Hanyang University, Seoul 04763, Korea * Correspondence: [email protected]; Tel.: +82-2-2220-0897 Received: 14 March 2019; Accepted: 17 April 2019 Published: 21 April 2019 Abstract: In this paper, we investigate the graph structures on hoop algebras. First, by using the quasi-filters and r-prime (one-prime) filters, we construct an implicative graph and show that it is connected and under which conditions it is a star or tree. By using zero divisor elements, we construct a productive graph and prove that it is connected and both complete and a tree under some conditions. Keywords: hoop algebra; zero divisor; implicative graph; productive graph MSC: 06F99; 03G25; 18B35; 22A26 1. Introduction Non-classical logic has become a formal and useful tool for computer science to deal with uncertain information and fuzzy information. The algebraic counterparts of some non-classical logics satisfy residuation and those logics can be considered in a frame of residuated lattices [1]. For example, Hájek’s BL (basic logixc [2]), Lukasiewicz’s MV (many-valued logic [3]) and MTL (monoidal t-norm-based logic [4]) are determined by the class of BL-algebras, MV-algebras and MTL-algebras, respectively. All of these algebras have lattices with residuation as a common support set. -
![Arxiv:2101.02451V1 [Math.CO] 7 Jan 2021 the Diagonal Graph](https://docslib.b-cdn.net/cover/1722/arxiv-2101-02451v1-math-co-7-jan-2021-the-diagonal-graph-371722.webp)
Arxiv:2101.02451V1 [Math.CO] 7 Jan 2021 the Diagonal Graph
The diagonal graph R. A. Bailey and Peter J. Cameron School of Mathematics and Statistics, University of St Andrews, North Haugh, St Andrews, Fife, KY16 9SS, U.K. Abstract According to the O’Nan–Scott Theorem, a finite primitive permu- tation group either preserves a structure of one of three types (affine space, Cartesian lattice, or diagonal semilattice), or is almost simple. However, diagonal groups are a much larger class than those occurring in this theorem. For any positive integer m and group G (finite or in- finite), there is a diagonal semilattice, a sub-semilattice of the lattice of partitions of a set Ω, whose automorphism group is the correspond- ing diagonal group. Moreover, there is a graph (the diagonal graph), bearing much the same relation to the diagonal semilattice and group as the Hamming graph does to the Cartesian lattice and the wreath product of symmetric groups. Our purpose here, after a brief introduction to this semilattice and graph, is to establish some properties of this graph. The diagonal m graph ΓD(G, m) is a Cayley graph for the group G , and so is vertex- transitive. We establish its clique number in general and its chromatic number in most cases, with a conjecture about the chromatic number in the remaining cases. We compute the spectrum of the adjacency matrix of the graph, using a calculation of the M¨obius function of the arXiv:2101.02451v1 [math.CO] 7 Jan 2021 diagonal semilattice. We also compute some other graph parameters and symmetry properties of the graph. We believe that this family of graphs will play a significant role in algebraic graph theory. -

Blast Domination for Mycielski's Graph of Graphs
International Journal of Engineering and Advanced Technology (IJEAT) ISSN: 2249 – 8958, Volume-8, Issue-6S3, September 2019 Blast Domination for Mycielski’s Graph of Graphs K. Ameenal Bibi, P.Rajakumari AbstractThe hub of this article is a search on the behavior of is the minimum cardinality of a distance-2 dominating set in the Blast domination and Blast distance-2 domination for 퐺. Mycielski’s graph of some particular graphs and zero divisor graphs. Definition 2.3[7] A non-empty subset 퐷 of 푉 of a connected graph 퐺 is Key Words:Blast domination number, Blast distance-2 called a Blast dominating set, if 퐷 is aconnected dominating domination number, Mycielski’sgraph. set and the induced sub graph < 푉 − 퐷 >is triple connected. The minimum cardinality taken over all such Blast I. INTRODUCTION dominating sets is called the Blast domination number of The concept of triple connected graphs was introduced by 퐺and is denoted by tc . Paulraj Joseph et.al [9]. A graph is said to be triple c (G) connected if any three vertices lie on a path in G. In [6] the Definition2.4 authors introduced triple connected domination number of a graph. A subset D of V of a nontrivial graph G is said to A non-empty subset 퐷 of vertices in a graph 퐺 is a blast betriple connected dominating set, if D is a dominating set distance-2 dominating set if every vertex in 푉 − 퐷 is within and <D> is triple connected. The minimum cardinality taken distance-2 of atleast one vertex in 퐷. -

Michael Borinsky Graphs in Perturbation Theory Algebraic Structure and Asymptotics Springer Theses
Springer Theses Recognizing Outstanding Ph.D. Research Michael Borinsky Graphs in Perturbation Theory Algebraic Structure and Asymptotics Springer Theses Recognizing Outstanding Ph.D. Research Aims and Scope The series “Springer Theses” brings together a selection of the very best Ph.D. theses from around the world and across the physical sciences. Nominated and endorsed by two recognized specialists, each published volume has been selected for its scientific excellence and the high impact of its contents for the pertinent field of research. For greater accessibility to non-specialists, the published versions include an extended introduction, as well as a foreword by the student’s supervisor explaining the special relevance of the work for the field. As a whole, the series will provide a valuable resource both for newcomers to the research fields described, and for other scientists seeking detailed background information on special questions. Finally, it provides an accredited documentation of the valuable contributions made by today’s younger generation of scientists. Theses are accepted into the series by invited nomination only and must fulfill all of the following criteria • They must be written in good English. • The topic should fall within the confines of Chemistry, Physics, Earth Sciences, Engineering and related interdisciplinary fields such as Materials, Nanoscience, Chemical Engineering, Complex Systems and Biophysics. • The work reported in the thesis must represent a significant scientific advance. • If the thesis includes previously published material, permission to reproduce this must be gained from the respective copyright holder. • They must have been examined and passed during the 12 months prior to nomination. • Each thesis should include a foreword by the supervisor outlining the signifi- cance of its content. -

A New Approach to Number of Spanning Trees of Wheel Graph Wn in Terms of Number of Spanning Trees of Fan Graph Fn
[ VOLUME 5 I ISSUE 4 I OCT.– DEC. 2018] E ISSN 2348 –1269, PRINT ISSN 2349-5138 A New Approach to Number of Spanning Trees of Wheel Graph Wn in Terms of Number of Spanning Trees of Fan Graph Fn Nihar Ranjan Panda* & Purna Chandra Biswal** *Research Scholar, P. G. Dept. of Mathematics, Ravenshaw University, Cuttack, Odisha. **Department of Mathematics, Parala Maharaja Engineering College, Berhampur, Odisha-761003, India. Received: July 19, 2018 Accepted: August 29, 2018 ABSTRACT An exclusive expression τ(Wn) = 3τ(Fn)−2τ(Fn−1)−2 for determining the number of spanning trees of wheel graph Wn is derived using a new approach by defining an onto mapping from the set of all spanning trees of Wn+1 to the set of all spanning trees of Wn. Keywords: Spanning Tree, Wheel, Fan 1. Introduction A graph consists of a non-empty vertex set V (G) of n vertices together with a prescribed edge set E(G) of r unordered pairs of distinct vertices of V(G). A graph G is called labeled graph if all the vertices have certain label, and a tree is a connected acyclic graph according to Biggs [1]. All the graphs in this paper are finite, undirected, and simple connected. For a graph G = (V(G), E(G)), a spanning tree in G is a tree which has the same vertex set as G has. The number of spanning trees in a graph G, denoted by τ(G), is an important invariant of the graph. It is also an important measure of reliability of a network.