Resampling Variance Estimation in Surveys with Missing Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Spatial Duration Data for the Spatial Re- Gression Context
Missing Data In Spatial Regression 1 Frederick J. Boehmke Emily U. Schilling University of Iowa Washington University Jude C. Hays University of Pittsburgh July 15, 2015 Paper prepared for presentation at the Society for Political Methodology Summer Conference, University of Rochester, July 23-25, 2015. 1Corresponding author: [email protected] or [email protected]. We are grateful for funding provided by the University of Iowa Department of Political Science. Com- ments from Michael Kellermann, Walter Mebane, and Vera Troeger greatly appreciated. Abstract We discuss problems with missing data in the context of spatial regression. Even when data are MCAR or MAR based solely on exogenous factors, estimates from a spatial re- gression with listwise deletion can be biased, unlike for standard estimators with inde- pendent observations. Further, common solutions for missing data such as multiple im- putation appear to exacerbate the problem rather than fix it. We propose a solution for addressing this problem by extending previous work including the EM approach devel- oped in Hays, Schilling and Boehmke (2015). Our EM approach iterates between imputing the unobserved values and estimating the spatial regression model using these imputed values. We explore the performance of these alternatives in the face of varying amounts of missing data via Monte Carlo simulation and compare it to the performance of spatial regression with listwise deletion and a benchmark model with no missing data. 1 Introduction Political science data are messy. Subsets of the data may be missing; survey respondents may not answer all of the questions, economic data may only be available for a subset of countries, and voting records are not always complete. -
Missing Data Module 1: Introduction, Overview
Missing Data Module 1: Introduction, overview Roderick Little and Trivellore Raghunathan Course Outline 9:00-10:00 Module 1 Introduction and overview 10:00-10:30 Module 2 Complete-case analysis, including weighting methods 10:30-10:45 Break 10:45-12:00 Module 3 Imputation, multiple imputation 1:30-2:00 Module 4 A little likelihood theory 2:00-3:00 Module 5 Computational methods/software 3:00-3:30 Module 6: Nonignorable models Module 1:Introduction and Overview Module 1: Introduction and Overview • Missing data defined, patterns and mechanisms • Analysis strategies – Properties of a good method – complete-case analysis – imputation, and multiple imputation – analysis of the incomplete data matrix – historical overview • Examples of missing data problems Module 1:Introduction and Overview Module 1: Introduction and Overview • Missing data defined, patterns and mechanisms • Analysis strategies – Properties of a good method – complete-case analysis – imputation, and multiple imputation – analysis of the incomplete data matrix – historical overview • Examples of missing data problems Module 1:Introduction and Overview Missing data defined variables If filled in, meaningful for cases analysis? • Always assume missingness hides a meaningful value for analysis • Examples: – Missing data from missed clinical visit( √) – No-show for a preventive intervention (?) – In a longitudinal study of blood pressure medications: • losses to follow-up ( √) • deaths ( x) Module 1:Introduction and Overview Patterns of Missing Data • Some methods work for a general -
Coping with Missing Data in Randomized Controlled Trials
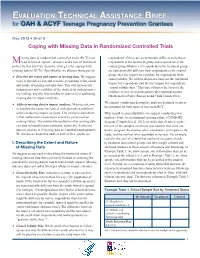
EVALUATION TECHNICAL ASSISTANCE BRIEF for OAH & ACYF Teenage Pregnancy Prevention Grantees May 2013 • Brief 3 Coping with Missing Data in Randomized Controlled Trials issing data in randomized controlled trials (RCTs) can respondents3 if there are no systematic differences between Mlead to biased impact estimates and a loss of statistical respondents in the treatment group and respondents in the power. In this brief we describe strategies for coping with control group. However, if respondents in the treatment group missing data in RCTs.1 Specifically, we discuss strategies to: are systematically different from respondents in the control group, then the impact we calculate for respondents lacks ● Describe the extent and nature of missing data. We suggest causal validity. We call the difference between the calculated ways to provide a clear and accurate accounting of the extent impact for respondents and the true impact for respondents and nature of missing outcome data. This will increase the “causal validity bias.” This type of bias is the focus of the transparency and credibility of the study, help with interpret- evidence review of teen pregnancy prevention programs ing findings, and also help to select an approach for addressing (Mathematica Policy Research and Child Trends 2012). missing data in impact analyses. We suggest conducting descriptive analyses designed to assess ● Address missing data in impact analyses. Missing outcome the potential for both types of bias in an RCT. or baseline data pose mechanical and substantive problems when conducting impact analyses. The mechanical problem With regard to generalizability, we suggest conducting two is that mathematical operations cannot be performed on analyses. -

Monte Carlo Likelihood Inference for Missing Data Models
MONTE CARLO LIKELIHOOD INFERENCE FOR MISSING DATA MODELS By Yun Ju Sung and Charles J. Geyer University of Washington and University of Minnesota Abbreviated title: Monte Carlo Likelihood Asymptotics We describe a Monte Carlo method to approximate the maximum likeli- hood estimate (MLE), when there are missing data and the observed data likelihood is not available in closed form. This method uses simulated missing data that are independent and identically distributed and independent of the observed data. Our Monte Carlo approximation to the MLE is a consistent and asymptotically normal estimate of the minimizer ¤ of the Kullback- Leibler information, as both a Monte Carlo sample size and an observed data sample size go to in¯nity simultaneously. Plug-in estimates of the asymptotic variance are provided for constructing con¯dence regions for ¤. We give Logit-Normal generalized linear mixed model examples, calculated using an R package that we wrote. AMS 2000 subject classi¯cations. Primary 62F12; secondary 65C05. Key words and phrases. Asymptotic theory, Monte Carlo, maximum likelihood, generalized linear mixed model, empirical process, model misspeci¯cation 1 1. Introduction. Missing data (Little and Rubin, 2002) either arise naturally|data that might have been observed are missing|or are intentionally chosen|a model includes random variables that are not observable (called latent variables or random e®ects). A mixture of normals or a generalized linear mixed model (GLMM) is an example of the latter. In either case, a model is speci¯ed for the complete data (x; y), where x is missing and y is observed, by their joint den- sity f(x; y), also called the complete data likelihood (when considered as a function of ). -

Missing Data
4 Missing Data Paul D. Allison INTRODUCTION they have spent a great deal time, money and effort in collecting. And so, many methods for Missing data are ubiquitous in psychological ‘salvaging’ the cases with missing data have research. By missing data, I mean data that become popular. are missing for some (but not all) variables For a very long time, however, missing and for some (but not all) cases. If data are data could be described as the ‘dirty little missing on a variable for all cases, then that secret’ of statistics. Although nearly everyone variable is said to be latent or unobserved. had missing data and needed to deal with On the other hand, if data are missing on the problem in some way, there was almost all variables for some cases, we have what nothing in the textbook literature to pro- is known as unit non-response, as opposed vide either theoretical or practical guidance. to item non-response which is another name Although the reasons for this reticence are for the subject of this chapter. I will not deal unclear, I suspect it was because none of the with methods for latent variables or unit non- popular methods had any solid mathematical response here, although some of the methods foundation. As it turns out, all of the most we will consider can be adapted to those commonly used methods for handling missing situations. data have serious deficiencies. Why are missing data a problem? Because Fortunately, the situation has changed conventional statistical methods and software dramatically in recent years. -

Parameter Estimation in Stochastic Volatility Models with Missing Data Using Particle Methods and the Em Algorithm
PARAMETER ESTIMATION IN STOCHASTIC VOLATILITY MODELS WITH MISSING DATA USING PARTICLE METHODS AND THE EM ALGORITHM by Jeongeun Kim BS, Seoul National University, 1998 MS, Seoul National University, 2000 Submitted to the Graduate Faculty of the Department of Statistics in partial fulfillment of the requirements for the degree of Doctor of Philosophy University of Pittsburgh 2005 UNIVERSITY OF PITTSBURGH DEPARTMENT OF STATISTICS This dissertation was presented by Jeongeun Kim It was defended on April 22, 2005 and approved by David S. Stoffer, Professor Ori Rosen, Professor Wesley Thompson, Professor Anthony Brockwell, Professor Dissertation Director: David S. Stoffer, Professor ii Copyright c by Jeongeun Kim 2005 iii PARAMETER ESTIMATION IN STOCHASTIC VOLATILITY MODELS WITH MISSING DATA USING PARTICLE METHODS AND THE EM ALGORITHM Jeongeun Kim, PhD University of Pittsburgh, 2005 The main concern of financial time series analysis is how to forecast future values of financial variables, based on all available information. One of the special features of financial variables, such as stock prices and exchange rates, is that they show changes in volatility, or variance, over time. Several statistical models have been suggested to explain volatility in data, and among them Stochastic Volatility models or SV models have been commonly and successfully used. Another feature of financial variables I want to consider is the existence of several missing data. For example, there is no stock price data available for regular holidays, such as Christmas, Thanksgiving, and so on. Furthermore, even though the chance is small, stretches of data may not available for many reasons. I believe that if this feature is brought into the model, it will produce more precise results. -

Statistical Inference in Missing Data by MCMC And
I Takahashi, M 2017 Statistical Inference in Missing Data by MCMC and CODATA '$7$6&,(1&( S Non-MCMC Multiple Imputation Algorithms: Assessing the Effects of U -2851$/ Between-Imputation Iterations. Data Science Journal, 16: 37, pp. 1–17, DOI: https://doi.org/10.5334/dsj-2017-037 RESEARCH PAPER Statistical Inference in Missing Data by MCMC and Non-MCMC Multiple Imputation Algorithms: Assessing the Effects of Between-Imputation Iterations Masayoshi Takahashi IR Office, Tokyo University of Foreign Studies, Tokyo, JP [email protected] Incomplete data are ubiquitous in social sciences; as a consequence, available data are inefficient (ineffective) and often biased. In the literature, multiple imputation is known to be the standard method to handle missing data. While the theory of multiple imputation has been known for decades, the implementation is difficult due to the complicated nature of random draws from the posterior distribution. Thus, there are several computational algorithms in software: Data Augmentation (DA), Fully Conditional Specification (FCS), and Expectation-Maximization with Bootstrapping (EMB). Although the literature is full of comparisons between joint modeling (DA, EMB) and conditional modeling (FCS), little is known about the relative superiority between the MCMC algorithms (DA, FCS) and the non-MCMC algorithm (EMB), where MCMC stands for Markov chain Monte Carlo. Based on simulation experiments, the current study contends that EMB is a confidence proper (confidence-supporting) multiple imputation algorithm without between-imputation iterations; thus, EMB is more user-friendly than DA and FCS. Keywords: MCMC; Markov chain Monte Carlo; Incomplete data; Nonresponse; Joint modeling; Conditional modeling 1 Introduction Generally, it is quite difficult to obtain complete data in social surveys (King et al. -

The Effects of Missing Data
1.2 REPLACING MISSING DATA FOR ENSEMBLE SYSTEMS Tyler McCandless*, Sue Ellen Haupt, George Young 1 The Pennsylvania State University A major problem for statistical predictive system 1. INTRODUCTION developers is obtaining enough input data from Numerical Weather Prediction (NWP) models for Missing data presents a problem in many fields, developing, or training, new post-processing methods. including meteorology. The data can be missing at Such post-processing, or calibrating, of NWP forecasts random, in recurring patterns, or in large sections. has been shown to decrease errors in forecasting since Incomplete datasets can lead to misleading conclusions, the introduction of Model Output Statistics (MOS) as demonstrated by Kidson and Trenberth (1988), who (Glahn and Lowry 1972). For these statistical post- assessed the impact of missing data on general processing techniques to make these improvements in circulation statistics by systematically decreasing the forecast skill, however, requires training them on amount of available training data. They determined that archived forecasts and validation data. Enough data the ratio of the Root Mean Square Error (RMSE) in the must be available for the resulting technique to be monthly mean to the daily standard deviation was two to stable. Thus, imputing any missing data will provide three times higher when the missing data was spaced larger training and validation datasets for this process. randomly compared to spaced equally, and RMSE The advent of ensembles of forecasts has led to increased by up to a factor of two when the missing data new methods of post-processing. Post-processing occurred in one block. Therefore, the spacing of the ensemble temperature data can produce an even more missing data can have an impact on statistical analyses. -

Missing Data
university of copenhagen department of biostatistics university of copenhagen department of biostatistics Faculty of Health Sciences Contents ◮ Planning statistical analyses with missing data. ◮ Missing data Missing data types. ◮ Bias due to missing data or improper handling of these. Analysis of repeated measurements 2017 ◮ Analyzing data with missing values using multiple imputations, likelihood inference, or inverse probability weighting. Julie Lyng Forman & Lene Theil Skovgaard ◮ Analysis of longitudinal studies with death or other Department of Biostatistics, University of Copenhagen intercurrent events. Suggested reading FLW (2011) chapters 18 +19, lecture notes. 2 / 60 university of copenhagen department of biostatistics university of copenhagen department of biostatistics Outline What is missing data? What to worry about when you have missing data Most investigations are planned to be balanced but almost inevitably turn out to have intermittent missing values , or Missing data types patients who drop-out for some reason . Simple methods for handling missing data ◮ Just by coincidence (sample lost or ruined). Advanced methods for handling missing data ◮ The patient moved away (may be worrysome). ◮ The patient has recovered (worrying, i.e. carrying Missing data in population average models (binary data) information). Death and other intercurrent events in longitudinal studies ◮ The patient is too ill to show up (very serious, i.e. carrying unretrievable information). Evaluation 3 / 60 4 / 60 university of copenhagen department of biostatistics university of copenhagen department of biostatistics Missing data is trouble Planning statistical analyses with missing data Missing data should be addressed already in the planning stage. ◮ It complicates statistical analysis. 1. What are the outcomes and explanatory variables? ◮ It may bias statistical results beyond repair. -

Comparison of Missing Data Infilling Mechanisms for Recovering a Real-World Single Station Streamflow Observation
International Journal of Environmental Research and Public Health Article Comparison of Missing Data Infilling Mechanisms for Recovering a Real-World Single Station Streamflow Observation Thelma Dede Baddoo 1,2,*, Zhijia Li 2, Samuel Nii Odai 3, Kenneth Rodolphe Chabi Boni 4, Isaac Kwesi Nooni 1,5,6 and Samuel Ato Andam-Akorful 7 1 Binjiang College, Nanjing University of Information Science & Technology, No.333 Xishan Road, Wuxi 214105, China; [email protected] 2 College of Hydrology and Water Resources, Hohai University, Nanjing 210098, China; [email protected] 3 Office of the Vice Chancellor, Accra Technical University, Accra GA000, Ghana; [email protected] 4 College of Computer and Information Engineering, Hohai University, Nanjing 211100, China; [email protected] 5 Wuxi Institute of Technology, Nanjing University of Information Science & Technology, Wuxi 214105, China 6 School of Geographical Sciences, Nanjing University of Information Science & Technology, Nanjing 210044, China 7 Department of Geomatic Engineering, Kwame Nkrumah University of Science and Technology, Kumasi AK000, Ghana; [email protected] * Correspondence: [email protected] Abstract: Reconstructing missing streamflow data can be challenging when additional data are not available, and missing data imputation of real-world datasets to investigate how to ascertain the accuracy of imputation algorithms for these datasets are lacking. This study investigated the necessary complexity of missing data reconstruction schemes to obtain the relevant results for a Citation: Baddoo, T.D.; Li, Z.; Odai, real-world single station streamflow observation to facilitate its further use. This investigation was S.N.; Boni, K.R.C.; Nooni, I.K.; implemented by applying different missing data mechanisms spanning from univariate algorithms to Andam-Akorful, S.A. -

A Monte Carlo Study: the Impact of Missing Data in Cross- Classification Random Ffe Ects Models
Georgia State University ScholarWorks @ Georgia State University Educational Policy Studies Dissertations Department of Educational Policy Studies 8-12-2009 A Monte Carlo Study: The Impact of Missing Data in Cross- Classification Random ffE ects Models Meltem Alemdar Follow this and additional works at: https://scholarworks.gsu.edu/eps_diss Part of the Education Commons, and the Education Policy Commons Recommended Citation Alemdar, Meltem, "A Monte Carlo Study: The Impact of Missing Data in Cross-Classification Random Effects Models." Dissertation, Georgia State University, 2009. https://scholarworks.gsu.edu/eps_diss/34 This Dissertation is brought to you for free and open access by the Department of Educational Policy Studies at ScholarWorks @ Georgia State University. It has been accepted for inclusion in Educational Policy Studies Dissertations by an authorized administrator of ScholarWorks @ Georgia State University. For more information, please contact [email protected]. ACCEPTANCE This dissertation, A MONTE CARLO STUDY: THE IMPACT OF MISSING DATA IN CROSS-CLASSIFICATION RANDOM EFFECTS MODELS, by MELTEM ALEMDAR, was prepared under the direction of the candidate’s Dissertation Advisory Committee. It is accepted by the committee members in partial fulfillment of the requirements for the degree Doctor of Philosophy in the College of Education, Georgia State University. The Dissertation Advisory Committee and the student’s Department Chair, as representatives of the faculty, certify that this dissertation has met all standards of excellence and scholarship as determined by the faculty. The Dean of the College of Education concurs. ______________________________ ______________________________ Carolyn F. Furlow, Ph.D. Philo A. Hutcheson, Ph.D. Committee Chair Committee Member ______________________________ ______________________________ Phillip E. Gagne, Ph.D. -
Potential Sources of Missing Data in a Meta-Analysis
SMG advanced workshop, Cardiff, March 4-5, 2010 PotentialPotential sourcessources ofof missingmissing datadata inin aa meta-analysismeta-analysis Missing data • Studies not found • Outcome not reported Julian Higgins • Outcome partially reported (e.g. missing SD or SE) MRC Biostatistics Unit Cambridge, UK • Extra information required for meta-analysis (e.g. imputed correlation coefficient) with thanks to Ian White, Fred Wolf, Angela Wood, Alex Sutton • Missing participants • No information on study characteristic for heterogeneity analysis ConceptsConcepts inin missingmissing datadata ConceptsConcepts inin missingmissing datadata 1. ‘Missing completely at random’ 2. ‘Missing at random’ • As if missing observation was randomly picked • Missingness depends on things you know about, and • Missingness unrelated to the true (missing) value not on the missing data themselves • e.g. – (genuinely) accidental deletion of a file •e.g. – observations measured on a random sample – older people more likely to drop out (irrespective of – statistics not reported due to ignorance of their the effect of treatment) importance(?) – recent cluster trials more likely to report intraclass correlation • OK (unbiased) to analyse just the data available, but – experimental treatment more likely to cause drop- sample size is reduced - which may not be ideal out (independent of therapeutic effect) • Not very common! • Usually surmountable StrategiesStrategies forfor dealingdealing withwith missingmissing datadata ConceptsConcepts inin missingmissing datadata •