Electric Motor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
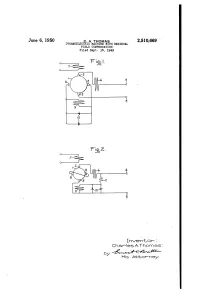
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

ACSM1 System Engineering Manual
ACSM1 System Engineering Manual 2 3 ACSM1-04 Drive Modules System Engineering Manual 3AFE 68978297 REV A EN EFFECTIVE: 08.10.2007 PDM Vault ID: 00579251 2007 ABB Oy. All rights reserved. 4 5 Safety instructions Never work on the drive, the braking chopper circuit, the motor cable or the motor when input power is applied to the drive. After disconnecting input power, always wait for 5 minutes to let the intermediate circuit capacitors discharge before you start working on the drive, control cabling, motor or motor cable. Even when input power is not applied to the drive, externally supplied control circuits may carry dangerous voltages. Always ensure by measuring that no voltage is actually present. A rotating permanent magnet motor can generate a dangerous voltage. Lock the motor shaft mechanically before connecting a permanent magnet motor to the drive, and before doing any work on a drive system connected to a permanent magnet motor. For complete safety instructions see the ACSM1-04 Drive Modules (0.75 to 45 kW) Hardware Manual (code: 3AFE68797543 [English]). 6 Table of contents Safety instructions ................................................................................................................... 5 Table of contents...................................................................................................................... 6 About this manual .................................................................................................................... 8 Compatibility .............................................................................................................................. -

A Motor Primer - Part 5
A MOTOR PRIMER - PART 5 Copyright Material IEEE Paper No. PCIC 2005-9 Bryan Oakes Gary Donner Senior Member, IEEE Fellow, IEEE Rockwell Automation Shell Oil Products US 101 Reliance Road 2101 E Pacific Coast Hwy Kings Mountain, NC 28086 Wilmington, CA 90748 USA USA [email protected] [email protected] Steve Evon Wayne Paschall Senior Member, IEEE Member, IEEE Rockwell Automation Rockwell Automation 6040 Ponders Ct. 101 Reliance Road Greenville, SC 29615 Kings Mountain, NC 28086 USA USA [email protected] [email protected] Abstract - In recent years much has been written II. WHAT PURPOSE DOES PERFORMING A about motors concerning efficiencies, vibration TORSIONAL ANALYSIS SERVE AND WHEN IS and resonance conditions as they relate to the IT REQUIRED? WHAT OCCURS DURING A American Petroleum Institutes (API) Standard TORSIONAL RESONANT CONDITION? 541 and motor diagnostics. Most of these papers and articles assume that the reader has Torsional vibration is an oscillatory twisting of significant knowledge of motor theory and the shaft. A motor by design applies a torsional operation. However, this assumption is overly force to the driven equipment and the driven optimistic, considering that only a few colleges equipment applies an equal and opposite force teach motor theory today and that application back to the motor. The shaft system deflects in experience at motor user locations has been torsion or twists away from the free position. At reduced in recent years. free vibration, and at its natural frequencies, the twist is free to unwind, twisting back to the free Index Terms – AC Induction Motors, position and, if undamped, twist an equal amount Efficiency, Torsional, Lateral Critical Speed, in the opposite direction. -

Evaluation of Direct Torque Control with a Constant-Frequency Torque Regulator Under Various Discrete Interleaving Carriers
electronics Article Evaluation of Direct Torque Control with a Constant-Frequency Torque Regulator under Various Discrete Interleaving Carriers Ibrahim Mohd Alsofyani and Kyo-Beum Lee * Department of Electrical and Computer Engineering, Ajou University, 206, World cup-ro, Yeongtong-gu Suwon 16499, Korea * Correspondence: [email protected]; Tel.: +82-31-219-2376 Received: 25 June 2019; Accepted: 20 July 2019; Published: 23 July 2019 Abstract: Constant-frequency torque regulator–based direct torque control (CFTR-DTC) provides an attractive and powerful control strategy for induction and permanent-magnet motors. However, this scheme has two major issues: A sector-flux droop at low speed and poor torque dynamic performance. To improve the performance of this control method, interleaving triangular carriers are used to replace the single carrier in the CFTR controller to increase the duty voltage cycles and reduce the flux droop. However, this method causes an increase in the motor torque ripple. Hence, in this work, different discrete steps when generating the interleaving carriers in CFTR-DTC of an induction machine are compared. The comparison involves the investigation of the torque dynamic performance and torque and stator flux ripples. The effectiveness of the proposed CFTR-DTC with various discrete interleaving-carriers is validated through simulation and experimental results. Keywords: constant-frequency torque regulator; direct torque control; flux regulation; induction motor; interleaving carriers; low-speed operation 1. Introduction There are two well-established control strategies for high-performance motor drives: Field orientation control (FOC) and direct torque control (DTC) [1–3]. The FOC method has received wide acceptance in industry [4]. Nevertheless, it is complex because of the requirement for two proportional-integral (PI) regulators, space-vector modulation (SVM), and frame transformation, which also needs the installation of a high-resolution speed encoder. -
Siemens On-Stage Powerpoint-Template
Electromobility Solutions for Modern Haul Trucks 2017 Haulage & Loading Exhibition / Conference Phoenix, Arizona USA Unrestricted © Siemens Industry, Inc. 2017 usa.siemens.com/mining Introduction What is Electromobility? Electromobility is a general term for the development of electric- powered drivetrains designed to shift vehicle design away from the use of fossil fuels and carbon gas emissions. • Hybrid Electric Vehicles (Internal Combustion Engine (ICE) and batteries w/ Electric motor) • Plug-in Electric Vehicles (HEV that can be externally charged) • Battery Electric Vehicles (all electric vehicle that can be externally charged) Electric Drive Technology and Charging Solutions for Mobility. Unrestricted © Siemens Industry, Inc. 2017 2017 Haulage & Loading Exhibition and Conference Page 2 May 8, 2017 Electromobility Solutions for Modern Haul Trucks Mechanical Vehicle (MV) w/ On-board Diesel Engine Traditional Powertrain Main Components: - Diesel Engine - Torque Converter - Drive Shaft (Cardan) - Transmission - Differential - Gearbox Disadvantages: - Low efficiency - High maintenance costs Unrestricted © Siemens Industry, Inc. 2017 2017 Haulage & Loading Exhibition and Conference Page 3 May 8, 2017 Electromobility Solutions for Modern Haul Trucks Electric Vehicle (EV) w/ On-board Diesel Engine Electrical Drivetrain replaces Mechanical Drivetrain, keeps the diesel engine Main Components: - Diesel engine - Alternator w/ Rectifier - Inverters - Traction motors - Braking chopper/Grid resistor Benefits - Higher efficiency - Electrical braking -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

Overlapped Electromagnetic Coilgun for Low Speed Projectiles
ISSN (Print) 1226-1750 ISSN (Online) 2233-6656 Journal of Magnetics 20(3), 322-329 (2015) http://dx.doi.org/10.4283/JMAG.2015.20.3.322 Overlapped Electromagnetic Coilgun for Low Speed Projectiles Hany M. Mohamed1, Mahmoud A. Abdalla2*, Abdelazez Mitkees, and Waheed Sabery Electrical Engineering Branch, MTC College, Cairo, Egypt [email protected] [email protected] (Received 20 February 2015, Received in final form 16 June 2015, Accepted 16 June 2015) This paper presents a new overlapped coilgun configuration to launch medium weight projectiles. The proposed configuration consists of a two-stage coilgun with overlapped coil covers with spacing between them. The theoretical operation of a multi-stage coilgun is introduced, and a transient simulation was conducted for projectile motion through the launcher by using a commercial transient finite element software, ANSOFT MAXWELL. The excitation circuit design for each coilgun is reported, and the results indicate that the overlapped configuration increased the exit velocity relative to a non-overlapped configuration. Different configurations in terms of the optimum length and switching time were attempted for the proposed structure, and all of these cases exhibited an increase in the exit velocity. The exit velocity tends to increase by 27.2% relative to that of a non-overlapped coilgun of the same length. Keywords : electromagnetic launch, excitation circuit, lorentz force, overlapped coilgun 1. Introduction is not easy to obtain the main performance parameters and optimize the design [3]. Electromagnetic (EM) launch technology is a strong Sandia National Laboratories has succeeded in coilgun candidate to launch objects with high velocities over long design and operations by developing four guns with distances. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

United States Patent (19) 11 4,343,223 Hawke Et Al
United States Patent (19) 11 4,343,223 Hawke et al. 45) Aug. 10, 1982 54 MULTIPLESTAGE RAILGUN UCRL-52778, (7/6/79). Hawke. 75 Inventors: Ronald S. Hawke, Livermore; UCRL-82296, (10/2/79) Hawke et al. Jonathan K. Scudder, Pleasanton; Accel. Macropart, & Hypervel. EM Accelerator, Bar Kristian Aaland, Livermore, all of ber (3/72) Australian National Univ., Canberra ACT Calif. pp. 71,90–93. LA-8000-G (8/79) pp. 128, 135-137, 140, 144, 145 73) Assignee: The United States of America as (Marshall pp. 156-161 (Muller et al). represented by the United States Department of Energy, Washington, Primary Examiner-Sal Cangialosi D.C. Attorney, Agent, or Firm-L. E. Carnahan; Roger S. Gaither; Richard G. Besha . - (21) Appl. No.: 153,365 57 ABSTRACT 22 Filed: May 23, 1980 A multiple stage magnetic railgun accelerator (10) for 51) Int. Cl........................... F41F1/00; F41F 1/02; accelerating a projectile (15) by movement of a plasma F41F 7/00 arc (13) along the rails (11,12). The railgun (10) is di 52 U.S. Cl. ....................................... ... 89/8; 376/100; vided into a plurality of successive rail stages (10a-n) - 124/3 which are sequentially energized by separate energy 58) Field of Search .................... 89/8; 124/3; 310/12; sources (14a-n) as the projectile (15) moves through the 73/12; 376/100 bore (17) of the railgun (10). Propagation of energy from an energized rail stage back towards the breech 56) References Cited end (29) of the railgun (10) can be prevented by connec U.S. PATENT DOCUMENTS tion of the energy sources (14a-n) to the rails (11,12) 2,783,684 3/1957 Yoler ...r. -

Abstract Controlling Ac Motor Using Arduino
ABSTRACT CONTROLLING AC MOTOR USING ARDUINO MICROCONTROLLER Nithesh Reddy Nannuri, M.S. Department of Electrical Engineering Northern Illinois University, 2014 Donald S Zinger, Director Space vector modulation (SVM) is a technique used for generating alternating current waveforms to control pulse width modulation signals (PWM). It provides better results of PWM signals compared to other techniques. CORDIC algorithm calculates hyperbolic and trigonometric functions of sine, cosine, magnitude and phase using bit shift, addition and multiplication operations. This thesis implements SVM with Arduino microcontroller using CORDIC algorithm. This algorithm is used to calculate the PWM timing signals which are used to control the motor. Comparison of the time taken to calculate sinusoidal signal using Arduino and CORDIC algorithm was also done. NORTHERN ILLINOIS UNIVERSITY DEKALB, ILLINOIS DECEMBER 2014 CONTROLLING AC MOTOR USING ARDUINO MICROCONTROLLER BY NITHESH REDDY NANNURI ©2014 Nithesh Reddy Nannuri A THESIS SUBMITTED TO THE GRADUATE SCHOOL IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE MASTER OF SCIENCE DEPARTMENT OF ELECTRICAL ENGINEERING Thesis Director: Dr. Donald S Zinger ACKNOWLEDGEMENTS I would like to express my sincere gratitude to Dr. Donald S. Zinger for his continuous support and guidance in this thesis work as well as throughout my graduate study. I would like to thank Dr. Martin Kocanda and Dr. Peng-Yung Woo for serving as members of my thesis committee. I would like to thank my family for their unconditional love, continuous support, enduring patience and inspiring words. Finally, I would like to thank my friends and everyone who has directly or indirectly helped me for their cooperation in completing the thesis. -

Electromagnetic Flyer Plate Technology and Development of a Novel Current Distribution Sensor
Electromagnetic Flyer Plate Technology and Development of a Novel Current Distribution Sensor A doctoral thesis by Kaashif A. M. Omar (MPhys. Physics with Astrophysics, University of Leicester, 2007) Submitted in partial fulfilment of the requirements for the award of the degree of Doctor of Philosophy of Loughborough University November 2014 To the School of Electronic, Electrical and Systems Engineering, Loughborough University, Loughborough, UK © British Crown Owned Copyright 2014/AWE Acknowledgements With the grace and blessing of Allah (SWT), I have been able to complete this work, and I hope to continue in the pursuit of knowledge as is commanded by him… Completing this research project and writing up this thesis has been full of ups and downs and it has been a very long journey, I can vaguely recall a young(er) single scientist who began this work not knowing where it would lead to; now, I am happily married to my wife Humna, having just celebrated our first wedding anniversary, and about to start the next big chapter in my life, which is to become a father… On that note I would like to take this opportunity to firstly thank my father, Mr Abdul Majid Omar and my mother, Mrs Shenaz A M Omar; who have always encouraged me to push myself and instilled within me the confidence that I can achieve anything I put my mind to. Without their constant support I would never have even been able to complete my first degree In physics with Astrophysics at Leicester University, let alone have the opportunity to complete a PhD. -

Report of Contributions
MT25 Conference 2017 - Timetable, Abstracts, Orals and Posters Report of Contributions https://indico.cern.ch/e/MT25-2017 MT25 Conferenc … / Report of Contributions 3D Electromagnetic Analysis of Tu … Contribution ID: 5 Type: Poster Presentation of 1h45m 3D Electromagnetic Analysis of Tubular Permanent Magnet Linear Launcher Tuesday, 29 August 2017 13:15 (1h 45m) A short stroke and large thrust axial magnetized tubular permanent magnet linear launcher (TPMLL) with non-ferromagnetic rings is presented in this paper. Its 3D finite element (FE) models are estab- lished for sensitivity analyses on some parameters, such as air gap thickness, permanent magnet thickness, permanent magnet width, stator yoke thickness and four types of permanent magnet material, ferrite, NdFeB, AlNiCO5 and Sm2CO17 are conducted to achieve greatest thrust. Then its 2D finite element (FE) models are also established. The electromagnetic thrusts calculated by 2D and 3D finite element method (FEM) and got from prototype test are compared. Moreover, the prototype static and dynamic tests are conducted to verify the 2D and 3D electromagnetic analysis. The FE software FLUX provides the interface with the MATLAB/Simulink to establish combined simulation. To improve the accuracy of the simulation, the combined simulation between the model of the control system in Matlab/Simulink and the 3D FE model of the TPMLL in FLUX is built in this paper. The combined simulation between the control system and the 3D FE modelof the TPMLL is built. A prototype is manufactured according to the final designed dimensions. The photograph of the developed TPMLL prototype with thrust sensor and the magnetic powder brake as the load are shown.